Сгенерируйте инфракрасные обнаружения для отслеживания сценария
irSensor Система object™ создает статистическую модель для генерации обнаружений с помощью инфракрасных датчиков. Можно использовать irSensor объект в сценарии, что перемещение моделей и стационарные платформы с помощью trackingScenario. Датчик может симулировать действительные обнаружения с добавленным случайным шумом и также сгенерировать ложные сигнальные обнаружения. Кроме того, можно использовать этот объект создать вход к средствам отслеживания, таким как trackerGNN, trackerJPDA или trackerTOMHT.
Этот объект позволяет вам сконфигурировать механически датчик сканирования. Инфракрасное излучение, сканируя датчик изменяет угол взгляда между обновлениями путем продвижения механического положения луча с шагом углового промежутка, заданного в FieldOfView свойство. Инфракрасный датчик сканирует общую область в азимуте и вертикальном изменении, заданном MechanicalScanLimits свойство. Если пределы сканирования для азимута или вертикального изменения устанавливаются к [0 0], никакое сканирование не выполняется по тому измерению для того режима сканирования. Кроме того, если максимальная частота развертки для азимута или вертикального изменения обнуляется, никакое сканирование не выполняется по тому измерению.
Сгенерировать инфракрасные обнаружения:
Создайте irSensor объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
sensor = irSensor(SensorIndex)SensorIndex, и значения свойств по умолчанию.
sensor = irSensor(SensorIndex,'No scanning')irSensor это смотрит вдоль направления опорного направления датчика. Никакое механическое сканирование не выполняется. Этот синтаксис устанавливает ScanMode свойство к 'No scanning'.
sensor = irSensor(SensorIndex,'Raster')irSensor возразите, что механически сканирует растровый шаблон. Растровый промежуток составляет 90 ° в азимуте от-45 ° до +45 ° и в вертикальном изменении от горизонта до на 10 ° выше горизонта. Смотрите Синтаксисы Удобства для свойств, установленных этим синтаксисом.
sensor = irSensor(SensorIndex,'Rotator')irSensor возразите, что механически сканирует 360 ° в азимуте путем электронного вращения датчика на постоянном уровне. Когда вы устанавливаете HasElevation к true, инфракрасный датчик механически указывает на центр поля зрения вертикального изменения. Смотрите Синтаксисы Удобства для свойств, установленных этим синтаксисом.
sensor = irSensor(SensorIndex,'Sector')irSensor возразите, что механически сканирует сектор азимута на 90 ° от-45 ° до +45 °. Установка HasElevation к true, указывает инфракрасный датчик к центру поля зрения вертикального изменения. Лучи сложены механически, чтобы обработать целое вертикальное изменение, заполненное пределами сканирования на сингле, живут. Смотрите Синтаксисы Удобства для свойств, установленных этим синтаксисом.
sensor = irSensor(___,Name,Value)irSensor(1,'UpdateRate',1,'CutoffFrequency',20e3) создает инфракрасный датчик, который сообщает об обнаружениях в частоте обновления 1 Гц и частоте среза 20 кГц. Если вы задаете индекс датчика с помощью SensorIndex свойство, можно не использовать SensorIndex входной параметр.
dets
= sensor(targets,ins,simTime)ins, для платформы датчика. Информация о INS используется путем отслеживания и алгоритмы сплава, чтобы оценить целевые положения в системе координат NED.
Чтобы включить этот синтаксис, установите HasINS свойство к true.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Датчик измеряет координаты цели. Measurement и MeasurementNoise о значениях сообщают в системе координат, заданной DetectionCoordinates свойство датчика.
Когда DetectionCoordinates свойством является 'Scenario', 'Body', или 'Sensor rectangular', Measurement и MeasurementNoise о значениях сообщают в прямоугольных координатах. О скоростях только сообщают когда свойство уровня области значений, HasRangeRate, true.
Когда DetectionCoordinates свойством является 'Sensor spherical', Measurement и MeasurementNoise о значениях сообщают в сферической системе координат, выведенной из системы прямоугольной координаты датчика. О вертикальном изменении и уровне области значений только сообщают когда HasElevation и HasRangeRate true.
Измерения упорядочены как [азимут, вертикальное изменение, область значений, уровень области значений]. Создание отчетов вертикального изменения и уровня области значений зависит от соответствующего HasElevation и HasRangeRate значения свойств. Углы в градусах, область значений исчисляется в метрах, и уровень области значений исчисляется в метрах в секунду.
Координаты измерения
| DetectionCoordinates | Измерение и координаты шума измерения | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
'Scenario' | Координатная зависимость от
| |||||||||||||||
'Body' | ||||||||||||||||
'Sensor rectangular' | ||||||||||||||||
'Sensor spherical' | Координатная зависимость от
|
MeasurementParameters свойство состоит из массива структур, которые описывают последовательность координатных преобразований от дочерней системы координат до родительской системы координат или обратных преобразований (см. Вращение Системы координат). В большинстве случаев самой длинной необходимой последовательностью преобразований является Датчик → Платформа → Сценарий.
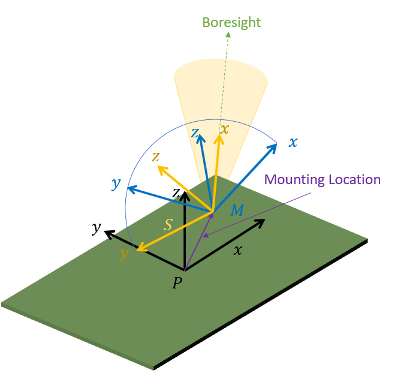
Если об обнаружениях сообщают в сферических координатах датчика и HasINS установлен в false, затем последовательность состоит только из одного преобразования от датчика до платформы. В преобразовании, OriginPosition то же самое как MountingLocation свойство датчика. Orientation состоит из двух последовательных вращений. Первое вращение, соответствуя MountingAngles свойство датчика, составляет вращение от системы координат платформы (P) к датчику, монтирующему систему координат (M). Второе вращение, соответствуя азимуту и углам вертикального изменения датчика, составляет вращение от датчика, монтирующего систему координат (M) к датчику, сканируя систему координат (S). В системе координат S направление x является направлением опорного направления, и направление y находится в x-y плоскость датчика, монтирующего систему координат (M).
Если HasINS true, последовательность преобразований состоит из двух преобразований – сначала формируют систему координат сценария к системе координат платформы затем от системы координат платформы до системы координат сканирования датчика. В первом преобразовании, Orientation вращение от системы координат сценария до системы координат платформы и OriginPosition положение системы координат платформы относительно системы координат сценария.
Тривиально, если об обнаружениях сообщают в прямоугольных координатах платформы и HasINS установлен в false, преобразование состоит только из идентичности.
Поля MeasurementParameters показаны здесь. Не все поля должны присутствовать в структуре. Набор полей и их значений по умолчанию может зависеть от типа датчика.
| Поле | Описание |
Frame | Перечислимый тип, указывающий на систему координат раньше, сообщал об измерениях. Когда об обнаружениях сообщают с помощью системы прямоугольной координаты, |
OriginPosition | Смещение положения источника дочерней системы координат относительно родительской системы координат, представленной как вектор 3 на 1. |
OriginVelocity | Скоростное смещение источника дочерней системы координат относительно родительской системы координат, представленной как вектор 3 на 1. |
Orientation | 3х3 ортонормированная матрица вращения системы координат с действительным знаком. Направление вращения зависит от |
IsParentToChild | Логический скаляр, указывающий, если |
HasElevation | Логический скаляр, указывающий, включено ли вертикальное изменение в измерение. Для измерений, о которых сообщают в прямоугольной системе координат, и если |
HasAzimuth | Логический скаляр, указывающий, включен ли азимут в измерение. |
HasRange | Логический скаляр, указывающий, включена ли область значений в измерение. |
HasVelocity | Логический скаляр, указывающий, включают ли обнаружения, о которых сообщают, скоростные измерения. Для измерений, о которых сообщают в прямоугольной системе координат, если |
Атрибуты объектов содержат дополнительную информацию об обнаружении:
| Атрибут | Описание |
TargetIndex | Идентификатор платформы, |
SNR | Отношение сигнал-шум обнаружения в дБ. |
