Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Программное обеспечение Simscape Multibody основано на среде Simscape, которая поддерживает одномерные области поступательного и вращательного движения, вперед или об одной оси для одного тела за один раз. Механические элементы библиотеки Simscape Foundation включают массы, инерцию, и внутренние силы и крутящие моменты, а также датчики и приводы. Блоки библиотеки Interface Elements позволяют вам выборочно связывать машину Simscape Multibody с механической схемой.
Консультируйтесь с документацией Simscape для больше о Физических сетях и одномерных областях.
Поскольку модели Simscape симулируют движение вперед или об одной оси, один блок Interface Element может связать только одно соединение Simscape Multibody, примитивное за один раз к схеме Simscape, взаимодействующей через интерфейс через порт Sensor/Actuator на Блоке соединений. Интерфейсный Элемент не добавляет и не вычитает степени свободы (число степеней свободы) к или от объединенной механической машиной схемы. Его связь похожа на элемент силы между этими двумя областями (см. Добавляющие Внутренние Силы):
С точки зрения машины Simscape Multibody Интерфейсный Элемент ведет себя как привод силы, действующий на выбранный объединенный примитив. Интерфейсный блок вводит силу или крутящий момент от механической схемы между Телами, соединенными с любой стороной Соединения.
С точки зрения схемы механического устройства Simscape Интерфейсный Элемент ведет себя как привод движения. Интерфейсный блок вводит поступательное или вращательное движение от машины в линию связи схемы.
Направленность или смысл движения, установленного основой (B) - последователь (F) порядок в Соединении Simscape Multibody, сохраняются в схеме механического устройства Simscape.
Интерфейсный Элемент сохраняет силу или крутящий момент, текущий через Интерфейсный Элемент в машину и движение, действующее через Соединение, переданное в механическую схему. Интерфейсные Элементы таким образом сохраняют механическую энергию, передавая его без потери между этими двумя областями.
Интерфейсные Элементы могут связать примитивы призматического или шарнирного соединения с поступательным или вращательным движением, через Prismatic-Translational Interface или блоки Revolute-Rotational Interface, соответственно.
Simscape Multibody и симуляции механического устройства Simscape отдельно допустимы. Однако симуляция движущихся контактирующих тел, смоделированных как масса Simscape и элементы инерции, связанные через Интерфейсные Элементы с машиной Simscape Multibody, не завершена и требует, чтобы уход избежал нефизических результатов. Эти ограничения являются результатом своих различных представлений движения и вступающей в конфликт динамики:
Одномерное движение в схемах Simscape по сравнению с 3D движением в машинах Simscape Multibody.
Схема Simscape не моделирует движение таких тел вперед или об осях, ортогональных к двойной примитивной оси, выбранной в Соединении, с которым соединяют интерфейсом.
Абсолютное движение каждой массы Simscape и инерции, представленной линиями связи по сравнению с относительным движением, представленным Соединениями, между телами Simscape Multibody.
Все массы в моделях Simscape живут в неявной инерционной системе координат. Схема механического устройства Simscape, с которой соединяют интерфейсом к машине Simscape Multibody в общих перемещениях в ускоренной системе координат. Симуляция с такой схемой не включает псевдосилы, действующие на массу Simscape и элементы инерции, как испытано в такой неинерционной системе координат, и таким образом нарушает второй закон Ньютона механики.
Как масса и/или инерция, смоделированная в механической схеме, с которой соединяют интерфейсом, увеличен, так нарушение второго закона Ньютона. Масса как таковая и/или инерция уменьшены, нарушение - также.
Модель все массы и инерция в вашей системе как Тела в машине Simscape Multibody и стараются не помещать массу и элементы инерции в любого, соединила интерфейсом со схемами механического устройства Simscape.
Модели с массой и элементами инерции в схемах механического устройства Simscape, с которыми соединяют интерфейсом к машине Simscape Multibody, не физически допустимы. Симуляция с такими моделями не дает к допустимым результатам.
Соединять интерфейсом с Соединением со схемой механического устройства Simscape:
Выберите соответствующий блок Interface Element, призматический или вращательный, от библиотеки Interface Elements.
Если вы хотите связать поступательную механическую схему с призматическим примитивом, выберите Prismatic-Translational Interface.
Если вы хотите связать вращательную механическую схему с вращательным примитивом, выберите Revolute-Rotational Interface.
Вы не можете смешать поступательное и вращательное движение с Интерфейсным Элементом.
Скопируйте выбранный блок Interface Element в свою модель.
Откройте Объединенное диалоговое окно и добавьте дополнительный порт Sensor/Actuator. Закройте диалоговое окно.
Соедините Интерфейсный порт коннектора механического устройства Элемента![]() с новым портом Sensor/Actuator на Соединении.
с новым портом Sensor/Actuator на Соединении.
Откройте Интерфейсное диалоговое окно Элемента. Выпадающее меню Connected to primitive содержит список всех примитивов соответствующего типа (призматический или вращательный) в Соединении, с которым соединяют интерфейсом.
Выберите примитив, с которым вы хотите соединить интерфейсом. Схема Simscape пройдет или о той оси. Нажмите OK или Apply.
На стороне машины Соединение должно следовать стандартным правилам для Соединений и в частности быть соединено с Телом на каждой стороне. (См. Степени свободы Моделирования.) Необходимо соединить Интерфейсный Элемент с остальной частью механической схемы.
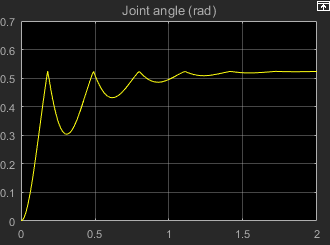
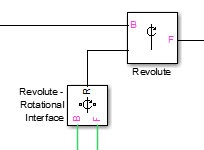
mech_interface_rot_spr_damper пример иллюстрирует соответствующий интерфейс элементов механического устройства Simscape с 3D машиной Simscape Multibody.
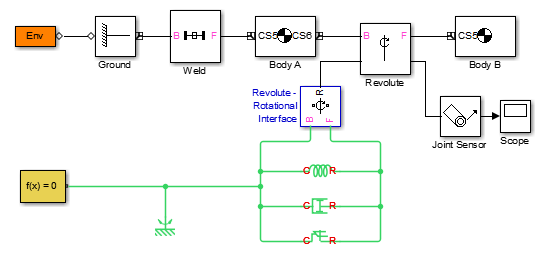
Механическая схема, с которой соединяют интерфейсом, не имеет никакой инерции или массовых элементов, который предотвращает проблемы, обсужденные в Ограничениях на Схему Механического устройства Simscape, с которой Соединяют интерфейсом. Это содержит только элементы силы: вращательная пружина, вращательный демпфер и вращательный жесткий упор. Вместе, эти элементы силы создают жесткий упор для блока Revolute. Этот блок содержит только один примитивный, R1, который можно просмотреть путем открытия его диалогового окна. Через этот примитив элементы силы Simscape действуют между Телом A и Телом B, ограничивая их относительное угловое движение о вращательном R1 ось к ±π/6 радианам.