Видение стерео является процессом восстановления глубины от изображений камеры путем сравнения двух или больше представлений той же сцены. Выход этого расчета является 3-D облаком точек, где каждая 3-D точка соответствует пикселю в одном из изображений.
Исправление стереоизображения проецирует изображения на общую плоскость изображения таким способом, которым соответствующие точки имеют те же координаты строки. Этот процесс полезен для видения стерео, потому что 2D проблема соответствия стерео уменьшает до 1D проблемы. Как пример, исправление стереоизображения часто используется в качестве шага предварительной обработки для вычислительной несоизмеримости или создания изображений анаглифа.
| Camera Calibrator | Оцените геометрические параметры одной камеры |
| Stereo Camera Calibrator | Оцените геометрические параметры стереофотоаппарата |
Укажите индексы пикселей, пространственные координаты и трехмерные системы координат
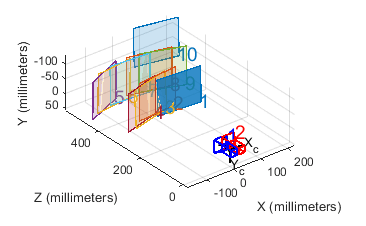
Используя приложение Stereo Camera Calibrator
Калибруйте стереофотоаппарат, который можно затем использовать, чтобы восстановить глубину с изображений.


