Паркует-McClellan оптимальный КИХ-проект фильтра
b = firpm(n,f,a)b = firpm(n,f,a,w)b = firpm(n,f,a,ftype)b = firpm(n,f,a,lgrid)[b,err] = firpm(___)[b,err,res] = firpm(___)b = firpm(n,f,fresp,w)b = firpm(n,f,fresp,w,ftype)Используйте алгоритм Парков-McClellan, чтобы разработать КИХ-полосовой фильтр порядка 17. Задайте нормированные частоты полосы задерживания и рад/выборка и нормированные частоты полосы пропускания и рад/выборка. Постройте идеальные и фактические ответы значения.
f = [0 0.3 0.4 0.6 0.7 1]; a = [0 0 1 1 0 0]; b = firpm(17,f,a); [h,w] = freqz(b,1,512); plot(f,a,w/pi,abs(h)) legend('Ideal','firpm Design') xlabel 'Radian Frequency (\omega/\pi)', ylabel 'Magnitude'

Разработайте фильтр lowpass с частотой среза полосы пропускания на 1 500 Гц и частотой среза полосы задерживания на 2 000 Гц. Задайте частоту дискретизации 8 000 Гц. Потребуйте максимальной амплитуды полосы задерживания 0,01 и максимальной ошибки полосы пропускания (пульсация) 0,001. Получите необходимый порядок фильтра, нормированные ребра диапазона частот, амплитуды диапазона частот и веса с помощью firpmord.
[n,fo,ao,w] = firpmord([1500 2000],[1 0],[0.001 0.01],8000); b = firpm(n,fo,ao,w); fvtool(b,1)

Используйте алгоритм Парков-McClellan, чтобы создать 50-й порядок equiripple КИХ-полосовой фильтр, который будет использоваться с сигналами, выбранными на уровне 1 кГц.
N = 50; Fs = 1e3;
Укажите, что полоса пропускания охватывает частоты между 200 Гц и 300 Гц и что область перехода по обе стороны от полосы пропускания имеет ширину 50 Гц.
Fstop1 = 150; Fpass1 = 200; Fpass2 = 300; Fstop2 = 350;
Разработайте фильтр так, чтобы подгонка оптимизации взвесила низкочастотную полосу задерживания с весом 3, полоса пропускания с весом 1, и высокочастотную полосу задерживания с весом 100. Отобразите ответ значения фильтра.
Wstop1 = 3;
Wpass = 1;
Wstop2 = 100;
b = firpm(N,[0 Fstop1 Fpass1 Fpass2 Fstop2 Fs/2]/(Fs/2), ...
[0 0 1 1 0 0],[Wstop1 Wpass Wstop2]);
fvtool(b,1)
Разработайте фильтр lowpass с частотой среза полосы пропускания на 1 500 Гц и частотой среза полосы задерживания на 2 000 Гц. Задайте частоту дискретизации 8 000 Гц. Потребуйте максимальной амплитуды полосы задерживания 0,01 и максимальной ошибки полосы пропускания (пульсация) 0,001. Получите необходимый порядок фильтра, нормированные ребра диапазона частот, амплитуды диапазона частот и веса с помощью firpmord.
[n,fo,ao,w] = firpmord([1500 2000],[1 0],[0.001 0.01],8000); b = firpm(n,fo,ao,w); fvtool(b,1)
Если вашему проекту фильтра не удается сходиться, проект фильтра не может быть правильным. Проверьте проект путем проверки частотной характеристики.
Если вашему проекту фильтра не удается сходиться, и получившийся проект фильтра не правилен, делайте попытку одного или нескольких из следующего:
Увеличьте порядок фильтра.
Ослабьте проект фильтра путем сокращения затухания в полосах задерживания и/или расширения областей перехода.
firpm разрабатывает КИХ-фильтр линейной фазы с помощью алгоритма Парков-McClellan [1]. Алгоритм Парков-McClellan использует алгоритм обмена Remez и Чебышевскую теорию приближения разработать фильтры с оптимальной подгонкой между желаемыми и фактическими частотными характеристиками. Фильтры оптимальны в том смысле, что максимальная погрешность между желаемой частотной характеристикой и фактической частотной характеристикой минимизирована. Фильтры разработали этот путь выставка equiripple поведение в их частотных характеристиках и иногда называются фильтрами equiripple. firpm показывает разрывы в голове и хвосте его импульсного ответа из-за этой equiripple природы.
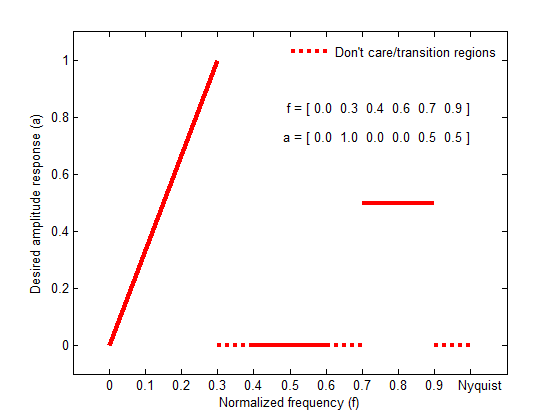
Отношение между f и векторами a в определении желаемой частотной характеристики показывают на рисунке ниже.
firpm всегда использует даже порядок фильтра для настроек с даже симметрией и ненулевой полосой пропускания на частоте Найквиста. Причина даже порядок фильтра состоит в том, что для импульсных ответов, показывающих даже симметрию и нечетные порядки, частотная характеристика на частоте Найквиста обязательно 0. Если вы задаете n с нечетным знаком, firpm постепенно увеличивает его 1.
firpm разрабатывает тип I, II, III и фильтры линейной фазы IV. Тип I и тип II являются значениями по умолчанию для n даже и нечетного n, соответственно, в то время как тип III (n даже) и вводит IV ( нечетный n) заданы с 'hilbert' или 'differentiator', соответственно, с помощью аргумента ftype.. Различные типы фильтров имеют различные симметрии и определенные ограничения на их частотные характеристики. (См. [5] для получения дополнительной информации.)
| Линейный тип фильтра фазы | Отфильтруйте порядок | Симметрия коэффициентов | Ответ H(f), f = 0 | Response H(f), f = 1 (Найквист) |
|---|---|---|---|---|
Тип I | Даже | даже: | Никакое ограничение | Никакое ограничение |
Тип II | Нечетный | даже: | Никакое ограничение | H (1)
|
Тип III | Даже | нечетный: | H (0) | H (1) |
| Введите IV | Нечетный | нечетный: | H (0) | Никакое ограничение |
Можно также использовать firpm, чтобы записать функцию, которая задает желаемую частотную характеристику. Предопределенным указателем на функцию частотной характеристики для firpm является @firpmfrf, который разрабатывает КИХ-фильтр линейной фазы.
b = firpm(n,f,a,w) эквивалентен b = firpm(n,f,{@firpmfrf,a},w), где, @firpmfrf является предопределенным указателем на функцию частотной характеристики для firpm. При желании можно записать собственную функцию отклика. Используйте help
private/firpmfrf и см. Создание указателя на функцию (MATLAB) для получения дополнительной информации.
[1] Комитет по Цифровой обработке сигналов Акустики IEEE, Речи, и Общества Обработки сигналов, программ редакторов для Цифровой обработки сигналов. Нью-Йорк: Нажатие IEEE, 1979, алгоритм 5.1.
[2] Комитет по Цифровой обработке сигналов Акустики IEEE, Речи и Общества Обработки сигналов, редакторы Выбрали Papers in Digital Signal Processing. Издание II. Нью-Йорк: Нажатие IEEE, 1976.
[3] Парки, Томас В. и К. Сидни Беррус. Создание цифровых фильтров. Нью-Йорк: John Wiley & Sons, 1987, p. 83.
[4] Rabiner, Лоуренс Р., Джеймс Х. Макклеллан и Томас В. Парки. “КИХ-Методы Создания цифровых фильтров Используя Взвешенное Чебышевское Приближение”. Продолжения IEEE®. Издание 63, Номер 4, 1975, стр 595–610.
[5] Оппенхейм, Алан V, Рональд В. Шафер и Джон Р. Бак. Обработка сигналов дискретного времени. Верхний Сэддл-Ривер, NJ: Prentice Hall, 1999, p. 486.
butter | cfirpm | cheby1 | cheby2 | ellip | fir1 | fir2 | fircls | fircls1 | firls | firpmord | rcosdesign | yulewalk
