(Не рекомендуемый), Решают гиперболическую проблему УЧП
hyperbolic не рекомендуется. Используйте solvepde вместо этого.
Гиперболический решатель уравнения
Решает проблемы УЧП типа
на 2D или 3-D области Ω, или системная проблема УЧП
Переменные c, a, f и d могут зависеть от положения, время и решение u и его градиент.
u = hyperbolic(u0,ut0,tlist,model,c,a,f,d)u = hyperbolic(u0,ut0,tlist,b,p,e,t,c,a,f,d)u = hyperbolic(u0,ut0,tlist,Kc,Fc,B,ud,M)u = hyperbolic(___,rtol)u =
hyperbolic(___,rtol,atol)u = hyperbolic(u0,ut0,tlist,Kc,Fc,B,ud,M,___,'DampingMatrix',D)u = hyperbolic(___,'Stats','off')u = hyperbolic(u0,ut0,tlist,model,c,a,f,d)
на 2D или 3-D области Ω, или системная проблема УЧП
с геометрией, mesh и граничными условиями, заданными в model, с начальным значением u0 и начальная производная относительно времени ut0. Переменные c, a, f и d в уравнении соответствуют функциональным коэффициентам c, a, f и d соответственно.
u = hyperbolic(___,'Stats','off')
Решите уравнение волны
на квадратной области, заданной squareg.
Создайте модель PDE и импортируйте геометрию.
model = createpde; geometryFromEdges(model,@squareg); pdegplot(model,'EdgeLabels','on') ylim([-1.1,1.1]) axis equal

Установите граничные условия Дирихле для , и Неймановы граничные условия
для . (Нейманово граничное условие является условием по умолчанию, таким образом, вторая спецификация избыточна.)
applyBoundaryCondition(model,'dirichlet','Edge',[2,4],'u',0); applyBoundaryCondition(model,'neumann','Edge',[1,3],'g',0);
Установите начальные условия
u0 = 'atan(cos(pi/2*x))'; ut0 = '3*sin(pi*x).*exp(cos(pi*y))';
Установите времена решения.
tlist = linspace(0,5,31);
Дайте коэффициенты для проблемы.
c = 1; a = 0; f = 0; d = 1;
Сгенерируйте mesh и решите УЧП.
generateMesh(model,'GeometricOrder','linear','Hmax',0.1); u1 = hyperbolic(u0,ut0,tlist,model,c,a,f,d);
462 successful steps 51 failed attempts 1028 function evaluations 1 partial derivatives 135 LU decompositions 1027 solutions of linear systems
Постройте решение в первые и последние времена.
figure
pdeplot(model,'XYData',u1(:,1))
figure
pdeplot(model,'XYData',u1(:,end))
Для версии этого примера с анимацией смотрите уравнение Волны на Квадратной Области.
Решите уравнение волны
на квадратной области, заданной squareg, с помощью функции геометрии, чтобы задать геометрию, граничная функция, чтобы задать граничные условия, и с помощью initmesh, чтобы создать mesh конечного элемента.
Задайте геометрию как @squareg и постройте геометрию.
g = @squareg; pdegplot(g,'EdgeLabels','on') ylim([-1.1,1.1]) axis equal

Установите граничные условия Дирихле для , и Неймановы граничные условия
для . (Нейманово граничное условие является условием по умолчанию, таким образом, вторая спецификация избыточна.)
Функция squareb3 задает эти граничные условия.
b = @squareb3;
Установите начальные условия
u0 = 'atan(cos(pi/2*x))'; ut0 = '3*sin(pi*x).*exp(cos(pi*y))';
Установите времена решения.
tlist = linspace(0,5,31);
Дайте коэффициенты для проблемы.
c = 1; a = 0; f = 0; d = 1;
Создайте mesh и решите УЧП.
[p,e,t] = initmesh(g); u = hyperbolic(u0,ut0,tlist,b,p,e,t,c,a,f,d);
462 successful steps 70 failed attempts 1066 function evaluations 1 partial derivatives 156 LU decompositions 1065 solutions of linear systems
Постройте решение в первые и последние времена.
figure
pdeplot(p,e,t,'XYData',u(:,1))
figure
pdeplot(p,e,t,'XYData',u(:,end))
Для версии этого примера с анимацией смотрите уравнение Волны на Квадратной Области.
Решите гиперболическую проблему с помощью матриц конечного элемента.
Создайте модель и импортируйте геометрию BracketWithHole.stl.
model = createpde(); importGeometry(model,'BracketWithHole.stl'); figure pdegplot(model,'FaceLabels','on') view(30,30) title('Bracket with Face Labels')

figure pdegplot(model,'FaceLabels','on') view(-134,-32) title('Bracket with Face Labels, Rear View')

Установите коэффициенты c = 1, a = 0, f = 0.5 и d = 1.
c = 1; a = 0; f = 0.5; d = 1;
Сгенерируйте mesh для модели.
generateMesh(model);
Создайте начальные условия и граничные условия. Граничным условием для задней поверхности является Дирихле со значением 0. Все другие поверхности имеют граничное условие по умолчанию. Начальным условием является u(0) = 0, du/dt(0) = x/2. Дайте начальное условие на производной путем вычисления x, позиционного из каждого узла в xpts и передачи x/2.
applyBoundaryCondition(model,'Face',4,'u',0); u0 = 0; xpts = model.Mesh.Nodes(1,:); ut0 = xpts(:)/2;
Создайте связанные матрицы конечного элемента.
[Kc,Fc,B,ud] = assempde(model,c,a,f); [~,M,~] = assema(model,0,d,f);
Решите УЧП в течение многих времен от 0 до 2.
tlist = linspace(0,5,50); u = hyperbolic(u0,ut0,tlist,Kc,Fc,B,ud,M);
1493 successful steps 70 failed attempts 2956 function evaluations 1 partial derivatives 276 LU decompositions 2955 solutions of linear systems
Просмотрите решение в несколько раз. Масштабируйте все графики иметь тот же цветовой диапазон при помощи команды caxis.
umax = max(max(u)); umin = min(min(u)); subplot(2,2,1) pdeplot3D(model,'ColorMapData',u(:,5)) caxis([umin umax]) title('Time 1/2') subplot(2,2,2) pdeplot3D(model,'ColorMapData',u(:,10)) caxis([umin umax]) title('Time 1') subplot(2,2,3) pdeplot3D(model,'ColorMapData',u(:,15)) caxis([umin umax]) title('Time 3/2') subplot(2,2,4) pdeplot3D(model,'ColorMapData',u(:,20)) caxis([umin umax]) title('Time 2')

Решение, кажется, имеет частоту одной, потому что графики время от времени 1/2 и 3/2 показывают максимальные значения, и те время от времени 1 и 2 показывают минимальные значения.
Решите гиперболическую проблему, которая включает затухание. Необходимо использовать матричную форму конечного элемента, чтобы использовать затухание.
Создайте модель и импортируйте геометрию BracketWithHole.stl.
model = createpde(); importGeometry(model,'BracketWithHole.stl'); figure pdegplot(model,'FaceLabels','on') view(30,30) title('Bracket with Face Labels')

figure pdegplot(model,'FaceLabels','on') view(-134,-32) title('Bracket with Face Labels, Rear View')

Установите коэффициенты c = 1, a = 0, f = 0.5 и d = 1.
c = 1; a = 0; f = 0.5; d = 1;
Сгенерируйте mesh для модели.
generateMesh(model);
Создайте начальные условия и граничные условия. Граничным условием для задней поверхности является Дирихле со значением 0. Все другие поверхности имеют граничное условие по умолчанию. Начальным условием является u(0) = 0, du/dt(0) = x/2. Дайте начальное условие на производной путем вычисления x, позиционного из каждого узла в xpts и передачи x/2.
applyBoundaryCondition(model,'Face',4,'u',0); u0 = 0; xpts = model.Mesh.Nodes(1,:); ut0 = xpts(:)/2;
Создайте связанные матрицы конечного элемента.
[Kc,Fc,B,ud] = assempde(model,c,a,f); [~,M,~] = assema(model,0,d,f);
Используйте матрицу затухания, которая составляет 10% большой матрицы.
Damping = 0.1*M;
Решите УЧП в течение многих времен от 0 до 2.
tlist = linspace(0,5,50);
u = hyperbolic(u0,ut0,tlist,Kc,Fc,B,ud,M,'DampingMatrix',Damping);1441 successful steps 70 failed attempts 2839 function evaluations 1 partial derivatives 288 LU decompositions 2838 solutions of linear systems
Постройте максимальное значение каждый раз. Ослабление колебаний немного как время увеличивается.
plot(max(u)) xlabel('Time') ylabel('Maximum value') title('Maximum of Solution')

Метод конечных элементов для 3-D геометрии подобен 2D методу, описанному в Эллиптических уравнениях. Основное различие - то, что элементы в 3-D геометрии являются тетраэдрами, что означает, что основные функции отличаются от тех в 2D геометрии.
Удобно сопоставить четырехгранник с каноническим четырехгранником с системой локальной координаты (r, s, t).
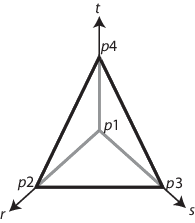
В локальных координатах точка p 1 в (0,0,0), p 2 в (1,0,0), p 3 в (0,1,0), и p 4 в (0,0,1).
Для линейного четырехгранника основные функции
Для квадратичного четырехгранника существуют дополнительные узлы в средних точках ребра.
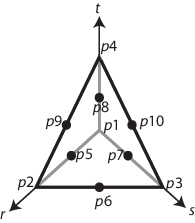
Соответствующие основные функции
Как в 2D случае, 3-D основная функция ϕi принимает значение 0 во всех узлах j, за исключением узла i, где это принимает значение 1.
