Сигналы заграждающего фильтра
y = bandstop(x,wpass)y = bandstop(x,fpass,fs)y = bandstop(xt,fpass)y = bandstop(___,Name,Value)[y,d] = bandstop(___)bandstop(___)y = bandstop(x,wpass)x с помощью заграждающего фильтра с частотным диапазоном полосы задерживания, заданным двухэлементным векторным wpass, и выразил в нормированных единицах рада/выборки π. bandstop использует фильтр минимального заказа с затуханием полосы задерживания 60 дБ и компенсирует задержку, введенную фильтром. Если x является матрицей, функция фильтрует каждый столбец независимо.
y = bandstop(___,Name,Value)
[ также возвращает объект y,d] = bandstop(___)digitalFilter, d раньше фильтровал вход.
bandstop(___) без выходных аргументов строит входной сигнал и накладывает отфильтрованный сигнал.
Создайте сигнал, выбранный на уровне 1 кГц в течение 1 секунды. Сигнал содержит три тона, один на уровне 50 Гц, другого на уровне 150 Гц и одну треть на уровне 250 Гц. Высокочастотные и низкочастотные тоны оба имеют дважды амплитуду промежуточного тона. Сигнал встраивается в Гауссов белый шум отклонения 1/100.
fs = 1e3; t = 0:1/fs:1; x = [2 1 2]*sin(2*pi*[50 150 250]'.*t) + randn(size(t))/10;
Заграждающий фильтр сигнал удалить тон средней частоты. Задайте частоты полосы пропускания 100 Гц и 200 Гц. Отобразите исходные и отфильтрованные сигналы, и также их спектры.
bandstop(x,[100 200],fs)

Реализуйте основной синтезатор цифровой музыки и используйте его, чтобы проигрывать традиционную песню. Задайте частоту дискретизации 2 кГц. Постройте спектрограмму песни.
fs = 2e3; t = 0:1/fs:0.3-1/fs; l = [0 130.81 146.83 164.81 174.61 196.00 220 246.94]; m = [0 261.63 293.66 329.63 349.23 392.00 440 493.88]; h = [0 523.25 587.33 659.25 698.46 783.99 880 987.77]; note = @(f,g) [1 1 1]*sin(2*pi*[l(g) m(g) h(f)]'.*t); mel = [3 2 1 2 3 3 3 0 2 2 2 0 3 5 5 0 3 2 1 2 3 3 3 3 2 2 3 2 1]+1; acc = [3 0 5 0 3 0 3 3 2 0 2 2 3 0 5 5 3 0 5 0 3 3 3 0 2 2 3 0 1]+1; song = []; for kj = 1:length(mel) song = [song note(mel(kj),acc(kj)) zeros(1,0.01*fs)]; end song = song/(max(abs(song))+0.1); % To hear, type sound(song,fs) pspectrum(song,fs,'spectrogram','TimeResolution',0.31, ... 'OverlapPercent',0,'MinThreshold',-60)

Заграждающий фильтр сигнал разделить средний регистр от других двух. Задайте частоты полосы пропускания 230 Гц и 450 Гц. Постройте исходные и отфильтрованные сигналы во временном и частотном диапазоне.
bong = bandstop(song,[230 450],fs);
% To hear, type sound(bong,fs)
bandstop(song,[230 450],fs)
Постройте спектрограмму песни без среднего регистра.
figure pspectrum(bong,fs,'spectrogram','TimeResolution',0.31, ... 'OverlapPercent',0,'MinThreshold',-60)

Отфильтруйте белый шум, выбранный на уровне 1 кГц с помощью бесконечного импульсного заграждающего фильтра ответа с шириной полосы задерживания 100 Гц. Используйте различные значения крутизны. Постройте спектры отфильтрованных сигналов.
fs = 1000; x = randn(20000,1); [y1,d1] = bandstop(x,[ 50 150],fs,'ImpulseResponse','iir','Steepness',0.5); [y2,d2] = bandstop(x,[200 300],fs,'ImpulseResponse','iir','Steepness',0.8); [y3,d3] = bandstop(x,[350 450],fs,'ImpulseResponse','iir','Steepness',0.95); pspectrum([y1 y2 y3],fs) legend('Steepness = 0.5','Steepness = 0.8','Steepness = 0.95', ... 'Location','north')

Вычислите и постройте частотные характеристики фильтров.
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) legend('Steepness = 0.5','Steepness = 0.8','Steepness = 0.95', ... 'Location','north') ylim([-120 20])

Сделайте фильтры асимметричными путем определения различных значений крутизны в ниже и более высокие частоты полосы пропускания.
[y1,d1] = bandstop(x,[ 50 150],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); [y2,d2] = bandstop(x,[200 300],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); [y3,d3] = bandstop(x,[350 450],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); pspectrum([y1 y2 y3],fs)

Вычислите и постройте частотные характеристики фильтров.
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) ylim([-120 20])

Аргумент 'Steepness' управляет шириной областей перехода фильтра. Чем ниже крутизна, тем шире область перехода. Чем выше крутизна, тем более узкий область перехода.
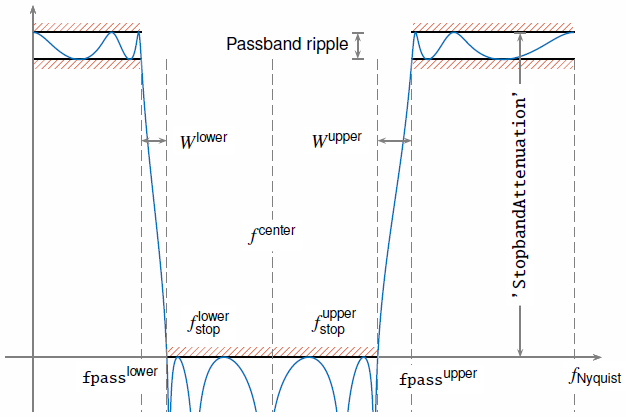
Чтобы интерпретировать крутизну фильтра, рассмотрите следующие определения:
Частота Найквиста, f Найквист, является самой высокой частотной составляющей сигнала, который может быть выбран на данном уровне без искажения. Найквисту f 1 год (×π рад/выборка), когда у входного сигнала нет времени информация и fs/2 герц, когда входной сигнал является расписанием или когда вы задаете частоту дискретизации.
Более низкие и верхние частоты полосы задерживания фильтра, f stoplower и f stopupper, являются частотами, между которыми затухание равно или больше, чем значение, заданное с помощью 'StopbandAttenuation'.
Центр области полосы задерживания является центром f = (f stoplower + f stopupper)/2.
Более низкой шириной перехода фильтра, W ниже, является f stoplower – fpass ниже.
Верхней шириной перехода фильтра, верхний W, является верхний fpass – f stopupper.
Большинство неидеальных фильтров также ослабляет входной сигнал через полосу пропускания. Максимальное значение этого зависимого частотой затухания называется пульсацией полосы пропускания. Каждый фильтр, используемый bandstop, имеет пульсацию полосы пропускания 0,1 дБ.
Чтобы управлять шириной полос перехода, можно задать 'Steepness' как любой двухэлементный вектор, [s ниже, s, верхний], или скаляр. Когда вы задаете 'Steepness' как вектор, функцию:
Вычисляет более низкую ширину перехода как
W ниже = (1 – s ниже) × (центр f – fpass ниже).
Когда первый элемент 'Steepness' равен 0,5, ширина перехода составляет 50% (центр f – fpass ниже).
Когда первый элемент 'Steepness' приближается 1, ширина перехода прогрессивно становится более узкой, пока это не достигает минимального значения 1% (центр f – fpass ниже).
Вычисляет верхнюю ширину перехода как
W, верхний = (1 – верхний s) × (верхний fpass – центр f).
Когда второй элемент 'Steepness' равен 0,5, ширина перехода составляет 50% (верхний fpass – центр f).
Когда второй элемент 'Steepness' приближается 1, ширина перехода прогрессивно становится более узкой, пока это не достигает минимального значения 1% (верхний fpass – центр f).
Когда вы задаете 'Steepness' как скаляр, функция разрабатывает фильтр с равными более низкими и верхними ширинами перехода. Значение по умолчанию 'Steepness' 0.85.
