Automated Driving Toolbox™ служит основой co-симуляции, которая моделирует ведущие алгоритмы в Simulink® и визуализирует их производительность в 3D среде. Эта 3D среда симуляции использует Нереальный Engine® от Epic Games®.
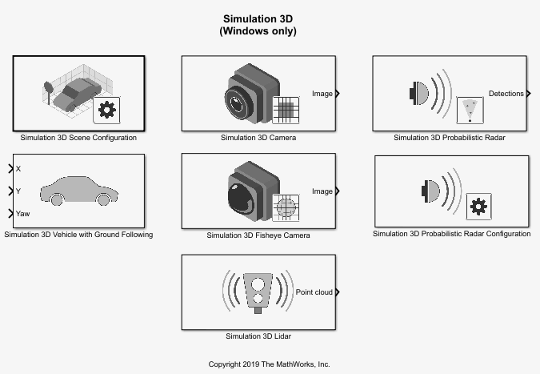
Блоки Simulink, связанные с 3D средой симуляции, могут быть найдены в Automated Driving Toolbox> библиотека блоков Simulation 3D. Эти блоки обеспечивают способность к:
Сконфигурируйте предварительно созданные сцены в 3D среде симуляции.
Поместите и переместите транспортные средства в этих сценах.
Настройте камеру, радар, и лоцируйте датчики на транспортных средствах.
Симулируйте датчик выходные параметры на основе среды вокруг транспортного средства.
Получите достоверные данные для получения информации о глубине и семантической сегментации.
Этот инструмент симуляции обычно используется, чтобы добавить действительные данные при разработке, тестируя и проверяя производительность автоматизированных ведущих алгоритмов. В сочетании с моделью транспортного средства можно использовать эти блоки, чтобы выполнить реалистические симуляции с обратной связью, которые охватывают целый автоматизированный ведущий стек от восприятия, чтобы управлять.
Для получения дополнительной информации о среде симуляции смотрите Как 3D Симуляция для Автоматизированных Ведущих работ.
Получить доступ к библиотеке Automated Driving Toolbox> Simulation 3D, в командной строке MATLAB®, введите:
drivingsim3d
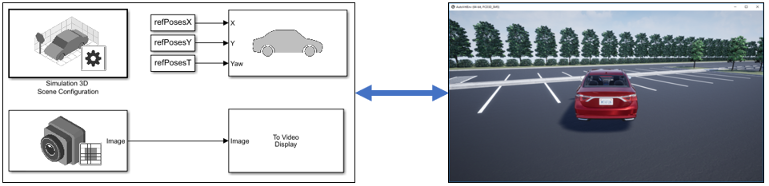
Чтобы сконфигурировать модель к co-simulate с 3D средой симуляции, добавьте блок Simulation 3D Scene Configuration в модель. Используя этот блок, можно выбрать из набора предварительно созданных 3D сцен, где можно протестировать и визуализировать ведущие алгоритмы. Следующее изображение от Виртуальной сцены Макити.

Тулбокс включает эти сцены.
| Сцена | Описание |
|---|---|
| Straight Road | Прямой дорожный сегмент |
| Curved Road | Кривая, циклично выполненная дорога |
| Parking Lot | Пустая парковка |
| Двойное изменение маршрута | Стрэайт-Роуд с баррелями и дорожными знаками, которые настраиваются для выполнения двойного маневра изменения маршрута |
| Открытая поверхность | Плоский, черный тротуар появляется без дорожных объектов |
| Городской квартал США | Городской квартал с несколькими пересечениями |
| Магистраль США | Магистраль с конусами, барьерами, животным, светофором и дорожными знаками |
| Большая парковка | Парковка с припаркованными автомобилями, конусами, ограничениями и дорожными знаками |
| Виртуальный Макити | Городская среда, которая представляет открытую демонстрационную площадку Мичиганского университета (см. Тестовое Средство Макити); включает конусы, барьеры, животное, светофор и дорожные знаки |
Чтобы задать виртуальное транспортное средство в сцене, добавьте блок Simulation 3D Vehicle with Ground Following в свою модель. Используя этот блок, можно управлять перемещением транспортного средства путем предоставления этих X, Y, и значений отклонения от курса, которые задают его положение и ориентацию на каждом временном шаге. Транспортное средство автоматически проходит земля.
Можно также задать цвет и тип транспортного средства. Тулбокс включает эти типы транспортного средства:
Можно задать виртуальные датчики и присоединить их в различных позициях по транспортным средствам. Тулбокс включает их моделирование датчика и блоки Configuration.
| Блок | Описание |
|---|---|
| Simulation 3D Camera | Модель камеры с линзой. Включает параметры для размера изображения, фокусного расстояния, искажения и скоса. |
| Simulation 3D Fisheye Camera | Fisheye-камера, которая может быть описана с помощью модели камеры Scaramuzza. Включает параметры для центра искажения, размера изображения и коэффициентов отображения. |
| Simulation 3D Lidar | Сканирование модели датчика лидара. Включает параметры для области значений обнаружения, разрешения и полей зрения. |
| Simulation 3D Probabilistic Radar | Вероятностная радарная модель, которая возвращает список обнаружений. Включает параметры для радарной точности, радарного смещения, вероятности обнаружения и создания отчетов обнаружения. Это не симулирует радар на уровне распространения электромагнитной волны. |
| Simulation 3D Probabilistic Radar Configuration | Конфигурирует радарные подписи для всех агентов, обнаруженных блоками Simulation 3D Probabilistic Radar в модели. |
Для получения дополнительной информации о выборе датчика смотрите, Выбирают Sensor для 3D Симуляции.
Automated Driving Toolbox 3D блоки симуляции обеспечивает инструменты для тестирования и визуализации планирования пути, управления транспортным средством и алгоритмов восприятия.
Можно использовать 3D среду симуляции, чтобы визуализировать движение транспортного средства в предварительно созданной сцене. Эта среда предоставляет вам способ анализировать производительность алгоритмов управления транспортного средства и планирования пути. После разработки этих алгоритмов в Simulink можно использовать drivingsim3d библиотека, чтобы визуализировать движение транспортного средства в одной из предварительно созданных сцен.
Для примера планирования пути и визуализации алгоритма управления транспортного средства, смотрите, Визуализируют Автоматизированного Камердинера Парковки Используя 3D Симуляцию.
Automated Driving Toolbox обеспечивает несколько блоков для подробной камеры, радара и моделирования датчика лидара. Путем монтирования этих датчиков на транспортных средствах в виртуальной среде можно сгенерировать синтетические данные о датчике или обнаружения датчика, чтобы проверить производительность моделей датчика против алгоритмов восприятия.
Для примера создания алгоритма восприятия лидара с помощью синтетических данных о датчике из 3D среды симуляции смотрите, Симулируют Алгоритм Восприятия Датчика Лидара.
Для примера генерации радарных обнаружений смотрите, Симулируют Радарные Датчики в 3D Среде.
Можно также вывести и визуализировать достоверные данные, чтобы подтвердить алгоритмы оценки глубины и обучить сети семантической сегментации. Для примера смотрите, Визуализируют Глубину и Данные о Семантической Сегментации в 3D Среде.
После того, как вы проектируете и тестируете систему восприятия в 3D среде симуляции, можно затем использовать ее, чтобы управлять системой управления, которая на самом деле ведет транспортное средство. В этом случае, вместо того, чтобы вручную настроить траекторию, транспортное средство использует систему восприятия, чтобы управлять собой. Путем объединения восприятия и управления в систему с обратной связью в 3D среде симуляции, можно разработать и протестировать более комплексные алгоритмы, такие как хранение маршрута помогают и адаптивный круиз-контроль.
Для примера, который обсуждает симуляцию с обратной связью в 3D среде, см. Проект Детектора Маркера Маршрута в 3D Среде симуляции.
