Соедините вероятностное средство отслеживания ассоциации данных
trackerJPDA Система object™ является средством отслеживания, способным к обработке обнаружений нескольких целей от нескольких датчиков. Использование средства отслеживания соединяет вероятностную ассоциацию данных, чтобы присвоить обнаружения каждой дорожке. Средство отслеживания применяет мягкое присвоение, где несколько обнаружений могут способствовать каждой дорожке. Средство отслеживания инициализирует, подтверждает, корректирует, предсказывает (выполняет каботажное судоходство), и удаляет дорожки. Входные параметры к средству отслеживания являются отчетами обнаружения, сгенерированными objectDetection, radarSensor, monostaticRadarSensor, irSensor, или sonarSensor объекты. Средство отслеживания оценивает вектор состояния и оценочную ошибочную ковариационную матрицу состояния для каждой дорожки. Каждое обнаружение присвоено по крайней мере одной дорожке. Если обнаружение не может быть присвоено никакой существующей дорожке, средство отслеживания создает новый трек.
Любой новый трек запускается в предварительном состоянии. Если достаточно обнаружений присвоено предварительной дорожке, ее изменениям состояния в подтвержденном (см. ConfirmationThreshold свойство. Если обнаружение уже имеет известную классификацию (т.е. ObjectClassID поле возвращенной дорожки является ненулевым), что соответствующая дорожка сразу подтверждена. Когда дорожка подтверждена, средство отслеживания полагает, что дорожка представляет физический объект. Если обнаружения не присвоены дорожке в specifiable количестве обновлений, дорожка удалена.
Отслеживать цели с помощью этого объекта:
Создайте trackerJPDA объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
tracker = trackerJPDAtrackerJPDA Системный объект со значениями свойств по умолчанию.
tracker = trackerJPDA(Name,Value)trackerJPDA('FilterInitializationFcn',@initcvukf,'MaxNumTracks',100) создает мультиобъектное средство отслеживания, которое использует постоянную скорость, сигма-точечный фильтр Калмана и позволяет максимум 100 дорожек. Заключите каждое имя свойства в кавычки.
Если в противном случае не обозначено, свойства являются ненастраиваемыми, что означает, что вы не можете изменить их значения после вызова объекта. Объекты блокируют, когда вы вызываете их и release функция разблокировала их.
Если свойство является настраиваемым, можно изменить его значение в любое время.
Для получения дополнительной информации об изменении значений свойств смотрите Разработку системы в MATLAB Используя Системные объекты (MATLAB).
TrackerIndex — Уникальный идентификатор средства отслеживанияУникальный идентификатор средства отслеживания, заданный как неотрицательное целое число. Это свойство используется в качестве SourceIndex в средстве отслеживания выходные параметры, и отличают дорожки, которые прибывают из различных средств отслеживания в системе нескольких-средств-отслеживания. Необходимо задать это свойство как положительное целое число, чтобы использовать дорожку выходные параметры в качестве входных параметров к термофиксатору дорожки.
Пример 1
FilterInitializationFcn — Отфильтруйте функцию инициализации@initcvekf (значение по умолчанию) | указатель на функцию | вектор символовОтфильтруйте функцию инициализации, определенный функцией указатель или как вектор символов, содержащий имя допустимой функции инициализации фильтра. Средство отслеживания использует функцию инициализации фильтра при создании новых треков.
Sensor Fusion and Tracking Toolbox™ предоставляет много функций инициализации, которые можно использовать, чтобы задать FilterInitializationFcn для trackerJPDA объект.
| Функция инициализации | Функциональное определение |
|---|---|
initcvkf | Инициализируйте постоянную скорость линейный Фильтр Калмана. |
initcakf | Инициализируйте постоянное ускорение линейный Фильтр Калмана. |
initcvabf | Инициализируйте фильтр альфы - беты постоянной скорости |
initcaabf | Инициализируйте фильтр альфы - беты постоянного ускорения |
initcvekf | Инициализируйте расширенный Фильтр Калмана постоянной скорости. |
initcaekf | Инициализируйте расширенный Фильтр Калмана постоянного ускорения. |
initrpekf | Инициализируйте постоянную скорость параметризованный областью значений расширенный Фильтр Калмана. |
initapekf | Инициализируйте постоянную скорость параметризованный углом расширенный Фильтр Калмана. |
initctekf | Инициализируйте расширенный Фильтр Калмана постоянной угловой скорости вращения. |
initcackf | Инициализируйте фильтр кубатуры постоянного ускорения. |
initctckf | Инициализируйте фильтр кубатуры постоянной угловой скорости вращения. |
initcvckf | Инициализируйте фильтр кубатуры постоянной скорости. |
initcvukf | Инициализируйте сигма-точечный фильтр Калмана постоянной скорости. |
initcaukf | Инициализируйте сигма-точечный фильтр Калмана постоянного ускорения. |
initctukf | Инициализируйте сигма-точечный фильтр Калмана постоянной угловой скорости вращения. |
initcvmscekf | Инициализируйте расширенный Фильтр Калмана постоянной скорости в модифицированных сферических координатах. |
initekfimm | Инициализируйте отслеживание фильтр IMM. |
Можно также записать собственной функции инициализации использование следующего синтаксиса:
filter = filterInitializationFcn(detection)
objectDetection. Выход этой функции должен быть объектом фильтра: trackingKF, trackingEKF, trackingUKF, trackingCKF, trackingGSF, trackingIMM, trackingMSCEKF, или trackingABF.
Для руководства в записи этой функции используйте type команда, чтобы исследовать детали встроенных в MATLAB® функций. Например:
typeinitcvekf
trackerJPDA не принимает все функции инициализации фильтра в Sensor Fusion and Tracking Toolbox. Полный список функций инициализации фильтра, доступных в Sensor Fusion and Tracking Toolbox, дан в разделе Initialization Фильтров Оценки.
Типы данных: function_handle | char
EventGenerationFcn — Выполнимая объединенная функция генерации событий@jpdaEvents (значение по умолчанию) | указатель на функцию | вектор символовВыполнимая объединенная функция генерации событий, определенный функцией указатель или как вектор символов, содержащий имя выполнимой объединенной функции генерации событий. Функция генерации генерирует выполнимые объединенные матрицы события от допустимых событий (обычно даваемый матрицей валидации) сценария отслеживания. Матрица валидации является бинарной матрицей, перечисляющей все возможные ассоциации обнаружений к дорожке. Для получения дополнительной информации смотрите jpadEvents.
Можно также записать собственную функцию генерации. Функция должна иметь следующий синтаксис:
FJE = myfunction(ValidationMatrix)
jpdaEvents. Для руководства в записи этой функции используйте type команда, чтобы исследовать детали jpdaEvents:
type jpdaEventsПример:
@myfunction или 'myfunction'
Типы данных: function_handle | char
MaxNumTracks — Максимальное количество дорожекМаксимальное количество дорожек, которые средство отслеживания может обеспечить, заданный как положительное целое число.
Типы данных: single | double
MaxNumSensors — Максимальное количество датчиковМаксимальное количество датчиков, которые могут быть соединены со средством отслеживания, задало как положительное целое число. MaxNumSensors должен быть больше или быть равен самому большому значению SensorIndex найденный во всех обнаружениях раньше обновлял средство отслеживания. SensorIndex свойство objectDetection объект. MaxNumSensors свойство определяет сколько наборов ObjectAttributes каждая дорожка может иметь.
Типы данных: single | double
StateParameters — Параметры дорожки утверждают систему координатstruct([]) (значение по умолчанию) | struct | struct arrayПараметры дорожки утверждают систему координат, заданную как struct или массив структур. Используйте это свойство задать систему координат состояния дорожки и как преобразовать дорожку от средства отслеживания (названный источником) система координат к системе координат термофиксатора.
Это свойство является настраиваемым.
Типы данных: struct
AssignmentThreshold — Порог присвоения обнаружения30*[1 Inf] (значение по умолчанию) | положительная скалярная величина | 1 2 вектор положительных значенийПорог присвоения обнаружения (или порог пропускания), заданный как положительная скалярная величина или 1 2 вектор [C 1,C2], где C 1 ≤ C 2. Если задано как скаляр, заданное значение, val, расширено до [val, Inf].
Первоначально, средство отслеживания выполняет крупную оценку для нормированного расстояния между всеми дорожками и обнаружениями. Средство отслеживания только вычисляет точное нормированное расстояние для комбинаций, крупное нормированное расстояние которых меньше C 2. Кроме того, средство отслеживания может только присвоить обнаружение дорожке, если точное нормированное расстояние между ними меньше C 1. Смотрите distance функция используется с отслеживанием фильтров (таких как trackingCKF и trackingEKF) для объяснения расчета расстояния.
Советы:
Увеличьте значение C 2, если существует дорожка и комбинации обнаружения, которые должны быть вычислены для присвоения, но не являются. Уменьшите это значение, если расчет стоимости занимает слишком много времени.
Увеличьте значение C 1, если существуют обнаружения, которые должны быть присвоены дорожкам, но не являются. Уменьшите это значение, если существуют обнаружения, которые присвоены дорожкам, которым они не должны быть присвоены (слишком далеко).
DetectionProbability — Вероятность обнаруженияВероятность обнаружения, заданного как скаляр в области значений [0,1]. Это свойство используется в вычислениях крайних апостериорных вероятностей ассоциации и вероятности существования дорожки при инициализации и обновлении дорожки.
Пример: 0.85
Типы данных: single | double
InitializationThreshold — Порог, чтобы инициализировать дорожкуПорог вероятности, чтобы инициализировать новый трек, заданный как скаляр в области значений [0,1]. Если вероятности соединения обнаружения с какой-либо из существующих дорожек все меньше, чем InitializationThreshold, обнаружение будет использоваться, чтобы инициализировать новый трек. Это позволяет обнаружения, которые являются в логическом элементе валидации дорожки, но имеют вероятность ассоциации ниже, чем порог инициализации, чтобы породить новый трек.
Пример: 0.1
Типы данных: single | double
TrackLogic — Отследите тип логики подтверждения и удаления'History' (значение по умолчанию) | 'Integrated'Подтверждение и тип логики удаления, заданный как:
'History' – Отследите подтверждение, и удаление основано на числе раз, дорожка была присвоена обнаружению в последних обновлениях средства отслеживания.
'Integrated' – Отследите подтверждение, и удаление основано на вероятности существования дорожки, которое интегрировано в функции присвоения.
ConfirmationThreshold — Порог для подтверждения дорожкиПорог для подтверждения дорожки, заданного как скаляр или 1 2 вектор. Порог зависит от типа логики подтверждения и удаления дорожки, которую вы устанавливаете с TrackLogic свойство:
'History' – Задайте порог подтверждения как 1 2 вектор [M
N]. Дорожка подтверждена, если она записала, по крайней мере, хиты M в последних обновлениях N. trackerJPDA указывает хит по логике истории дорожки согласно HitMissThrehold. Значением по умолчанию является [2 3].
'Integrated' – Задайте порог подтверждения как скаляр. Дорожка подтверждена, если ее вероятность существования больше или равна порогу подтверждения. Значением по умолчанию является 0.95.
Типы данных: single | double
DeletionThreshold — Порог для удаления дорожкиПорог для удаления дорожки, заданного как скаляр или с действительным знаком 1 2 вектор. Порог зависит от типа логики подтверждения и удаления дорожки, которую вы устанавливаете с TrackLogic свойство:
'History' – Задайте порог подтверждения как [P
R]. Дорожка удалена, если она записала, по крайней мере, P промахи в последних обновлениях R . trackerJPDA укажет мисс по логике истории дорожки согласно HitMissThrehold свойство. Значением по умолчанию является [5,5].
'Integrated' – Задайте порог удаления как скаляр. Дорожка удалена, если ее вероятность существования опускается ниже порога. Значением по умолчанию является 0.1.
Пример: 0.2 или [5,6]
Типы данных: single | double
HitMissThreshold — Порог для регистрации как попалоПорог для регистрации случайного, заданного как скаляр в области значений [0,1]. Логика истории дорожки укажет мисс, и дорожка будет курсироваться, если сумма безусловных вероятностей присвоений будет ниже HitMissThreshold. В противном случае логика истории дорожки укажет хит.
Пример: 0.3
Чтобы включить этот аргумент, установите TrackLogic свойство к 'History'.
Типы данных: single | double
ClutterDensity — Пространственная плотность измерений помехи1e-6 (значение по умолчанию) | положительная скалярная величинаПространственная плотность измерений помехи, заданных как положительная скалярная величина. Плотность помехи описывает ожидаемое количество ложных положительных обнаружений на единичный объем. Это используется в качестве параметра модели помехи Пуассона. Когда TrackLogic установлен в 'Integrated', ClutterDensity также используется в вычислении начальной вероятности существования дорожки.
Пример: 1e-5
Типы данных: single | double
NewTargetDensity — Пространственная плотность новых целей1e-5 (значение по умолчанию) | положительная скалярная величинаПространственная плотность новых целей, заданных как положительная скалярная величина. Новая целевая плотность описывает ожидаемое количество новых треков на единичный объем на пробеле измерения. Это используется в вычислении вероятности существования дорожки во время инициализации дорожки.
Пример: 1e-3
Чтобы включить этот аргумент, установите TrackLogic свойство к 'Integrated'.
Типы данных: single | double
DeathRate — Уровень времени целевых смертельных случаевУровень времени целевых смертельных случаев, заданных как скаляр в области значений [0,1]. DeathRate описывает вероятность, с которой исчезают истинные цели. Это связано с распространением вероятности существования дорожки (PTE):
![]()
где δt является временным интервалом с предыдущего раза обновления t.
Чтобы включить этот аргумент, установите TrackLogic свойство к 'Integrated'.
Типы данных: single | double
InitialExistenceProbability — Начальная вероятность существования дорожкиЭто свойство доступно только для чтения.
Начальная вероятность существования дорожки, заданного как скаляр в области значений [0,1] и вычисленный как InitialExistenceProbability = NewTargetDensity*DetectionProbability/(ClutterDensity + NewTargetDensity*DetectionProbability).
Чтобы включить это свойство, установите TrackLogic свойство к 'Integrated'. Когда TrackLogic свойство установлено в 'History', это свойство не доступно.
Типы данных: single | double
HasCostMatrixInput — Включите матричный вход стоимостиfalse (значение по умолчанию) | trueВключите матрицу стоимости, заданную как false или true. Если true, можно обеспечить матрицу стоимости присвоения как входной параметр при вызове объекта.
Типы данных: логический
HasDetectableTrackIDsInput — Включите вход обнаруживаемых идентификаторов дорожкиfalse (значение по умолчанию) | trueВключите вход обнаруживаемых идентификаторов дорожки при каждом обновлении объекта, заданном как false или true. Установите это свойство на true если вы хотите предоставить список обнаруживаемых идентификаторов дорожки. Этот список сообщает средству отслеживания всех дорожек, что датчики, как ожидают, обнаружат и, опционально, вероятность обнаружения для каждой дорожки.
Типы данных: логический
NumTracks — Количество дорожек обеспечено средством отслеживанияЭто свойство доступно только для чтения.
Количество дорожек обеспечено средством отслеживания, возвращенным как неотрицательное целое число.
Типы данных: single | double
NumConfirmedTracks — Количество подтвержденных дорожекЭто свойство доступно только для чтения.
Количество подтвержденных дорожек, возвращенных как неотрицательное целое число. Если IsConfirmed полем выходной структуры дорожки является true, дорожка подтверждена.
Типы данных: single | double
TimeTolerance — Абсолютный допуск времени между обнаружениями1e-5 (значение по умолчанию) | положительная скалярная величинаАбсолютный допуск времени между обнаружениями для того же датчика, заданного как положительная скалярная величина. Идеально, trackerJPDA ожидает, что обнаружения из датчика будут иметь идентичные метки времени. Однако, если различия в метках времени между обнаружениями датчика в поле, заданном TimeTolerance, эти обнаружения будут использоваться, чтобы обновить оценку дорожки на основе среднего времени этих обнаружений.
Типы данных: double
Чтобы обработать обнаружения и дорожки обновления, вызовите средство отслеживания с аргументами, как будто это была функция (описанный здесь).
confirmedTracks = tracker(detections,time)time.
confirmedTracks = tracker(detections,time,costMatrix)
Чтобы включить этот синтаксис, установите HasCostMatrixInput свойство к true.
confirmedTracks = tracker(___,detectableTrackIDs)detectableTrackIDs. Этот аргумент может использоваться с любым из предыдущих входных синтаксисов.
Чтобы включить этот синтаксис, установите HasDetectableTrackIDsInput свойство к true.
[ также возвращает список предварительных дорожек и список всех дорожек. Можно комбинировать с любым синтаксом из перечисленных выше.confirmedTracks,tentativeTracks,allTracks] = tracker(___)
[ также возвращает информацию об анализе, которая может использоваться в анализе дорожки. Можно комбинировать с любым синтаксом из перечисленных выше.confirmedTracks,tentativeTracks,allTracks,analysisInformation] = tracker(___)
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Создайте объект trackerJPDA с постоянной скоростью по умолчанию, Расширенный Фильтр Калмана и 'История' отслеживают логику. Установите AssignmentThreshold на 100 позволять дорожкам быть совместно сопоставленными.
tracker = trackerJPDA('TrackLogic','History', 'AssignmentThreshold',100,... 'ConfirmationThreshold', [4 5], ... 'DeletionThreshold', [10 10]);
Задайте истинные исходные положения и скорости двух объектов.
pos_true = [0 0 ; 40 -40 ; 0 0]; V_true = 5*[cosd(-30) cosd(30) ; sind(-30) sind(30) ;0 0];
Создайте театральный график визуализировать дорожки и обнаружения.
tp = theaterPlot('XLimits',[-1 150],'YLimits',[-50 50]); trackP = trackPlotter(tp,'DisplayName','Tracks','MarkerFaceColor','g','HistoryDepth',0); detectionP = detectionPlotter(tp,'DisplayName','Detections','MarkerFaceColor','r');
![]()
Чтобы получить положение и скорость, создайте селекторы положения и скорости.
positionSelector = [1 0 0 0 0 0; 0 0 1 0 0 0; 0 0 0 0 0 0]; % [x, y, 0] velocitySelector = [0 1 0 0 0 0; 0 0 0 1 0 0; 0 0 0 0 0 0 ]; % [vx, vy, 0]
Обновите средство отслеживания с обнаружениями, стоимостью отображения и безусловной вероятностью информации об ассоциации, и визуализируйте дорожки с обнаружениями.
dt = 0.2; for time = 0:dt:30 % Update the true positions of objects. pos_true = pos_true + V_true*dt; % Create detections of the two objects with noise. detection(1) = objectDetection(time,pos_true(:,1)+1*randn(3,1)); detection(2) = objectDetection(time,pos_true(:,2)+1*randn(3,1)); % Step the tracker through time with the detections. [confirmed,tentative,alltracks,info] = tracker(detection,time); % Extract position, velocity and label info. [pos,cov] = getTrackPositions(confirmed,positionSelector); vel = getTrackVelocities(confirmed,velocitySelector); meas = cat(2,detection.Measurement); measCov = cat(3,detection.MeasurementNoise); % Update the plot if there are any tracks. if numel(confirmed)>0 labels = arrayfun(@(x)num2str([x.TrackID]),confirmed,'UniformOutput',false); trackP.plotTrack(pos,vel,cov,labels); end detectionP.plotDetection(meas',measCov); drawnow; % Display the cost and marginal probability of distribution every eight % seconds. if time>0 && mod(time,8) == 0 disp(['At time t = ' num2str(time) ' seconds,']); disp('The cost of assignment was: ') disp(info.CostMatrix); disp(['Number of clusters: ' num2str(numel(info.Clusters))]); if numel(info.Clusters) == 1 disp('The two tracks were in the same cluster.') disp('Marginal probabilities of association:') disp(info.Clusters{1}.MarginalProbabilities) end disp('-----------------------------') end end
At time t = 8 seconds,
The cost of assignment was:
1.0e+03 *
0.0020 1.1523
1.2277 0.0053
Number of clusters: 2
-----------------------------
At time t = 16 seconds,
The cost of assignment was:
1.3968 4.5123
2.0747 1.9558
Number of clusters: 1
The two tracks were in the same cluster.
Marginal probabilities of association:
0.8344 0.1656
0.1656 0.8344
0.0000 0.0000
-----------------------------
At time t = 24 seconds,
The cost of assignment was:
1.0e+03 *
0.0018 1.2962
1.2664 0.0013
Number of clusters: 2
-----------------------------
![]()
В типичном рабочем процессе для системы слежения средство отслеживания должно определить, может ли обнаружение быть сопоставлено с какой-либо из существующих дорожек. Если средство отслеживания только обеспечивает одну дорожку, присвоение может быть сделано путем оценки логического элемента валидации вокруг предсказанного измерения и решения, находится ли измерение в пределах логического элемента валидации. На пробеле измерения логический элемент валидации является пространственным контуром, таким как 2D эллипс или 3-D эллипсоид, сосредоточенный при предсказанном измерении. Логический элемент валидации задан с помощью информации о вероятности (оценка состояния и ковариация, например) существующей дорожки, такой, что правильные или идеальные обнаружения имеют высокую вероятность (97%-я вероятность, например) нахожения в пределах этого логического элемента валидации.
Однако, если средство отслеживания обеспечивает несколько дорожек, процесс ассоциации данных становится более сложным, потому что одно обнаружение может находиться в пределах логических элементов валидации нескольких дорожек. Например, в следующем рисунке, T дорожек 1 и T 2 активно обеспечен в средстве отслеживания, и у каждого из них есть свой собственный логический элемент валидации. Начиная с обнаружения D 2 находится в пересечении логических элементов валидации и T 1 и T 2, две дорожки (T 1 и T 2) соединяются и формируют кластер. Кластер является набором связанных дорожек и их связанных обнаружений.
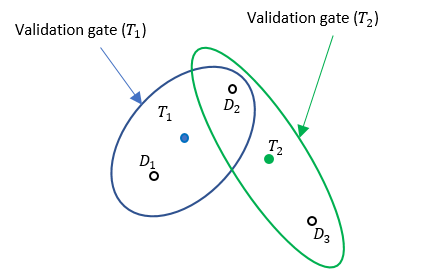
Чтобы представлять отношение ассоциации в кластере, матрица валидации обычно используется. Каждая строка матрицы валидации соответствует обнаружению, в то время как каждый столбец соответствует дорожке. Чтобы составлять возможность каждого обнаружения, являющегося помехой, первый столбец добавляется и обычно называемый "Дорожкой 0" или T 0. Если обнаружение D, i - в логическом элементе валидации дорожки D j, то (j, i +1) запись матрицы валидации равняется 1. В противном случае это - нуль. Для показанного на рисунке кластера матрица валидации Ω
Обратите внимание на то, что все элементы в первом столбце Ω равняются 1, потому что любое обнаружение может быть помехой или ложным предупреждением. Один важный шаг в логике объединенной вероятностной ассоциации данных (JPDA) должен получить все выполнимые независимые объединенные события в кластере. Два предположения для выполнимых объединенных событий:
Обнаружение не может быть испущено больше чем одной дорожкой.
Дорожка не может быть обнаружена несколько раз датчиком во время одного сканирования.
На основе этих двух предположений могут быть сформулированы выполнимые объединенные события (FJEs). Каждый FJE сопоставлен с матрицей FJE Ωp из начальной матрицы валидации Ω. Например, с матрицей валидации Ω, восемь матриц FJE могут быть получены:
Как прямое следствие этих двух предположений, Ωp матрицы имеют точно одно "1" значение на строку. Кроме того, за исключением первого столбца, который сопоставляет с помехой, может быть самое большее один "1" для каждого столбца. Когда количество связанных дорожек растет в кластере, количестве увеличений FJE быстро. jpdaEvents функционируйте использует эффективный алгоритм поиска в глубину, чтобы сгенерировать все выполнимые объединенные матрицы события.
[1] Фортманн, T. Y. Панель шалом и М. Шефф. "Отслеживание гидролокатора Нескольких Целей Используя Объединенную Вероятностную Ассоциацию Данных". Журнал IEEE Океанской Разработки. Издание 8, Номер 3, 1983, стр 173-184.
[2] Musicki, D. и Р. Эванс. "Объединенная Интегрированная Вероятностная Ассоциация Данных: JIPDA". Транзакции IEEE на Космических и Электронных системах. Издание 40, Номер 3, 2004, стр 1093-1099.
objectDetection | objectTrack | trackHistoryLogic | trackingABF | trackingCKF | trackingEKF | trackingIMM | trackingKF | trackingUKF