Следуйте за waypoints для UAV
Система uavWaypointFollower object™ следует за набором waypoints для беспилотного воздушного автомобиля (UAV) с помощью предварительной точки. Объект вычисляет предварительную точку, желаемую направиться, и желал отклонения от курса, учитывая положение UAV, набор waypoints и предварительное расстояние. Задайте набор waypoints и настройте thelookAheadDistance входной параметр и свойство TransitionRadius для навигации по waypoints. Поддержка объектов и мультиротор и фиксированное крыло типы UAV.
Следовать за набором waypoints:
Создайте объект uavWaypointFollower и установите его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
wpFollowerObj = uavWaypointFollowerwpFollowerObj = uavWaypointFollower(Name,Value)wpFollowerObj = uavWaypointFollower создает UAV waypoint последователь со свойствами по умолчанию.
wpFollowerObj = uavWaypointFollower(Name,Value) создает UAV waypoint последователь с дополнительными опциями, заданными одним или несколькими аргументами пары Name,Value.
Name является именем свойства, и Value является соответствующим значением. Имя должно находиться внутри одинарных кавычек (' '). Можно задать несколько аргументов пары "имя-значение" в любом порядке как Name1,Value1,...,NameN,ValueN.
[lookaheadPoint,desiredHeading,desiredYaw,crossTrackError,status] = wpFollowerObj(currentPose,lookaheadDistance)[ следует за набором waypoints, заданного в waypoint объекте последователя. Объект занимает текущую позицию и предварительное расстояние, чтобы вычислить предварительную точку на пути. Желаемый заголовок, отклонение от курса и перекрестный дефект записи также основаны на этой предварительной точке по сравнению с текущим положением. lookaheadPoint,desiredHeading,desiredYaw,crossTrackError,status] = wpFollowerObj(currentPose,lookaheadDistance)status возвращает нуль, пока UAV не переместился по всему waypoints.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
При следовании за набором waypoints первый waypoint может быть проигнорирован на основе положения UAV. Из-за природы предварительного расстояния раньше отслеживал путь, waypoint проверки последователя, если UAV около следующего waypoint к переходу к следующему сегменту пути с помощью области перехода. Однако существует также условие где переходы UAV когда за пределами этой области. 3-D гиперплоскость чертится в следующем waypoint. Если положение UAV в этой гиперплоскости, waypoint переходах последователя к следующему waypoint. Это поведение помогает гарантировать, что UAV следует за достижимым путем.
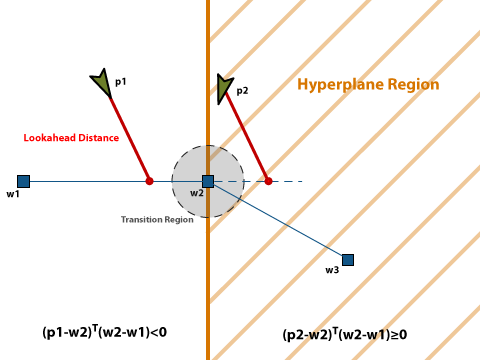
Условие гиперплоскости удовлетворено если:
(p-w1) T (w2-w1) ≥ 0
p является положением UAV, и w1 и w2 являются последовательными waypoint положениями.
Если вы находите это ограничение поведения, полагаете, что добавление большего количества waypoints на основе вашего начального положения обеспечивает последователя, чтобы перейти к вашей начальной букве waypoint.
[1] Парк, Sanghyuk, Джон Деист и Джонатан, как. "Новая нелинейная логика руководства для отслеживания траектории". Руководство AIAA, навигация, и конференция по управлению и приложение, 2004.
