Сконфигурируйте монокулярный датчик камеры
monoCamera объект содержит информацию о настройке монокулярного датчика камеры. Конфигурационная информация включает внутренние параметры камеры, значения внешних параметров камеры, такие как ее ориентация (аналогичный описанному подачей, отклонением от курса и списком), и местоположение камеры в транспортном средстве. Чтобы оценить внутренние и внешние параметры камеры, смотрите, Калибруют Монокулярную Камеру.
Для изображений, полученных камерой, можно использовать imageToVehicle и vehicleToImage функции, чтобы преобразовать местоположения точки между координатами изображений и координатами транспортного средства. Эти функции применяют проективные преобразования (homography), которая позволяет вам оценить расстояния от камеры, смонтированной на транспортном средстве к местоположениям на плоском дорожном покрытии.
sensor = monoCamera( создает intrinsics,height)monoCamera объект, который содержит настройку монокулярного датчика камеры, учитывая внутренние параметры камеры и высоту камеры над землей. intrinsics и height установите Intrinsics и Height свойства камеры.
sensor = monoCamera(intrinsics,height,Name,Value)monoCamera(intrinsics,1.5,'Pitch',1) создает монокулярный датчик камеры, который составляет 1,5 метра над землей и имеет подачу с 1 степенью к земле. Заключите каждое имя свойства в кавычки.
Intrinsics — Внутренние параметры камерыcameraIntrinsics возразите |
cameraParameters объектВнутренние параметры камеры, заданные как любой cameraIntrinsics или cameraParameters объект. Внутренние параметры камеры включают фокусное расстояние и оптический центр камеры и размер изображения, произведенного камерой.
Можно установить это свойство, когда вы создаете объект. После того, как вы создадите объект, это свойство только для чтения.
Height — Высота с дорожного покрытия на датчик камерыВысота с дорожного покрытия на датчик камеры, заданный как действительный скаляр. Высота является перпендикулярным расстоянием от земли до центра камеры. Задайте высоту в мировых единицах измерения, таких как метры. Чтобы оценить это значение, используйте estimateMonoCameraParameters функция.
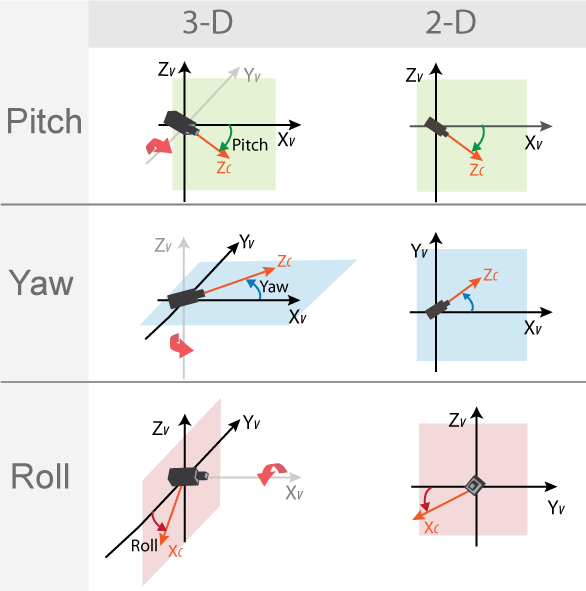
Pitch — Передайте уголПередайте угол между горизонтальной плоскостью транспортного средства и оптической осью камеры, заданной как действительный скаляр в градусах. Чтобы оценить это значение, используйте estimateMonoCameraParameters функция.
Pitch использует соглашение ISO во вращении, с по часовой стрелке положительным угловым направлением при взгляде в положительном направлении Y транспортного средства V осей.
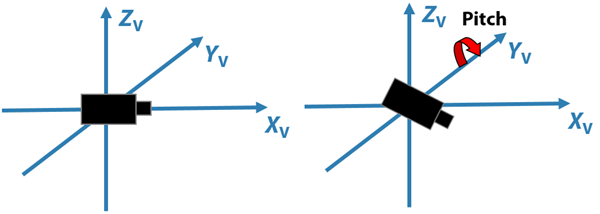
Для получения дополнительной информации смотрите Угловые Направления.
Yaw — Угол отклонения от курсаУгол отклонения от курса между X V осей транспортного средства и оптической осью камеры, заданной как действительный скаляр в градусах. Чтобы оценить это значение, используйте estimateMonoCameraParameters функция.
Yaw использует соглашение ISO во вращении, с по часовой стрелке положительным угловым направлением при взгляде в положительном направлении Z транспортного средства V осей.
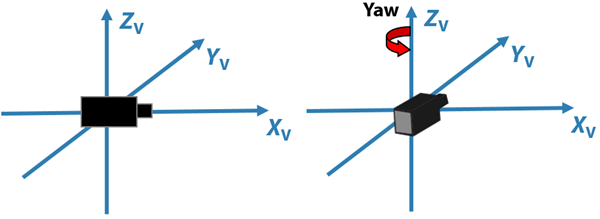
Для получения дополнительной информации смотрите Угловые Направления.
Roll — Угол вращенияУгол вращения камеры вокруг ее оптической оси, возвращенной как действительный скаляр в градусах. Чтобы оценить это значение, используйте estimateMonoCameraParameters функция.
Roll использует соглашение ISO во вращении, с по часовой стрелке положительным угловым направлением при взгляде в положительном направлении X транспортного средства V осей.
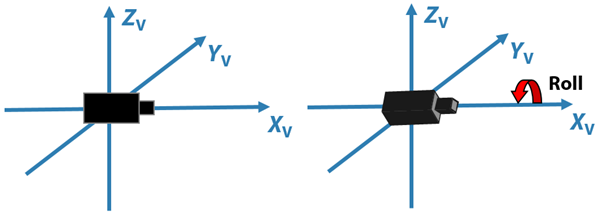
Для получения дополнительной информации смотрите Угловые Направления.
SensorLocation — Местоположение центра датчика камеры Местоположение центра датчика камеры, заданного как двухэлементный вектор формы [x y]
. Используйте это свойство изменить размещение камеры. Модули находятся в системе координат транспортного средства (X V, Y V, Z V).
По умолчанию датчик камеры расположен в (X V, Y V) источник, на высоте, заданной Height.

WorldUnits — Системные модули мировой координаты'meters' | вектор символов | представляет скаляр в виде строкиСистемные модули мировой координаты, заданные как вектор символов или скаляр строки. Это свойство только хранит модульный тип и не влияет ни на какие вычисления. Любой текст допустим.
Можно установить это свойство, когда вы создаете объект. После того, как вы создадите объект, это свойство только для чтения.
imageToVehicle | Преобразуйте координаты изображений, чтобы транспортировать координаты |
vehicleToImage | Преобразуйте координаты транспортного средства, чтобы отобразить координаты |
Создайте монокулярный датчик камеры по ходу движения, смонтированный на автомобиле, оборудованном датчиком. Исследуйте изображение, полученное от камеры, и определите местоположения в изображении и в транспортном средстве и отобразите координаты.
Установите внутренние параметры камеры. Задайте фокусное расстояние, основную точку плоскости изображения и размер выходного изображения. Модули находятся в пикселях. Сохраните внутренние параметры как cameraIntrinsics объект.
focalLength = [800 800]; principalPoint = [320 240]; imageSize = [480 640]; intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
Задайте положение камеры. Позиционируйте камеру 2,18 метра над землей с подачей с 14 степенями к земле.
height = 2.18; pitch = 14;
Задайте монокулярный датчик камеры с помощью внутренних параметров камеры и положения камеры. Загрузите изображение от камеры.
sensor = monoCamera(intrinsics,height,'Pitch',pitch); Ioriginal = imread('road.png'); figure imshow(Ioriginal) title('Original Image')

Определите координаты изображений точки 10 метров непосредственно перед камерой. Ось X указывает вперед от камеры и точек Оси Y налево.
xyVehicleLoc1 = [10 0]; xyImageLoc1 = vehicleToImage(sensor,xyVehicleLoc1)
xyImageLoc1 = 1×2
320.0000 216.2296
Отобразите точку на изображении.
IvehicleToImage = insertMarker(Ioriginal,xyImageLoc1); IvehicleToImage = insertText(IvehicleToImage,xyImageLoc1 + 5,'10 meters'); figure imshow(IvehicleToImage) title('Vehicle-to-Image Point')

Определите координаты транспортного средства точки, которая находится на дорожном покрытии в изображении.
xyImageLoc2 = [300 300]; xyVehicleLoc2 = imageToVehicle(sensor,xyImageLoc2)
xyVehicleLoc2 = 1×2
6.5959 0.1732
Точка составляет приблизительно 6,6 метров перед транспортным средством и приблизительно 0,17 метра слева от центра транспортного средства.
Отобразите координаты транспортного средства точки на изображении.
IimageToVehicle = insertMarker(Ioriginal,xyImageLoc2); displayText = sprintf('(%.2f m, %.2f m)',xyVehicleLoc2); IimageToVehicle = insertText(IimageToVehicle,xyImageLoc2 + 5,displayText); figure imshow(IimageToVehicle) title('Image-to-Vehicle Point')

Создайте датчик видения при помощи монокулярной настройки камеры и сгенерируйте обнаружения от того датчика.
Задайте внутренние параметры камеры и создайте monoCamera объект от этих параметров. Камера смонтирована сверху автомобиля, оборудованного датчиком на высоте 1,5 метров над землей и подаче 1 степени к земле.
focalLength = [800 800];
principalPoint = [320 240];
imageSize = [480 640];
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
height = 1.5;
pitch = 1;
monoCamConfig = monoCamera(intrinsics,height,'Pitch',pitch);Создайте генератор обнаружения видения с помощью монокулярной настройки камеры.
visionSensor = visionDetectionGenerator(monoCamConfig);
Сгенерируйте ведущий сценарий с автомобилем, оборудованным датчиком и двумя целевыми автомобилями. Расположите первый целевой автомобиль 30 метров непосредственно перед автомобилем, оборудованным датчиком. Расположите второй целевой автомобиль 20 метров перед автомобилем, оборудованным датчиком, но возместите налево на 3 метра.
scenario = drivingScenario; egoVehicle = vehicle(scenario); targetCar1 = vehicle(scenario,'Position',[30 0 0]); targetCar2 = vehicle(scenario,'Position',[20 3 0]);
Используйте видимый с большого расстояния график отобразить основы транспортного средства и зону охвата датчика.
figure bep = birdsEyePlot('XLim',[0 50],'YLim',[-20 20]); olPlotter = outlinePlotter(bep); [position,yaw,length,width,originOffset,color] = targetOutlines(egoVehicle); plotOutline(olPlotter,position,yaw,length,width); caPlotter = coverageAreaPlotter(bep,'DisplayName','Coverage area','FaceColor','blue'); plotCoverageArea(caPlotter,visionSensor.SensorLocation,visionSensor.MaxRange, ... visionSensor.Yaw,visionSensor.FieldOfView(1))

Получите положения целевых автомобилей с точки зрения автомобиля, оборудованного датчиком. Используйте эти положения, чтобы сгенерировать обнаружения от датчика.
poses = targetPoses(egoVehicle); [dets,numValidDets] = visionSensor(poses,scenario.SimulationTime);
Отобразитесь (X, Y) положения допустимых обнаружений. Для каждого обнаружения, (X, Y) положения являются первыми двумя значениями Measurement поле .
for i = 1:numValidDets XY = dets{i}.Measurement(1:2); detXY = sprintf('Detection %d: X = %.2f meters, Y = %.2f meters',i,XY); disp(detXY) end
Detection 1: X = 19.09 meters, Y = 2.79 meters Detection 2: X = 27.81 meters, Y = 0.08 meters
В системе координат транспортного средства (X V, Y V, Z V) заданный monoCamera:
V-ось X указывает вперед от транспортного средства.
V-ось Y указывает налево, как просматривается при направлении вперед.
V-ось Z подчеркивает от земли, чтобы обеспечить правую систему координат.
Источник по умолчанию этой системы координат находится на дорожном покрытии, непосредственно ниже центра камеры. Центр камеры задает эту центральную точку.
Чтобы изменить размещение источника в системе координат транспортного средства, обновите SensorLocation свойство.
Для получения дополнительной информации о системе координат транспортного средства, смотрите Системы координат в Automated Driving Toolbox.
Монокулярный датчик камеры использует по часовой стрелке положительные угловые направления при взгляде в положительном направлении Z - Y - и X - оси, соответственно.