Следуйте за waypoints для UAV
Robotics System Toolbox библиотека UAV
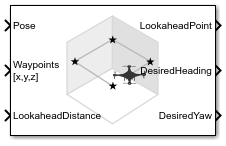
Блок Waypoint Follower следует за набором waypoints для беспилотного воздушного транспортного средства (UAV) с помощью предварительной точки. Блок вычисляет предварительную точку, желаемую направиться, и желал отклонения от курса, учитывая положение UAV, набор waypoints и предварительное расстояние. Задайте набор waypoints и настройте предварительное расстояние и параметры радиуса перехода для навигации по waypoints. Блок поддерживает и мультиротор и фиксированное крыло типы UAV.
При следовании за набором waypoints первый waypoint может быть проигнорирован на основе положения UAV. По причине предварительного расстояния, используемого, чтобы отследить путь, waypoint последователь проверяет, ли UAV около следующего waypoint к переходу к следующему сегменту пути с помощью области перехода. Однако существует также условие где переходы UAV когда за пределами этой области. 3-D гиперплоскость чертится в следующем waypoint. Если положение UAV в этой гиперплоскости, waypoint переходах последователя к следующему waypoint. Это поведение помогает гарантировать, что UAV следует за достижимым путем.
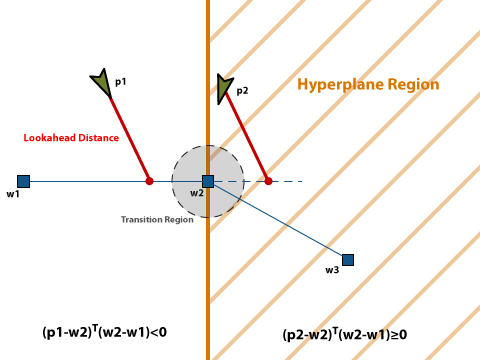
Условию гиперплоскости удовлетворяют если:
(p-w1) T (w2-w1) ≥ 0
p является положением UAV, и w1 и w2 являются последовательными waypoint положениями.
Если вы находите это ограничение поведения, полагаете, что добавление большего количества waypoints на основе вашего начального положения обеспечивает последователя, чтобы перейти к вашей начальной букве waypoint.
[1] Парк, Sanghyuk, Джон Деист и Джонатан, как. "Новая нелинейная логика руководства для отслеживания траектории". Руководство AIAA, навигация, и конференция по управлению и приложение, 2004.
control | derivative | environment | ode45 | plotTransforms | roboticsAddons | state