Визуализируйте покрытия датчика, обнаружения и дорожки
Bird's-Eye Scope визуализирует аспекты ведущего сценария, найденного в вашей модели Simulink®. Используя осциллограф, вы можете:
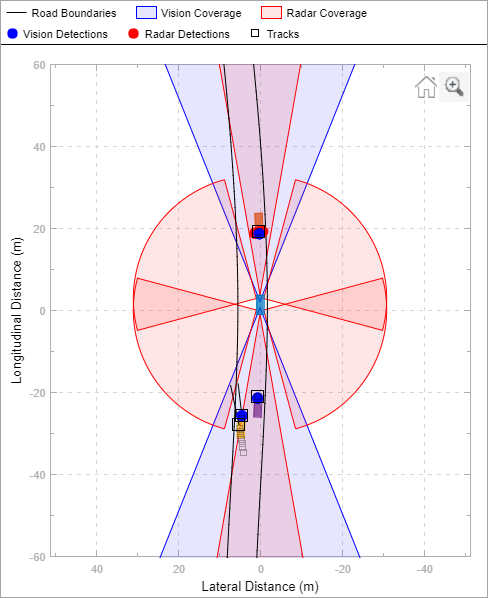
Осмотрите зоны охвата датчиков видения и радара.
Анализируйте обнаружения датчика агентов, дорожных контуров и контуров маршрута.
Анализируйте результаты отслеживания движущихся агентов в рамках сценария.
Чтобы начать, откройте осциллограф и нажмите Find Signals. Осциллограф обновляет блок-схему, находит сигналы, представляющие аспекты ведущего сценария, организует сигналы в группы и отображает сигналы. Можно затем анализировать сигналы, как вы моделируете, организуете сигналы в новые группы и изменяете графический дисплей сигналов.
Для получения дополнительной информации об использовании осциллографа, смотрите, Визуализируют Данные о Датчике и Дорожки в Видимом с большого расстояния Осциллографе.
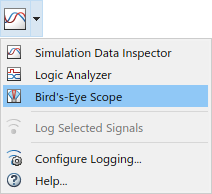
От панели инструментов модели Simulink нажмите кнопку Bird's-Eye Scope![]() . Если вместо этого вы видите, что кнопка для различного образцового инструмента визуализации, такого как Simulation Data Inspector
. Если вместо этого вы видите, что кнопка для различного образцового инструмента визуализации, такого как Simulation Data Inspector
![]() или Logic Analyzer
или Logic Analyzer
![]() , кликает по стрелке рядом с отображенной кнопкой и выбирает Bird's-Eye Scope.
, кликает по стрелке рядом с отображенной кнопкой и выбирает Bird's-Eye Scope.
Ваш новый выбор для визуализации данных сохранен через сеансы Simulink.
Модели, на которые ссылаются, не поддержаны. Чтобы визуализировать сигналы, которые являются в моделях, на которые ссылаются, переместите вывод этих сигналов к модели верхнего уровня.
Быстрый режим Accelerator не поддержан.
Если вы инициализируете свою модель в быстром перезапуске, то после того, как первый раз, когда вы моделируете, кнопка Find Signals, отключен. Чтобы включить Find Signals снова, от образцовой панели инструментов, нажимают кнопку Disable Fast Restart![]() .
.
Видимый с большого расстояния Осциллограф не поддерживает визуализацию в модели, которая содержит:
Больше чем один блок Scenario Reader.
Блок Scenario Reader в невиртуальной подсистеме, такой как атомарная или активированная подсистема.
Блок Scenario Reader, который сконфигурирован, чтобы вывести агентов и контуры маршрута в мировых координатах (набор параметра Coordinate system of outputs к World Coordinates).
Убедитесь, что все блоки датчика имеют уникальные идентификаторы датчика. Эти идентификаторы заданы в параметре Unique identifier of sensor блоков Генератора Обнаружения Генератора и Радара Обнаружения Видения. Если два блока датчика имеют тот же идентификатор, Bird's-Eye Scope визуализирует данные о датчике только из первого блока датчика, заданного в модели. Дублирующиеся идентификаторы датчика могут произойти, когда вы добавляете блок Vision Detection Generator по умолчанию и Радарные блоки Генератора Обнаружения к вашей модели. Значением параметров Unique identifier of sensor по умолчанию для этих, которые блокирует датчик, всегда является 1.
Чтобы найти источник сигнала в модели, на левой панели осциллографа, щелкают правой кнопкой по сигналу и выбирают Highlight in Model.
Можно показать или скрыть сигналы при симуляции. Например, чтобы скрыть покрытие датчика, сначала выберите его из левой панели. Затем от вкладки Properties снимите флажок Show Sensor Coverage.
Когда вы вновь открыли осциллограф после сохранения и закрытия модели, холст осциллографа первоначально пуст. Нажмите Find Signals, чтобы найти сигналы снова. Сигналы имеют те же свойства от того, когда вы продержались сохраненный модель.
Если симуляция запускается слишком быстро, можно замедлить ее при помощи следующей симуляции. От панели инструментов модели Simulink выберите Simulation> Pacing Options. Затем выберите Enable, следующий, чтобы замедлить флажок симуляции и уменьшить время симуляции к меньше, чем значение по умолчанию одной секунды на настенные вторые часы.
Конкатенация обнаружения | Много объектное средство отслеживания | Радарный генератор обнаружения | Читатель сценария | Генератор обнаружения видения
