Во время образцовой инициализации, подключений Simulink к ведущему устройству ROS и также создает узел, сопоставленный с моделью. Ведущий URI ROS и Хост Узла заданы в, “Конфигурируют диалоговое окно” Адресов Сети ROS. Можно получить доступ к этому в меню под Инструментами>> Операционная система робота (ROS) путем выбора “Configure ROS Network Addresses”.
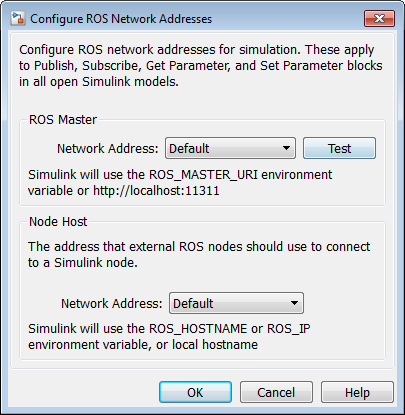
Параметр Network Address может быть установлен на “Значение по умолчанию” или “Пользовательский”.
Для ведущего URI ROS, если Network Address установлен в “Значение по умолчанию”, Simulink® использует следующие правила, чтобы установить Ведущий URI ROS:
Используйте переменную окружения ROS_MASTER_URI, если она установлена.
Если глобальная переменная MATLAB®, узел ROS существует, используют Основной URI, сопоставленный с глобальным узлом. Глобальный узел автоматически создан, когда rosinit называется.
Используйте обращаются к http://localhost:11311, если другие два правила не применяются.
Для Хоста Узла, если Network Address установлен в “Значение по умолчанию”, Simulink использует следующие правила, чтобы установить Хост Узла ROS:
Используйте переменную окружения ROS_HOSTNAME, если она установлена.
Используйте переменную окружения ROS_IP, если она установлена.
Используйте имя узла или IP-адрес первого сетевого интерфейса в системе при наличии.
Используйте обращаются к http://localhost:11311, если другие правила не применяются.
Для обоих это те же правила, что использование MATLAB, чтобы разрешить его сеть ROS обращается.
В противном случае, если вы выбрали "Custom", можно установить все переменные как показано ниже. Это заменяет переменные окружения.
Примечание: Эти адреса сохранены в настройках MATLAB, не модели. Поэтому этой информацией делятся через все модели Simulink и несколько установок MATLAB того же релиза.

Можно также использовать кнопку “Test”, чтобы гарантировать, что можно соединиться с ведущим устройством ROS. Если вы получаете ошибку, вызовите rosinit, чтобы установить локальную сеть ROS, или если вы задали удаленное ведущее устройство ROS, проверяйте, что ваши настройки правильны.
Пользовательское ведущее устройство ROS или настройки хоста узла не используются в сгенерированном коде при развертывании автономного узла.
