В этом примере вы связываете две вращающейся инерции. В первой связи инерция вращается с той же угловой скоростью вдоль одного вала (ось автомобильной трансмиссии). Затем инерция вращается в различных скоростях, когда они вращаются вдоль двух валов и связываются механизмом. Наконец, инерция связана механизмом и приведена в действие внешним крутящим моментом, так, чтобы они вращались на различных уровнях и испытали различные крутящие моменты. Для каждой модели пример использует основное механическое устройство Simscape™ и блоки Simscape Driveline™, такие как Инерция, Простой Механизм и Настройка Решателя.
Создайте первую версию самой простой, нетривиальной модели автомобильной трансмиссии, две инерции, вращающаяся вместе вдоль той же оси. Откройте Simscape Driveline, Simscape, и библиотеки блоков Simulink® и новое окно модели Simulink.
Перетащите мышью две Инерции, два Идеальных Вращательных Датчика Движения, две Механических Вращательных Ссылки и два блока Конвертера Simulink PS в окно модели.
От библиотеки Simscape Utilities перетащите Блок Configuration Решателя. Каждая топологически отличная блок-схема автомобильной трансмиссии требует точно одного экземпляра этого блока.
От Библиотеки Simulink перетащите мышью Осциллограф, Мультиплексор и две пары Goto и От блоков. Соедините блоки как показано в следующих фигурах. Подсистемы датчика располагаются иерархически.
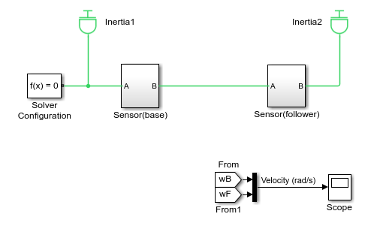
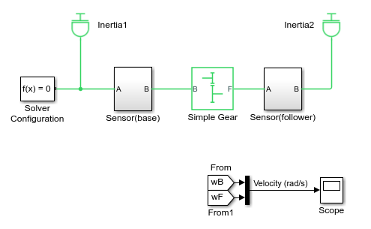
Модель с двумя вращающейся инерцией
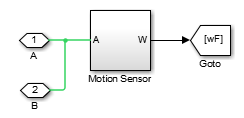
Подсистема датчика
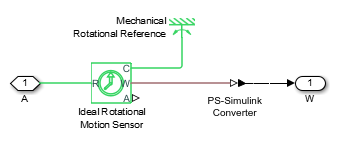
Подсистема датчика движения
В начале симуляции, потому что нет никакого затухания, инерция вращается в начальной скорости, которую вы задаете. Строка связи между двумя блоками Инерции требует, чтобы у них была та же вращательная скорость. Чтобы задать начальную вращательную скорость, откройте каждый блок Inertia. Во вкладке Variables установите флажок Rotational velocity и установите параметр Value на радианы/секунда pi (rad/s).
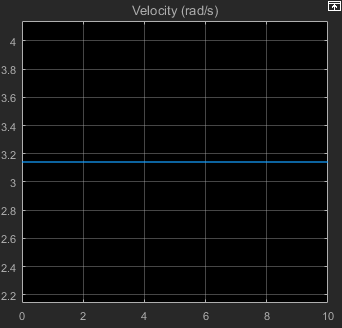
Откройте блок Scope и запустите симуляцию. Две угловых скорости являются постоянными в 3,14 радианах/секунда.
Измените модель вы созданный путем связи двух вращающейся инерции с простым, идеальным механизмом с фиксированным передаточным отношением.
От библиотеки блоков Simscape Driveline перетащите мышью блок Simple Gear в свою модель. Откройте блок. Измените основное последователем значение передаточного отношения по умолчанию на 1. Измените меню Output shaft rotates на In same direction as input shaft и нажмите OK. Простой механизм затем представляет два колеса механизма, вращающиеся вместе на том же уровне в том же направлении с одним колесом в другом. Соедините блоки как показано в следующей фигуре.
Модель с двумя вращающейся инерцией, двойной механизмом
Оставьте начальные угловые скорости в pi в блоках Инерции.
Откройте Осциллограф и запустите симуляцию. Две угловых скорости являются постоянными в 3,14 радианах/секунда для обеих Инерции.
Возвратите меню Output shaft rotates к In opposite direction to input shaft. Простой механизм затем становится двумя колесами, вращающимися вместе в противоположных направлениях с этими двумя колесами, пойманными в сети на их соответствующих наружных поверхностях. Измените начальную скорость в Inertia2 к -pi.
Перезапустите симуляцию. Две угловых скорости являются 3,14 и –3.14 радианами/секунда для Inertia1 и Inertia2, соответственно. Вторая угловая скорость является тем же самым, но с противоположным знаком, потому что эти два тела вращаются в противоположных направлениях.
Измените меню Output shaft rotates снова на In same direction as input shaft.
В окончательной версии простой модели механизма вы приводите в действие инерцию с внешним крутящим моментом вместо того, чтобы запустить их с фиксированных начальных угловых скоростей. Внешний крутящий момент отличается синусоидально. Можно найти завершенную версию этой модели в модели sdl_gear в качестве примера.
От библиотеки Simscape Foundation скопируйте Идеальный Источник Крутящего момента и два Идеальных блока Датчика Крутящего момента плюс блок Simulink-PS Converter и другой блок Mechanical Rotational Reference. От Библиотеки Simulink перетащите мышью блок Sine Wave и еще две пары Goto и От блоков.
Соедините блоки как показано в следующих фигурах. Подсистемы Датчика Крутящего момента располагаются параллельно с подсистемами Датчика Движения в блоках подсистемы Датчика. Обнулите начальные скорости обеих Инерции. Измените основное последователем значение передаточного отношения по умолчанию на 2. Измените блок Scope, чтобы добавить другую ось для измерения крутящих моментов. Соедините другие блоки как показано.
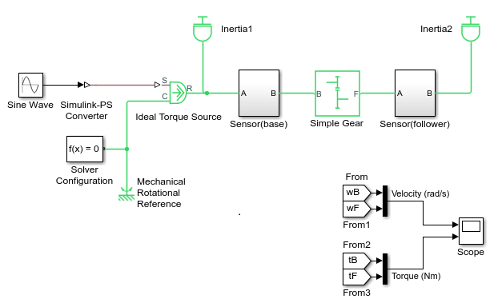
Модель с двумя вращающейся инерцией, двойной механизмом и приводимой в действие с крутящим моментом
Обновленная подсистема датчика
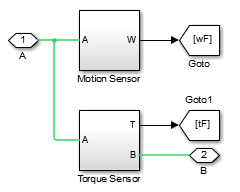
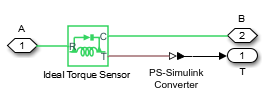
Закрутите подсистему датчика
Откройте блок Scope и запустите симуляцию.
Измеренные крутящие моменты и угловые скорости отличаются синусоидально. Как в предыдущих моделях, угловая скорость Inertia2 вдвое меньше чем это Inertia1. Крутящий момент во втором (последователь) вал является дважды этим в первом, как требуется согласно законам связи механизма.
Для блока Simple Gear измените меню Output shaft rotates на In opposite direction to input shaft и перезапустите симуляцию. Тот же угловой результат скоростей и крутящих моментов, за исключением того, что значения, сопоставленные с Inertia2 и вторым валом, отрицательны, потому что второе тело и второй вал вращаются в противоположных направлениях.
Механический датчик и исходные блоки, которые вы используете в предыдущих моделях, иллюстрируют их двойственный характер. Они действуют как сами компоненты автомобильной трансмиссии, но также и позволяют вам ввести и извлечь физические сигналы, сопоставленные с движением и крутящим моментом, включая соответствующие физические единицы измерения. Можно использовать эти физические сигналы с другими блоками в Simscape физическая среда моделирования или преобразовать их в безразмерные Сигналы Simulink для использования в нефизической части модели. И датчик и исходные блоки имеют пары механических портов и соединяются или последовательно с или через строки физического соединения.
Механический датчик и исходные блоки имеют и порты сохранения механического устройства![]() и порты физического сигнала
и порты физического сигнала![]() .
.
Много блоков Simscape Driveline также показывают соединение сохранения механического устройства и портов физического сигнала.
Идеальный Источник Крутящего момента вводит крутящий момент вперед, или последовательно с, строка связи автомобильной трансмиссии. Идеальный Датчик Крутящего момента измеряет крутящий момент, текущий вперед, или последовательно с, строка связи автомобильной трансмиссии.
Идеальный Вращательный Датчик Движения сообщает о различии между движениями в его двух портах подключения.
Чтобы извлечь абсолютное движение в его порте R, соедините порт C с механическим ссылочным блоком, который основывает тот порт, чтобы обнулить движение.
