

Можно измерить перевод кадра в различных системах координат. Они включают Декартовы, цилиндрические, и сферические системы. Различные системы координат доступны через блок Transform Sensor и, ограниченно, через Объединенные блоки. Выбор системы координат зависит от модели. Выберите систему координат, которая является самой удобной для вашего приложения.
Перевод является относительным количеством. Перевод одного кадра значим только относительно другого кадра. По сути, блоки с возможностью обнаружения перевода требуют, чтобы два кадра сделали измерение: измеренные и ссылочные кадры. В этих блоках порт кадра последователя идентифицирует измеренный кадр; порт опорной рамы идентифицирует ссылочный кадр измерения.
Некоторые измерения характерны для нескольких систем координат. Одним примером является Z-координата, которая существует и в Декартовых и в цилиндрических системах. В диалоговом окне Transform Sensor координаты, которые составляют больше чем одну систему координат, появляются только однажды. Выбор Z перевод выходных параметров вдоль оси Z и в системах Декартовой и в цилиндрической координаты.
Другие измерения отличаются, но совместно используют то же имя. Например, радиус является координатой и в сферических и в цилиндрических системах. Сферический радиус отличается от цилиндрического радиуса: первый - расстояние между двумя источниками кадра; последний является расстоянием между одним источником кадра и осью Z кадра.
Чтобы дифференцироваться между двумя радиальными координатами, Simscape™ Multibody™ использует следующее соглашение:
Радиус — Цилиндрическая радиальная координата
Расстояние — Сферическая радиальная координата
Декартова система координат использует три линейных координаты — X, Y, и Z — соответствие трем взаимно ортогональным осям. Декартовы измерения перевода имеют единицы расстояния с метром, являющимся значением по умолчанию. Можно использовать блок PS-Simulink Converter, чтобы выбрать различную физическую единицу измерения при взаимодействии через интерфейс с блоками Simulink®.
![]()
Можно выбрать любую из Осей декартовой системы координат в Датчике Преобразования для обнаружения перевода. Это верно, даже если перевод ограничивается вдоль какой-либо из Осей декартовой системы координат. Выбор Осей декартовой системы координат представляет порты физического сигнала x, y, и z, соответственно.
С объединенными блоками можно обнаружить перевод вдоль каждой призматической примитивной оси. Выбор распознающегося параметра из призматического примитивного меню представляет соответствующий порт физического сигнала. Например, если вы выбираете Position из Z Prismatic Primitive (Pz) блока Cartesian Joint, блок представляет порт физического сигнала z.
Система цилиндрической координаты использует одно угловое и две линейных координаты. Линейные координаты являются цилиндрическим радиусом, R, и длиной, Z. Угловая координата является азимутом, ϕ, об оси длины. Линейные координаты имеют единицы расстояния с метром, являющимся значением по умолчанию. Угловая координата имеет модули угла с радианом, являющимся значением по умолчанию. Можно использовать блок PS-Simulink Converter, чтобы выбрать различную физическую единицу измерения при взаимодействии через интерфейс с блоками Simulink.
![]()
Только блок Transform Sensor может обнаружить перевод кадра в цилиндрических координатах. В диалоговом окне этого блока можно выбрать одну или несколько цилиндрических координат, чтобы измериться. Цилиндрические координаты называют Z, Radius и Azimuth. Выбор цилиндрических координат представляет порты физического сигнала z, рад и azm, соответственно.
Z принадлежит и Декартовым и цилиндрическим системам.
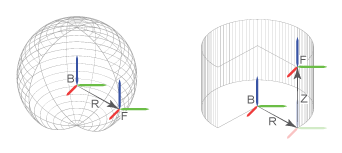
Сферическая система координат использует две угловых координаты и одну линейную координату. Линейная координата является сферическим радиусом, R. Угловые координаты являются азимутом, ϕ, и наклон, θ. Линейная координата имеет единицы расстояния с метром, являющимся значением по умолчанию. Угловые координаты имеют модули угла с радианом, являющимся значением по умолчанию. Можно использовать блок PS-Simulink Converter, чтобы выбрать различную физическую единицу измерения при взаимодействии через интерфейс с блоками Simulink.
![]()
Только блок Transform Sensor может обнаружить перевод кадра в сферических координатах. В диалоговом окне этого блока можно выбрать одну или несколько сферических координат, чтобы измериться. Сферические координаты называют Azimuth, Distance и Inclination. Выбор сферических координат представляет порты физического сигнала azm, dst, и inc, соответственно.
Azimuth принадлежит и цилиндрическим и сферическим системам. Distance является сферическим радиусом.