Механизм механизма, который позволяет управляемым валам вращаться на различных скоростях
Simscape / Автомобильная трансмиссия / Механизмы

Этот блок представляет механизм механизма, который позволяет управляемым валам вращаться на различных скоростях. Дифференциалы распространены в автомобилях, где они позволяют различным колесам вращаться на различных скоростях при движении на повороте. Порты D, S1 и S2 представляют управление и управляемые валы дифференциала. Любой из валов может управлять остающимися двумя.
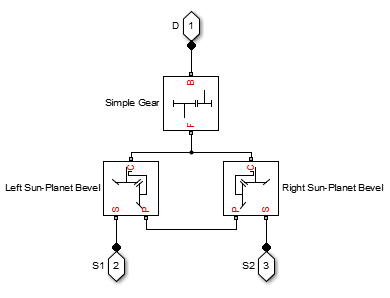
Блок моделирует дифференциальный механизм как структурное компонентно-ориентированное на Простых блоках Simscape™ Driveline™ Скоса Механизма и Планеты Sun. Данные показывают блок-схему этого структурного компонента.
Чтобы увеличить точность модели механизма, можно задать свойства, такие как инерция механизма, запутывающие потери и вязкие потери. По умолчанию инерция механизма и вязкие потери приняты незначительные. Блок позволяет вам задать инерцию поставщика услуг механизма и внутренних механизмов планеты только. Чтобы смоделировать инерцию внешних механизмов, соедините блоки Инерции Simscape с портами D, S1 и S2.
Можно смоделировать эффекты теплового потока и изменения температуры через дополнительный тепловой порт сохранения. По умолчанию тепловой порт скрыт. Чтобы представить тепловой порт, щелкните правой кнопкой по блоку по своей модели и, из контекстного меню, выберите Simscape> Block choices. Выберите вариант, который включает тепловой порт. Задайте связанные тепловые параметры для компонента.
Дифференциал налагает одно кинематическое ограничение на три связанных оси:
ω D = ± (1/2) g D (ω S1 + ω S2),
с верхним (+) или ниже (–) знак, допустимый для дифференциальной короны направо или оставленный, соответственно, средней линии. Эти три степени свободы уменьшают до двух независимых степеней свободы. Пары механизма (1,2) = (S, S) и (C, D). C является поставщиком услуг.
Сумма боковых движений является преобразованным продольным движением. Различие движений ω S1 стороны – ω S2 независимо от продольного движения. Общее движение боковых валов является суперпозицией этих двух независимых степеней свободы, которые имеют это физическое значение:
Одна (продольная) степень свободы эквивалентна двум боковым валам, вращающимся в той же угловой скорости (ω S1 = ω S2) и в фиксированном отношении относительно продольного вала.
Другая степень свободы (дифференциал) эквивалентна хранению продольного заблокированного вала (ωD = 0), в то время как боковые валы вращаются друг относительно друга в противоположных направлениях (ω S1 = –ωS2).
Крутящие моменты вдоль боковых осей, τ S1 и τ S2, ограничиваются к продольному крутящему моменту τ D таким способом, которым потоки энергии в и из механизма, меньше любых потерь мощности потеря P, суммируют, чтобы обнулить:
ω S1τS1 + ω S2τS2 + ω DτD – потеря P = 0.
Когда кинематические ограничения и ограничения степени объединены, идеальные урожаи случая:
g DτD = 2 (ω S1τS1 + ω S2τS2) / (ω S1 + ω S2).
В неидеальном случае, . Смотрите образцовые механизмы с потерями.
Механизмы приняты твердые.
Кулоново трение замедляет симуляцию. Смотрите Настраивают Точность Модели.
| Порт | Описание |
|---|---|
| D | Вращательный порт сохранения, представляющий продольный карданный вал |
| S1 | Вращательный порт сохранения, представляющий один из механизмов солнца |
| S2 | Вращательный порт сохранения, представляющий один из механизмов солнца |
| H | Тепловой порт сохранения для теплового моделирования |
Выберите размещение косоугольного механизма короны относительно средней линии блока механизма. Значением по умолчанию является To the right of the centerline.
Фиксированное отношение g D поставщика услуг связывает с продольным механизмом карданного вала. Значением по умолчанию является 4.
Параметры для того, чтобы поймать в сети потери меняются в зависимости от выбранного варианта блока — один с тепловым портом для теплового моделирования и один без него.
Вектор вязких коэффициентов трения [μ S
μ D] для поставщика услуг солнца и продольных заключающих в корпус карданный вал движений механизма, соответственно. Значением по умолчанию является [0 0].
Из выпадающего списка выберите модули. Значением по умолчанию являются ньютон-метры / (радианы/секунда) (N*m/(rad/s)).
Момент инерции поставщика услуг механизма планеты. Это значение должно быть положительным или нуль. Введите 0, чтобы проигнорировать инерцию поставщика услуг. Значением по умолчанию является 0 kg*m^2.
Момент инерции объединенных механизмов планеты. Это значение должно быть положительным или нуль. Введите 0, чтобы проигнорировать инерцию механизма. Значением по умолчанию является 0 kg*m^2.
Тепловая энергия, требуемая изменить температуру компонента одной степенью. Чем больше количество тепла, тем более стойкий компонент к изменению температуры. Значением по умолчанию является 50 J/K.
Температура компонента в начале симуляции. Начальная температура изменяет эффективность компонента согласно вектору эффективности, который вы задаете, влияя на запутывающий запуск или потери трения. Значением по умолчанию является 300 K.
Для оптимальной производительности симуляции используйте Meshing Losses> настройка по умолчанию параметра Friction model, No meshing losses - Suitable for HIL simulation.
Дисковая муфта сцепления | Простой механизм | Скос планеты Sun
