Калибровка моно-или стереофотоаппарата
[ возвращает cameraParams,imagesUsed,estimationErrors]
= estimateCameraParameters(imagePoints,worldPoints)cameraParams, cameraParameters объект, содержащий оценки для внутренних и внешних параметров и коэффициентов искажения одной камеры. Функция также возвращает изображения, вы раньше оценивали параметры камеры и стандартные ошибки оценки для одной калибровки фотоаппарата.
[ возвращает stereoParams,pairsUsed,estimationErrors]
= estimateCameraParameters(imagePoints,worldPoints)stereoParams, stereoParameters объект, содержащий параметры стереофотоаппарата. Функция также возвращает изображения, вы раньше оценивали параметры стерео и стандартные ошибки оценки для калибровки стереофотоаппарата.
cameraParams = estimateCameraParameters(___,Name,Value)cameraParams свойства объектов заданы одним или несколькими Name,Value парные аргументы, с помощью любого из предыдущих синтаксисов. Незаданные свойства имеют свои значения по умолчанию.
Создайте набор калибровочных изображений.
images = imageSet(fullfile(toolboxdir('vision'),'visiondata',... 'calibration','mono')); imageFileNames = images.ImageLocation;
Обнаружьте калибровочный шаблон.
[imagePoints, boardSize] = detectCheckerboardPoints(imageFileNames);
Сгенерируйте мировые координаты углов квадратов.
squareSizeInMM = 29; worldPoints = generateCheckerboardPoints(boardSize,squareSizeInMM);
Калибруйте камеру.
I = readimage(images,1); imageSize = [size(I, 1),size(I, 2)]; params = estimateCameraParameters(imagePoints,worldPoints, ... 'ImageSize',imageSize);
Визуализируйте калибровочную точность.
showReprojectionErrors(params);

Визуализируйте значения внешних параметров камеры.
figure; showExtrinsics(params);

drawnow;
Постройте обнаруженные и повторно спроектированные точки.
figure;
imshow(imageFileNames{1});
hold on;
plot(imagePoints(:,1,1), imagePoints(:,2,1),'go');
plot(params.ReprojectedPoints(:,1,1),params.ReprojectedPoints(:,2,1),'r+');
legend('Detected Points','ReprojectedPoints');
hold off;
Задайте калибровочные изображения.
leftImages = imageDatastore(fullfile(toolboxdir('vision'),'visiondata', ... 'calibration','stereo','left')); rightImages = imageDatastore(fullfile(toolboxdir('vision'),'visiondata', ... 'calibration','stereo','right'));
Обнаружьте шахматные доски.
[imagePoints,boardSize] = ...
detectCheckerboardPoints(leftImages.Files,rightImages.Files);Задайте мировые координаты шахматной доски keypoints. Размер квадратов находится в миллиметрах.
squareSize = 108; worldPoints = generateCheckerboardPoints(boardSize,squareSize);
Калибруйте систему стереофотоаппарата. Обе камеры имеют то же разрешение.
I = readimage(leftImages,1); imageSize = [size(I,1),size(I,2)]; params = estimateCameraParameters(imagePoints,worldPoints, ... 'ImageSize',imageSize);
Визуализируйте калибровочную точность.
showReprojectionErrors(params);

Визуализируйте значения внешних параметров камеры.
figure; showExtrinsics(params);

imagePoints — Ключевые пункты калибровочного шаблонаКлючевые пункты калибровочного шаблона, заданного как массив [x, y] внутренний параметр, отображают координаты.
| Калибровка | Входной массив [x, y] ключевые пункты |
|---|---|
| Одна камера | M-by-2-by-numImages массив [x, y] точки.
|
| Стереофотоаппарат | M-by-2-by-numPairs-by-2 массив [x, y] точки.
|
Типы данных: single | double
worldPoints — Ключевые пункты калибровочного шаблона в мировых координатахКлючевые пункты калибровочного шаблона в мировых координатах, заданных как M-by-2 массив количества M [x, y] мировые координаты. Шаблон должен быть плоским; поэтому, z - координаты являются нулем.
Типы данных: single | double
Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
'WorldUnits', 'mm' устанавливает мировые модули точки на миллиметры.'WorldUnits' — Мир указывает модули'mm' (значение по умолчанию) | вектор символов | представляет скаляр в виде строкиМир указывает модули, заданные как разделенная запятой пара, состоящая из 'WorldUnits' и вектор символов или скаляр строки.
'EstimateSkew' — Оценочный скосfalse (значение по умолчанию) | логический скалярОценочный скос, заданный как разделенная запятой пара, состоящая из 'EstimateSkew' и логический скаляр. Когда вы устанавливаете это свойство на true, функция оценивает скос осей изображений. Когда установлено в false, оси изображений точно перпендикулярны, и функция обнуляет скос.
'NumRadialDistortionCoefficients' — Количество радиальных коэффициентов искажения3Количество радиальных коэффициентов искажения, чтобы оценить, заданный как разделенная запятой пара, состоящая из 'NumRadialDistortionCoefficients' и значение 2 или 3. Радиальное искажение происходит, когда световые лучи изгибаются более близкий ребра линзы, чем они делают в ее оптическом центре. Чем меньший линза, тем больше искажение.
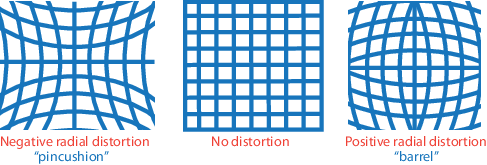
Радиальные коэффициенты искажения моделируют этот тип искажения. Искаженные точки обозначаются как (искаженный x, искаженный y):
x, искаженный = x (1 + k 1*r2 + k 2*r4 + k 3*r6)
y, искаженный = y (1 + k 1*r2 + k 2*r4 + k 3*r6)
x, y Неискаженные пиксельные местоположения. x и y находятся в нормированных координатах изображений. Нормированные координаты изображений вычисляются от пиксельных координат путем перевода в оптический центр и деления на фокусное расстояние в пикселях. Таким образом x и y являются безразмерными.
k 1, k 2, и k 3 — Радиальные коэффициенты искажения линзы.
r2 : x 2 + y 2
Как правило, два коэффициента достаточны для калибровки. Для серьезного искажения, такой как в широкоугольных объективах, можно выбрать 3 коэффициента, чтобы включать k 3.
'EstimateTangentialDistortion' — Тангенциальный флаг искаженияfalse (значение по умолчанию) | логический скаляр Тангенциальный флаг искажения, заданный как разделенная запятой пара, состоящая из, 'EstimateTangentialDistortion' и логический скаляр. Когда вы устанавливаете это свойство на true, функция оценивает тангенциальное искажение. Когда вы устанавливаете его на false, тангенциальное искажение незначительно.
Тангенциальное искажение происходит, когда линза и плоскость изображения не параллельны. Тангенциальные коэффициенты искажения моделируют этот тип искажения.

Искаженные точки обозначаются как (искаженный x, искаженный y):
x, искаженный = x + [2 * p 1 * x * y + p 2 * (r 2 + 2 * x 2)]
y, искаженный = y + [p 1 * (r 2 + 2 *y 2) + 2 * p 2 * x * y]
x, y Неискаженные пиксельные местоположения. x и y находятся в нормированных координатах изображений. Нормированные координаты изображений вычисляются от пиксельных координат путем перевода в оптический центр и деления на фокусное расстояние в пикселях. Таким образом x и y являются безразмерными.
p 1 и p 2 — Тангенциальные коэффициенты искажения линзы.
r2 : x 2 + y 2
[1] Чжан, Z. “Гибкий Новый техник для Калибровки фотоаппарата”. Транзакции IEEE согласно Анализу Шаблона и Искусственному интеллекту. Издание 22, № 11, 2000, стр 1330–1334.
[2] Heikkila, J, и О. Сильвен. “Процедура калибровки фотоаппарата с четырьмя шагами с неявной коррекцией изображений”, международная конференция IEEE по вопросам компьютерного зрения и распознавания образов, 1997.
[3] Bouguet, J.Y. “Тулбокс калибровки фотоаппарата для MATLAB”, вычислительное видение в Калифорнийском технологическом институте. Тулбокс калибровки фотоаппарата для MATLAB.
[4] Брадский, G. и А. Кэехлер. Изучение OpenCV: компьютерное зрение с библиотекой OpenCV. Севастополь, CA: О'Райли, 2008.
