Реализуйте векторные модели контроллеров для постоянного магнита синхронных машин (PMSM)
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Основные Блоки Диска

Блок Vector Controller (PMSM) подобен блоку Field-Oriented Controller для машин индукции, когда это предлагает производительность "машина DC как" для синусоидальных машин постоянного магнита. Крутящим моментом машины можно управлять независимо от потока статора.
Векторные модели контроллеров PMSM являются для использования с трехфазным или пятифазовым постоянным магнитом синхронной машиной. Это имеет два рабочих режима, чтобы представлять подробное или контроллер среднего значения.
В подробном режиме блок Vector Controller (PMSM) содержит четыре основных блока, показанные для трехфазного и пятифазового PMSM, соответственно.
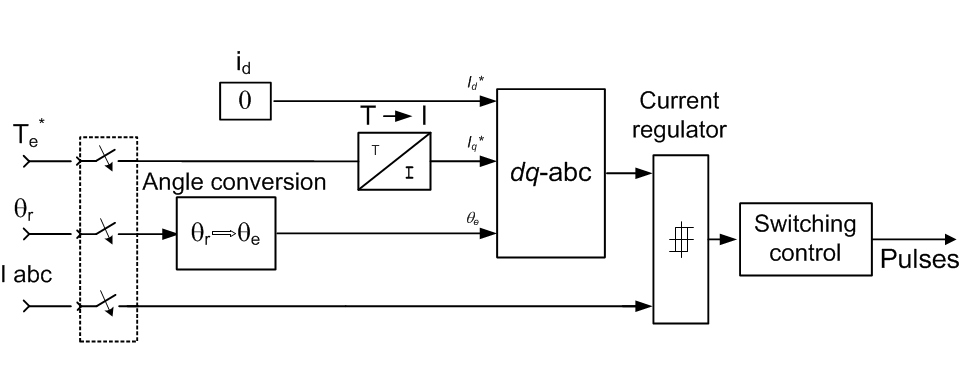
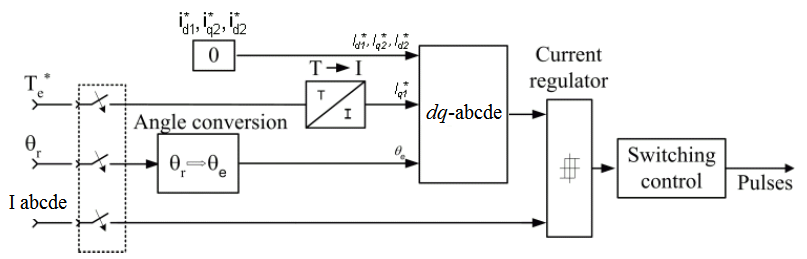
dq-abc и блоки dq-abcde выполняют преобразование dq текущих компонентов в кадре ссылки ротора в abc - и переменные abcde-фазы соответственно.
Текущий регулятор является скорострельным оружием текущий контроллер с корректируемой гистерезисной пропускной способностью.
Угловой блок преобразования вычисляет электрический угол ротора из механического угла ротора.
Переключающийся блок управления ограничивает частоту коммутации инвертора максимальным значением, которое вы задаете.
Модуляция вектора пробела может быть выбрана только для трехфазного PMSM. Следующие данные показывают блок-схему контроллера с модуляцией вектора пробела.

В этом случае текущие регуляторы являются пропорционально-интегральными регуляторами. Расчетные IQ значений* и Идентификаторы* сравниваются с фактическими значениями текущих IQ компонентов и Идентификаторов, соответственно и текущие ошибки питаются два контроллера PI, которые генерируют компоненты напряжения статора, которыми управляют, Vqs и Vds, соответственно.
Блок dq \U 03B1\\U 03B2\преобразовывает компоненты напряжения статора, которыми управляют, от вращения dq координаты в стационарные координаты αβ с помощью угла фазы поля вращения потока ротора.
Блок Space Vector Modulator получает полученный вектор напряжения Vαβ и генерирует соответствующее переключение, утверждает вектор для управления устройств переключения инвертора.
Модуль SVM содержит четыре основных блока:
Блок Селектора Сектора используется, чтобы найти сектор αβ плоскости, в которой находится вектор напряжения. αβ плоскость разделена на шесть различных секторов, расположенных с интервалами 60 градусами.
Блок Ramp Calculator используется, чтобы произвести унитарный пандус в PWM переключающаяся частота. Этот пандус используется в качестве основы времени для переключающейся последовательности.
Блок Switching Time Calculator используется, чтобы вычислить, синхронизация вектора напряжения применилась к двигателю. Вход блока является сектором, в котором находится вектор напряжения.
Логический блок Логических элементов получает последовательность синхронизации от блока Switching Time Calculator и пандус от блока Ramp Calculator. Этот блок сравнивает пандус и сигналы синхронизации логического элемента активировать переключатели инвертора в свое время.
В среднем режиме высокочастотные действия переключения выключателей питания не представлены в блоке Vector Controller (PMSM).
Средний режим подобен подробному режиму с гистерезисной модуляцией за исключением того, что нет никакого блока управления переключения, и импульсы, сгенерированные текущим регулятором, являются трехуровневыми сигналами (-1, 0, 1). Трехуровневые сигналы указывают, применяет ли инвертор среднего значения отрицание, нуль или положительное напряжение на шине DC (Vdc) к машине во время насыщения инвертора. В подробном режиме модель Vector Controller (PMSM) выводит фактические импульсы для переключателей инвертора.
Задайте образцовый уровень детализации, чтобы использовать:
Detailed (значение по умолчанию)
Average
Выберите между трехфазным и пятифазовым PMSM. Значением по умолчанию является 3.
Выберите гистерезис или модуляцию вектора пробела. Значением по умолчанию является Hysteresis.
Время выборки векторного контроллера, в секундах. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 20e-6.
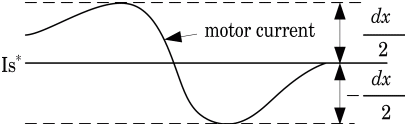
Текущая пропускная способность гистерезиса регулятора, в амперах. Этот параметр доступен только, когда параметр Model detail level устанавливается на Detailed, и Modulation type установлен в Hysteresis. Значением по умолчанию является 0.1. Это значение является общей гистерезисной пропускной способностью, распределенной симметрично вокруг текущего сетбола. Данные показывают случай, где текущим сетболом является Is*, и текущая пропускная способность гистерезиса регулятора установлена в dx.
Максимальная частота переключения инвертора, в герц. Этот параметр доступен только, когда параметр Model detail level устанавливается на Detailed, и Modulation type установлен в Hysteresis. Значением по умолчанию является 20e3.
Количество пар полюса. Значением по умолчанию является 4.
Выберите машину, постоянную, который вы хотите задать для параметризации блока. Выбором является Flux linkage established by magnets (V.s) (значение по умолчанию), Voltage Constant (V_peak L-L / krpm) и Torque Constant (N.m / A_peak).
Постоянный поток, в webers, на пары полюса вызван в обмотках статора магнитами. Значением по умолчанию является 0.175.
Пиковой строкой к линейному напряжению на 1 000 об/мин машины управляет текущий контроллер. Это напряжение представляет пиковое напряжение разомкнутой цепи, когда машина управляется как генератор на уровне 1 000 об/мин. Значением по умолчанию является 126.966.
Крутящим моментом на ампер, постоянный из машины, управляет текущий контроллер. Значением по умолчанию является 1.05.
Частота среза фильтра нижних частот первого порядка применилась к измерению напряжения на шине DC в герц. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed, и Modulation type установлен в SVM. Значением по умолчанию является 50.
Фиксированная частота переключения инвертора, в герц. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed, и Modulation type установлен в SVM. Значением по умолчанию является 20000.
D-ось текущий контроллер пропорциональное усиление. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed, и Modulation type установлен в SVM. Значением по умолчанию является 200.
D-ось текущее усиление интеграла контроллера. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed, и Modulation type установлен в SVM. Значением по умолчанию является 1000.
Q-ось текущий контроллер пропорциональное усиление. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed, и Modulation type установлен в SVM. Значением по умолчанию является 200.
Q-ось текущее усиление интеграла контроллера. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed, и Modulation type установлен в SVM. Значением по умолчанию является 1000.
TorqueСсылка крутящего момента, обычно обеспеченная контроллером скорости.
tetaУгол потока ротора.
I_abcТри тока строки трехфазного PMSM. Этот вход видим только, когда параметр Number of phases устанавливается на 3.
I_abcdeПять токов строки пятифазового PMSM. Этот вход видим только, когда параметр Number of phases устанавливается на 5.
Sig*Вектор, содержащий сигналы измерения:
iabc* — Три ссылочных тока, доступные, когда параметр Number of phases устанавливается на 3.
iabcde* — Пять ссылочных токов, доступных, когда параметр Number of phases устанавливается на 5.
Pulses* — Два трехуровневых сигнала, когда трехфазный PMSM используется (четыре трехуровневых сигнала, когда пятифазовый PMSM используется). Трехуровневые сигналы,-1, 0, или 1, указывают, применяет ли инвертор среднего значения отрицание, нуль или положительное напряжение на шине DC (Vdc) к машине.
Этот вывод видим только, когда параметр Model detail level устанавливается на Average.
GatesИмпульсы для шести переключателей инвертора. Этот вывод видим только, когда параметр Model detail level устанавливается на Detailed.
Блок Vector Controller (PMSM) используется в блоке AC6 библиотеки Electric Drives.
[1] Bose, B. K. Современная силовая электроника и диски AC, NJ: Prentice Hall, 2002.
Соедините модуль увольнения (AC) | Соедините модуль увольнения (DC) | Текущий контроллер (бесщеточный DC) | Текущий контроллер (DC) | Прямой контроллер крутящего момента | Ориентированный на поле контроллер | Переключатель регулирования | Генератор с шестью шагами | Модулятор вектора пробела | Контроллер скорости (AC) | Контроллер скорости (DC) | Контроллер скорости (скалярное управление) | Векторный контроллер (WFSM) | Контроллер напряжения (шина DC)
