В Simscape™ Multibody™ вы приводите в действие соединение непосредственно с помощью объединенного блока. В зависимости от приложения объединенные входные параметры приведения в действие могут включать переменные силы/крутящего момента или движения. В этом примере вы предписываете крутящий момент приведения в действие для шарнирного соединения в модели связи с четырьмя панелями.
Преобразуйте блоки Датчика, добавляет движение, распознающееся к модели. Можно построить обнаруженные переменные и использовать графики для кинематического анализа. В этом примере вы строите кривые разветвителя трех типов связи с четырьмя панелями: заводная рукоятка-рокер, двойной чудак и двойной рокер.
Связь с четырьмя панелями содержит четыре ссылки, которые соединяют с четырьмя шарнирными соединениями, чтобы сформировать плоский замкнутый цикл. Эта связь преобразовывает движение входной ссылки в движение выходной ссылки. В зависимости от относительных длин четырех ссылок связь с четырьмя панелями может преобразовать вращение во вращение, вращение в колебание или колебание в колебание.
Ссылки идут различными именами согласно своим функциям в связи с четырьмя панелями. Например, разветвитель соединяет движение передачи между ссылками чудака и рокера. Таблица суммирует различные типы ссылки, которые можно найти в связи с четырьмя панелями.
| Ссылка | Движение |
|---|---|
| Заводная рукоятка | Вращается относительно наземной ссылки |
| Рокер | Колеблется относительно наземной ссылки |
| Разветвитель | Движение передач между ссылками чудака и рокера |
| Земля | Твердо соединяет связь с четырьмя панелями с миром или другой подсистемой |
Ссылкам свойственно иметь комплексные формы. Это особенно верно для наземной ссылки, которая может быть просто фиксатором, содержащим два центра, монтирует, что подключение к чудаку или рокеру соединяется. Можно идентифицировать ссылки с комплексными формами как твердый промежуток между двумя смежными шарнирными соединениями. В примере Моделируют Кинематическую Цепочку С обратной связью, твердый промежуток между двумя центрами монтируется, представляет наземную ссылку.
Тип преобразования движения, которое обеспечивает связь с четырьмя панелями, зависит от типов ссылок, которые это содержит. Например, связь с четырьмя панелями, которая содержит две ссылки заводной рукоятки, преобразовывает вращение во входной ссылке во вращение в выходной ссылке. Этот тип связи известен как связь двойной заводной рукоятки. Другие комбинации ссылки обеспечивают различные типы преобразования движения. Таблица описывает различные типы связей с четырьмя панелями, которые можно смоделировать.
| Связь | Движение ввода - вывода |
|---|---|
| Заводная рукоятка-рокер | Непрерывное колебание вращения (и наоборот) |
| Двойная заводная рукоятка | Непрерывное непрерывное вращением вращение |
| Двойной рокер | Колебание колебания |
Теорема Grashof обеспечивает основное условие, которое должна удовлетворить связь с четырьмя панелями так, чтобы по крайней мере одна ссылка завершила полный оборот. Согласно этой теореме, связь с четырьмя панелями содержит одну или несколько ссылок заводной рукоятки, если объединенная длина самых коротких и самых длинных ссылок не превышает объединенную длину двух остающихся ссылок. Математически, условие Grashof:
s+l ≤ p+q
s является самой короткой ссылкой
l является самой длинной ссылкой
p и q являются двумя остающимися ссылками
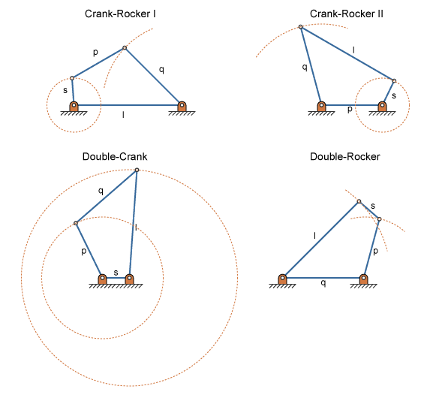
Связь Grashof может иметь три различных типа:
Заводная рукоятка-рокер
Двойная заводная рукоятка
Двойной рокер
Путем изменения наземной ссылки можно изменить тип связи Grashof. Например, путем присвоения ссылки заводной рукоятки связи заводной рукоятки-рокера как наземная ссылка, вы получаете связь двойной заводной рукоятки. Данные показывают четыре связи, что вы получаете путем изменения наземной ссылки.
В этом примере вы выполняете две задачи. Сначала вы добавляете вход приведения в действие крутящего момента в модель. Затем вы обнаруживаете движение ссылок чудака и рокера относительно Мирового кадра. Вход приведения в действие является крутящим моментом, что вы обращаетесь к соединению, соединяющему основу со ссылкой заводной рукоятки. Поскольку вы применяете крутящий момент в соединении, можно добавить этот крутящий момент непосредственно через объединенный блок. Блок, в который вы добавляете вход приведения в действие, называется Шарнирным соединением Основной Заводной рукоятки.
Вы добавляете вход приведения в действие в объединенный блок через входной порт физического сигнала. Этот порт скрыт по умолчанию. Чтобы отобразить его, необходимо выбрать Provided by Input из Actuation> Torque выпадающий список.
Можно затем задать значение крутящего момента с помощью или Simscape или блоков Simulink®. Если вы используете блоки Simulink, необходимо использовать блок Simulink-PS Converter. Этот блок преобразовывает Сигнал Simulink в физический сигнал, который может использовать Simscape Multibody. Для получения дополнительной информации смотрите Приведение в действие и Обнаружение с Физическими сигналами.
Чтобы обнаружить чудака и рокера соединяют движение, вы используете блок Transform Sensor. С этим блоком можно обнаружить движение между любыми двумя кадрами в модели. В этом примере вы используете его, чтобы распознаться [Y Z] координаты ссылок чудака и рокера относительно Мирового кадра.
Выходные порты физического сигнала блоков Датчика Преобразования скрыты по умолчанию. Чтобы отобразить их, необходимо выбрать соответствующее движение выходные параметры. Используя Конвертер Simulink PS, можно преобразовать физический сигнал выходные параметры в Сигналы Simulink. Можно затем соединить получившиеся Сигналы Simulink с другими блоками Simulink.
В этом примере вы выводите координаты ссылки чудака и рокера к рабочей области с помощью Simulink Для блоков Рабочей области. Вывод от этих блоков обеспечивает основание для графиков фазы, показывающих различные пути ссылок.
Обеспечьте объединенный вход приведения в действие, задайте объединенную внутреннюю механику и обнаружьте координаты положения кадров конца ссылки разветвителя.
В командной строке MATLAB® введите smdoc_four_bar. Четыре модели панели открываются. Для получения инструкций по тому, как создать эту модель, см. Модель Кинематическая Цепочка С обратной связью.
В диалоговом окне блока Base-Crank Revolute Joint, в Actuation> Torque выпадающий список, выбирают Provided by Input. Блок представляет входной порт физического сигнала, маркировал t.
Перетащите эти блоки в модель. Блоки позволяют вам задать сигнал крутящего момента приведения в действие.
| Библиотека | Блок |
|---|---|
| Simulink> Sources | Постоянный |
| Simscape> Utilities | Конвертер PS Simulink |
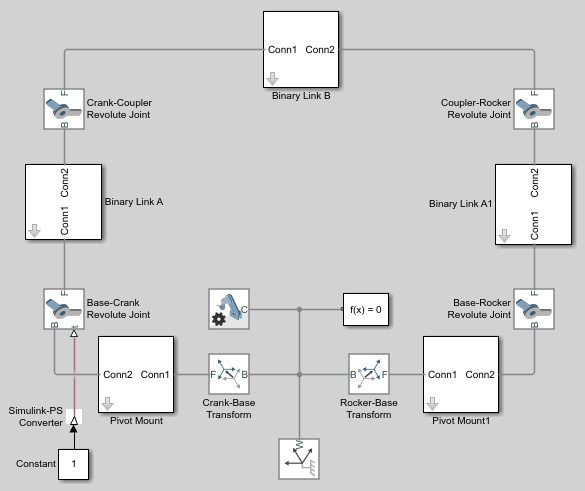
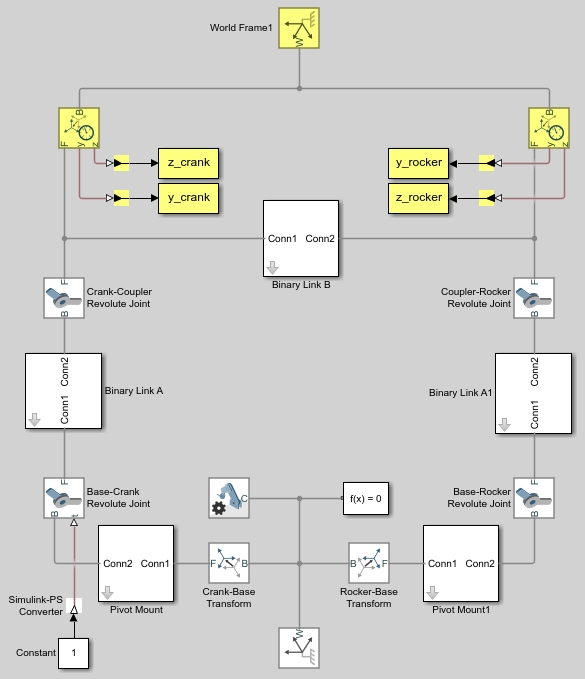
Соедините блоки как показано в фигуре. Новые блоки заштрихованы серые.
Действительные соединения рассеивают налог на энергоресурсы к затуханию. Можно задать соединение, ослабляющее непосредственно в диалоговых окнах блока. В каждом диалоговом окне блока Revolute Joint, под Internal Mechanics> Damping Coefficient, вводят 5e-4 и нажимают OK.
Добавьте эти блоки в модель. Блоки позволяют вам обнаружить положение кадра во время симуляции.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape> Multibody> Frames and Transforms | Преобразуйте датчик | 2 |
| Simscape> Multibody> Frames and Transforms | Мировой кадр | 1 |
| Simscape> Utilities | Конвертер Simulink PS | 4 |
| Simulink> Sinks | К рабочей области | 4 |
В диалоговых окнах блока Transform Sensor выберите Translation> Y и Translation> Z. Измените размер блока по мере необходимости.
В параметрах Output signal unit диалоговых окон блока PS-Simulink Converter введите cm.
В параметрах Variable Name диалоговых окон блока To Workspace введите имена переменных:
y_crank
z_crank
y_rocker
z_rocker
Соедините и назовите блоки как показано в фигуре, вращая их по мере необходимости. Гарантируйте, что К блокам Рабочей области с z_crank и z_rocker именами переменных соединяются с портами кадра z блоков Датчика Преобразования. Новые блоки заштрихованы желтые.
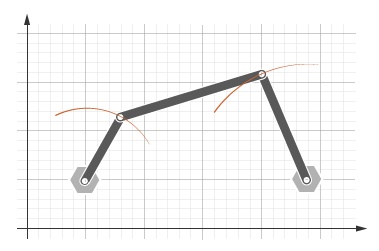
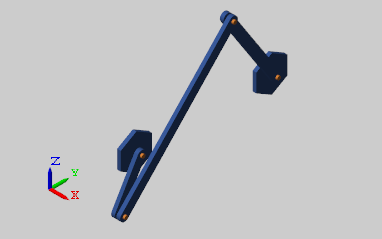
Запустите симуляцию. Можно сделать это на панели инструментов Simulink путем щелкания по кнопке Run. Mechanics Explorer проигрывает основанную на физике анимацию четырех блоков панели.
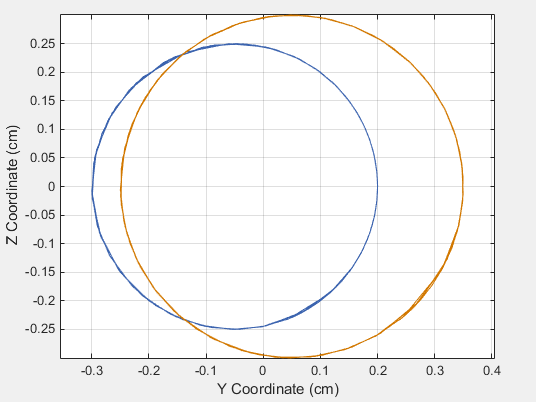
Если симуляция заканчивается, можно построить координаты положения кадров конца ссылки разветвителя, например, путем ввода следующего кода в командной строке MATLAB:
figure;
plot(y_crank.data, z_crank.data, 'color', [60 100 175]/255);
hold;
plot(y_rocker.data, z_rocker.data, 'color', [210 120 0]/255);
xlabel('Y Coordinate (cm)');
ylabel('Z Coordinate (cm)');
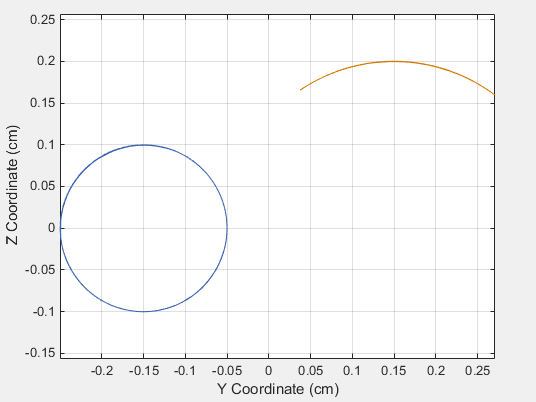
axis equal; grid on;Данные показывают график, который открывается. Этот график показывает, что заводная рукоятка завершает полный оборот, в то время как рокер завершает частичный оборот, например, он колеблется. Это поведение является характеристическим для систем заводной рукоятки-рокера.
Попытайтесь моделировать модель в режиме двойной заводной рукоятки. Можно изменить связь с четырьмя панелями в связь двойной заводной рукоятки путем изменения бинарных длин ссылки согласно таблице.
| Блок | Параметр | Значение |
|---|---|---|
| Бинарная ссылка A | Length | 25 |
| Бинарная ссылка B | Length | 20 |
| Бинарная ссылка A1 | Length | 30 |
| Основное заводной рукояткой преобразование | Translation> Offset | 5 |
| Основное рокером преобразование | Translation> Offset | 5 |
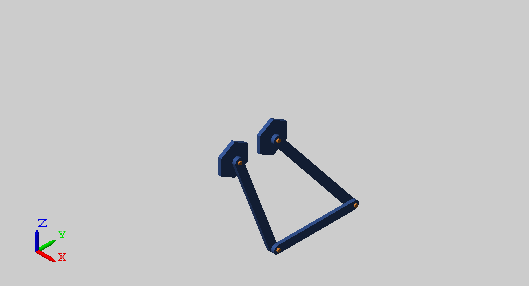
Обновите и моделируйте модель. Данные показывают обновленное отображение визуализации в Mechanics Explorer.
Постройте координаты положения кадров конца ссылки разветвителя. В командной строке MATLAB, введите:
figure;
plot(y_crank.data, z_crank.data, 'color', [60 100 175]/255);
hold;
plot(y_rocker.data, z_rocker.data, 'color', [210 120 0]/255);
xlabel('Y Coordinate (cm)');
ylabel('Z Coordinate (cm)');
axis equal; grid on;Данные показывают график, который открывается. Этот график показывает, что обе ссылки завершают полный оборот. Это поведение является характеристическим для связей двойной заводной рукоятки.