(Не рекомендуемый), Собирают матрицы конечного элемента и решают эллиптический УЧП
assempde не рекомендуется. Используйте solvepde вместо этого.
u = assempde(model,c,a,f)u = assempde(b,p,e,t,c,a,f)[Kc,Fc,B,ud]
= assempde(___)[Ks,Fs]
= assempde(___)[K,M,F,Q,G,H,R]
= assempde(___)[K,M,F,Q,G,H,R]
= assempde(___,[],sdl)u = assempde(K,M,F,Q,G,H,R)[Ks,Fs]
= assempde(K,M,F,Q,G,H,R)[Kc,Fc,B,ud]
= assempde(K,M,F,Q,G,H,R)[, для любого из предыдущих входных синтаксисов, собирает матрицы конечного элемента с помощью формы reduced linear system, которая устраняет любые граничные условия Дирихле из системы линейных уравнений. Можно вычислить решение Kc,Fc,B,ud]
= assempde(___)u в точках узла командой u = B*(Kc\Fc) + ud. Смотрите Уменьшаемую Линейную систему.
[ собирает матрицы конечного элемента, которые представляют любые граничные условия Дирихле с помощью приближения stiff-spring. Можно вычислить решение Ks,Fs]
= assempde(___)u в точках узла командой u = Ks\Fs. Смотрите Приближение жесткого Spring.
Решите эллиптический УЧП на L-образной области.
Создайте скалярную модель PDE. Включите геометрию L-образной области.
model = createpde; geometryFromEdges(model,@lshapeg);
Примените нуль граничные условия Дирихле ко всем ребрам.
applyBoundaryCondition(model,'Edge',1:model.Geometry.NumEdges,'u',0);
Сгенерируйте mesh конечного элемента.
generateMesh(model,'GeometricOrder','linear');
Решите УЧП с параметрами c = 1, a = 0 и f = 5.
c = 1; a = 0; f = 5; u = assempde(model,c,a,f);
Постройте решение.
pdeplot(model,'XYData',u)
Решите 3-D эллиптический УЧП с помощью модели PDE.
Создайте контейнер модели PDE, импортируйте 3-D описание геометрии и просмотрите геометрию.
model = createpde; importGeometry(model,'Block.stl'); pdegplot(model,'FaceLabels','on','FaceAlpha',0.5)

Установите нуль условия Дирихле на поверхностях 1 - 4 (ребра). Установите Неймановы условия с g = -1 на поверхности 6 и g = 1 на поверхности 5.
applyBoundaryCondition(model,'Face',1:4,'u',0); applyBoundaryCondition(model,'Face',6,'g',-1); applyBoundaryCondition(model,'Face',5,'g',1);
Установите коэффициенты c = 1, a = 0 и f = 0.1.
c = 1; a = 0; f = 0.1;
Создайте mesh и решите проблему.
generateMesh(model); u = assempde(model,c,a,f);
Постройте решение на поверхности.
pdeplot3D(model,'ColorMapData',u)
Решите 2D УЧП с помощью более старого синтаксиса для mesh.
Создайте круговую геометрию.
g = @circleg;
Установите нуль граничные условия Дирихле.
b = @circleb1;
Создайте mesh для геометрии.
[p,e,t] = initmesh(g);
Решите УЧП с параметрами c = 1, a = 0 и f = sin(x).
c = 1;
a = 0;
f = 'sin(x)';
u = assempde(b,p,e,t,c,a,f);Постройте решение.
pdeplot(p,e,t,'XYData',u)
Получите матрицы конечного элемента, которые представляют проблему с помощью уменьшаемого представления линейной алгебры граничных условий Дирихле.
Создайте скалярную модель PDE. Импортируйте простую 3-D геометрию.
model = createpde;
importGeometry(model,'Block.stl');Установите нуль граничные условия Дирихле на всех поверхностях геометрии.
applyBoundaryCondition(model,'dirichlet','Face',1:model.Geometry.NumFaces,'u',0);
Сгенерируйте mesh для геометрии.
generateMesh(model);
Получите матрицы конечного элемента K, F, B и ud, которые представляют уравнение с параметрами , , и .
c = 1;
a = 0;
f = 'log(1+x+y./(1+z))';
[K,F,B,ud] = assempde(model,c,a,f);Можно получить решение u УЧП в узлах mesh путем выполнения команды
u = B*(K\F) + ud;
Обычно это решение немного более точно, чем жестко-пружинное решение, как вычислено в следующем примере.
Получите жестко-пружинное приближение матриц конечного элемента.
Создайте скалярную модель PDE. Импортируйте простую 3-D геометрию.
model = createpde;
importGeometry(model,'Block.stl');Установите нуль граничные условия Дирихле на всех поверхностях геометрии.
applyBoundaryCondition(model,'Face',1:model.Geometry.NumFaces,'u',0);
Сгенерируйте mesh для геометрии.
generateMesh(model);
Получите матрицы конечного элемента Ks и Fs, которые представляют уравнение с параметрами , , и .
c = 1;
a = 0;
f = 'log(1+x+y./(1+z))';
[Ks,Fs] = assempde(model,c,a,f);Можно получить решение u УЧП в узлах mesh путем выполнения команды
u = Ks\Fs;
Обычно это решение немного менее точно, чем уменьшаемое решение для линейной алгебры, как вычислено в предыдущем примере.
Получите полный набор матриц конечного элемента для эллиптической проблемы.
Импортируйте геометрию и настройте эллиптическую проблему с граничными условиями Дирихле. Геометрия Torus.stl имеет только одну поверхность, таким образом, вы должны установить только одно граничное условие.
model = createpde(); importGeometry(model,'Torus.stl'); applyBoundaryCondition(model,'face',1,'u',0); c = 1; a = 0; f = 1; generateMesh(model);
Создайте матрицы конечного элемента, которые представляют эту проблему.
[K,M,F,Q,G,H,R] = assempde(model,c,a,f);
Большинство получившихся матриц довольно разреженно. G, M, Q и R являются всеми нулевыми разреженными матрицами.
howsparse = @(x)nnz(x)/numel(x); disp(['Maximum fraction of nonzero entries in K or H is ',... num2str(max(howsparse(K),howsparse(H)))])
Maximum fraction of nonzero entries in K or H is 0.002006
Чтобы найти решение УЧП, вызовите assempde снова.
u = assempde(K,M,F,Q,G,H,R);
Partial Differential Equation Toolbox™ решает уравнения формы
Когда m и коэффициенты d 0, это уменьшает до
который документация вызывает уравнение elliptic, является ли уравнение эллиптическим в математическом смысле. Уравнение содержит в Ω, где Ω является ограниченной областью в два или три измерения. c, a, f и неизвестное решение u являются комплексными функциями, заданными на Ω. c может также быть матричной функцией 2 на 2 на Ω. Граничные условия задают комбинацию u и его производной по нормали на контуре:
Дирихле: hu = r на контуре ∂ Ω.
Обобщенный Нейман: · (c ∇u) + qu = g на ∂ Ω.
Смешанный: Только применимый к системам. Комбинация Дирихле и обобщенного Неймана.
исходящий нормальный модуль. g, q, h и r являются функциями, определяемыми на ∂ Ω.
Наша номенклатура отклоняется немного от традиции для теории потенциала, где Нейманово условие обычно относится к случаю, q = 0 и наш Нейман был бы назван смешанным условием. В некоторых контекстах обобщенные Неймановы граничные условия также упоминаются как граничные условия Робина. В вариационном исчислении условия Дирихле также называются существенными граничными условиями и ограничивают испытательный пробел. Неймановы условия также называются естественными условиями и возникают по мере необходимости условия для решения. Вариационная форма уравнения Partial Differential Equation Toolbox с Неймановыми условиями приведена ниже.
Приближенное решение эллиптического УЧП найдено на трех шагах:
Опишите геометрию области Ω и граничные условия. Для 2D геометрии создайте геометрию с помощью приложения PDE Modeler или через файлы MATLAB®. Для 3-D геометрии импортируйте геометрию в формате файла STL. Смотрите Геометрию, Импорт Файла STL и Граничные условия.
Создайте треугольную mesh на области Ω. Программное обеспечение имеет генерацию mesh и перерабатывающие мощности mesh. Mesh описана тремя матрицами фиксированного формата, которые содержат информацию о точках mesh, граничных сегментах и элементах.
Дискретизируйте УЧП и граничные условия, чтобы получить линейную систему Ku = F. Неизвестный векторный u содержит значения приближенного решения в точках mesh, матричный K собран от коэффициентов c, a, h, и q и правая сторона, F содержит, по существу, средние значения f вокруг каждой точки mesh и вкладов от g. Однажды матрицы K and F собран, у вас есть целая среда MATLAB в вашем распоряжении, чтобы решить линейную систему и дальнейший процесс решение.
Более тщательно продуманные приложения используют метод конечных элементов (FEM) определенная информация, возвращенная различными функциями программного обеспечения. Поэтому мы быстро обобщаем теорию и метод решателей FEM, чтобы позволить усовершенствованным приложениям полностью использовать вычисленные количества.
FEM может быть получен в итоге в следующем предложении: Спроектируйте слабую форму дифференциального уравнения на конечномерное функциональное пространство. Остальная часть этого раздела имеет дело с объяснением предыдущего оператора.
Мы запускаем со слабой формы дифференциального уравнения. Не ограничивая общность, мы принимаем обобщенные Неймановы условия на целом контуре, поскольку условия Дирихле могут быть аппроксимированы обобщенными Неймановыми условиями. В простом случае единичной матрицы h установка g = qr и затем разрешение q → ∞ приводят к условию Дирихле, потому что деление с очень большим q отменяет условия производной по нормали. Фактическая реализация отличается, поскольку предыдущая процедура может создать проблемы создания условий. Смешанное граничное условие системного случая требует более сложного лечения, описанного в Системах УЧП.
Примите, что u является решением дифференциального уравнения. Умножьте уравнение с произвольной тестовой функцией v и объединяйтесь на Ω:
Объединяйтесь частями (т.е. используйте формулу Грина) получить
Граничный интеграл может быть заменен граничным условием:
Замените исходную проблему на Находку вы таким образом что
Это уравнение называется вариационной, или слабой, формой дифференциального уравнения. Очевидно, любое решение дифференциального уравнения является также решением вариационной проблемы. Реверс верен в условиях некоторых ограничений на область и на коэффициентные функции. Решение вариационной проблемы также называется слабым решением дифференциального уравнения.
Решение u и тестовые функции v принадлежит некоторому функциональному пространству V. Следующий шаг должен выбрать подпространство Np-dimensional . Предположите, что слабая форма дифференциального уравнения на конечномерное функциональное пространство просто означает запрашивать u и v лечь в вместо V. Решение конечномерной проблемы оказывается элементом это находится самое близкое к слабому решению, когда измерено в энергетической норме. Сходимость гарантируется если пробел склоняется к V как Np →∞. Поскольку дифференциальный оператор линеен, мы требуем, чтобы вариационному уравнению удовлетворили для тестовых функций Np Φi ∊ та форма основание, т.е.
Расширьте u в том же основании элементы
и получите систему уравнений
Используйте следующие обозначения:
и перепишите систему в форме
| (K + M + Q) U = F + G. | (1) |
K, M и Q является Np-by-Np матрицы, и F и G является Np - векторы. K, M и F производятся assema, в то время как Q, G производится assemb. Когда не необходимо отличить K, M, и Q или F и G, мы сворачиваем обозначения к KU = F, которые формируют вывод assempde.
Когда проблема является самопримыкающей и эллиптической в обычном математическом смысле, матричный K + M +, Q становится симметричным и положительным определенный. Много типичных проблем имеют эти характеристики, прежде всего те, которые могут также быть сформулированы как проблемы минимизации. Для случая скалярного уравнения K, M и Q очевидно симметричны. Если c (x) ≥ δ> 0, a (x) ≥ 0 и q (x) ≥ 0 с q (x)> 0 на некоторой части ∂ Ω, то, если U ≠ 0.
UT (K + M + Q) U является энергетической нормой. Существует много вариантов тестовых функциональных пространств. Программное обеспечение использует непрерывные функции, которые линейны на каждом элементе 2D mesh, и линейны или квадратичны на элементах 3-D mesh. Кусочная линейность гарантирует, что интегралы, задающие матрицу жесткости K, существуют. Проекция на не что иное как линейная интерполяция, и оценка решения в элементе сделана только с точки зрения узловых значений. Если mesh однородно усовершенствована, аппроксимирует набор сглаженных функций на Ω.
Подходящее основание для в 2D набор функций “палатки” или “шляпы” ϕ i. Они линейны на каждом элементе и принимают значение 0 во всех узлах xj за исключением xi. Для определения основных функций для 3-D геометрии смотрите Основание Конечного элемента для 3-D. Запрос ϕ i (xi) = 1 урожай очень приятное свойство
Таким образом, путем решения системы FEM мы получаем узловые значения приближенного решения. i ϕ основной функции исчезает на всех элементах, которые не содержат узел xi. Непосредственное следствие - то, что интегралы, появляющиеся в Ki,j, Mi,j, Qi,j, Fi и Gi только, должны быть вычислены на элементах, которые содержат узел x i. Во-вторых, это означает, что Ki,j andMi,j является нулем, если xi и xj не являются вершинами того же элемента, и таким образом K и M являются очень разреженными матрицами. Их разреженная структура зависит от упорядоченного расположения индексов точек mesh.
Интегралы в матрицах FEM вычисляются путем добавления вкладов от каждого элемента до соответствующих записей (т.е. только если соответствующая точка mesh является вершиной элемента). Этот процесс обычно называется, собираясь, отсюда имя функционального assempde.
Собирающиеся стандартные программы сканируют элементы mesh. Для каждого элемента они вычисляют так называемые локальные матрицы и добавляют их компоненты в правильные положения в разреженных матрицах или векторах.
Обсуждение теперь специализируется к треугольным сеткам на 2D. Локальные 3х3 матрицы содержат интегралы, оцененные только на текущем треугольнике. Коэффициенты приняты постоянные на треугольнике, и они оценены только в треугольном барицентре. Интегралы вычисляются, используя правило средней точки. Это приближение оптимально, поскольку оно имеет тот же порядок точности как кусочная линейная интерполяция.
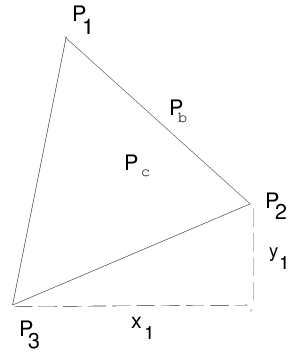
Считайте треугольник данным узлами P 1, P 2, и P 3 как в следующей фигуре.
Локальный треугольник P1P2P3
Локальные 3х3 матрицы содержат интегралы, оцененные только на текущем треугольнике. Коэффициенты приняты постоянные на треугольнике, и они оценены только в треугольном барицентре.
Самыми простыми вычислениями является для локальной большой матрицы m:
где Pc является центром массы Δ P 1P2P3, т.е.
Вклад в правую сторону F справедлив
Для локальной матрицы жесткости мы должны оценить градиенты основных функций, которые не исчезают на P 1P2P3. Поскольку основные функции линейны на треугольном P 1P2P3, градиенты являются константами. Обозначьте основные функции ϕ 1, ϕ 2, и ϕ 3 таким образом что ϕ (Pi) = 1. Если P 2 – P 3 = [x 1, y 1] T затем у нас есть это
и после интегрирования (берущий c в качестве постоянной матрицы на треугольнике)
Если две вершины треугольной лжи на контуре ∂ Ω, они способствуют линейным интегралам, сопоставленным к граничным условиям. Если этими двумя граничными точками является P 1 и P 2, то мы имеем
и
где Pb является средней точкой P 1P2.
Для каждого треугольника вершины Pm локального треугольника соответствуют индексам im точек mesh. Вклады отдельного треугольника добавляются к матрицам, таким образом что, например,
Это сделано функциональным assempde. Градиенты и области треугольников вычисляются функциональным pdetrg.
Граничные условия Дирихле обработаны немного отличающимся способом. Они устраняются из линейной системы процедурой, которая приводит к симметричной, уменьшаемой системе. Функциональный assempde может возвратить матрицы K, F, B и ud, таким образом, что решением является u = Bv + ud где Kv = F. u является Np - вектор, и если рангом условий Дирихле является rD, то v имеет Np – компоненты rD.
Подводя итоги, assempde выполняет следующие шаги, чтобы получить решение u к эллиптическому УЧП:
Сгенерируйте матрицы конечного элемента [K, M, F, Q, G, H, R]. Этот шаг эквивалентен вызову assema, чтобы сгенерировать матрицы K, M, и F и также вызов assemb, чтобы сгенерировать матрицы Q, G, H и R.
Сгенерируйте объединенные матрицы конечного элемента [Kc, Fc, B, ud]. Объединенная матрица жесткости для уменьшаемой линейной системы, Kc = K + M + Q. Соответствующим объединенным вектором загрузки является Fc = F + G. Матрица B охватывает пустой пробел столбцов H (матрица условия Дирихле представление hu = r). Вектор R представляет условия Дирихле в Hu = R. Вектор ud представляет решения для граничного условия для условий Дирихле.
Вычислите решение u через
u = B*(Kc\Fc) + ud. | (2) |
assempde использует один из двух алгоритмов для сборки проблемы в объединенную матричную форму конечного элемента. Форма reduced linear system приводит к мгновенному решению через линейную алгебру. Вы выбираете алгоритм количеством выходных параметров. Для уменьшаемой формы линейной системы запросите четыре выходных параметров:
[Kc,Fc,B,ud] = assempde(_) | (3) |
Для stiff-spring approximation запросите два выходных параметров:
[Ks,Fs] = assempde(_) | (4) |
Для получения дополнительной информации смотрите Уменьшаемое Приближение Линейной системы и жесткого Spring.
Метод конечных элементов для 3-D геометрии подобен 2D методу, описанному в Эллиптических уравнениях. Основное различие - то, что элементы в 3-D геометрии являются тетраэдрами, что означает, что основные функции отличаются от тех в 2D геометрии.
Удобно сопоставить четырехгранник с каноническим четырехгранником с системой локальной координаты (r, s, t).
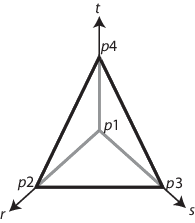
В локальных координатах точка p 1 в (0,0,0), p 2 в (1,0,0), p 3 в (0,1,0), и p 4 в (0,0,1).
Для линейного четырехгранника основные функции
Для квадратичного четырехгранника существуют дополнительные узлы в средних точках ребра.
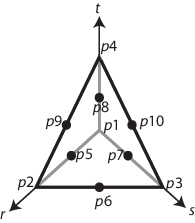
Соответствующие основные функции
Как в 2D случае, 3-D основная функция ϕi принимает значение 0 во всех узлах j, за исключением узла i, где это принимает значение 1.
