В Simulink® Library Browser добавьте блок eQEP из Embedded Coder® Support Package для Процессоров Instruments™ C2000™ Техаса> F2837xD.
Блок eQEP читает квадратурные импульсы энкодера и постепенно увеличивает количество положения. Этот блок выводит квадратурный импульс энкодера для механического переноса положения ротора, когда квадратурный импульс индекса энкодера читается.
Смотрите раздел Quadrature Encoder Interface Configuration in Model Configuration Parameters для настроек, связанных с квадратурным энкодером.
В диалоговом окне c28x eQEP параметров блоков сконфигурируйте квадратурный энкодер, чтобы считать квадратурное количество импульса энкодера в процессоре TI и перенести импульсный встречный выход, когда импульс индекса будет найден как показано в этой таблице.
| Вкладка и Параметр в Блоке eQEP | Настройки |
|---|---|
General> Module | eQEP1 |
General> Sample time | -1 |
Position counter> Output position counter | on |
Position counter> Maximum position counter value (0~4294967295) | 2^16-1 |
Position counter> Position counter reset mode | Reset on the first index event |
Position counter> Output latch position counter on index event | on |
Position counter> Index event latch of position counter | Falling edge |
Переименуйте блок как eQEP.
модуль eQEP1 выбран, потому что квадратурный энкодер соединяется с интерфейсом QEP_A в аппаратной плате LaunchPadXL28379d. Выберите шаг расчета как -1 потому что библиотечный блок является вызовом функции, инициированным прерыванием ADC синхронно. Максимальным значением счетчика положения является 2^16-1 потому что счетчик положения использует 16-битную архитектуру в блоке драйверов библиотеки. Режим сброса счетчика положения на импульсе индекса переносится, положение рассчитывают на импульс индекса.
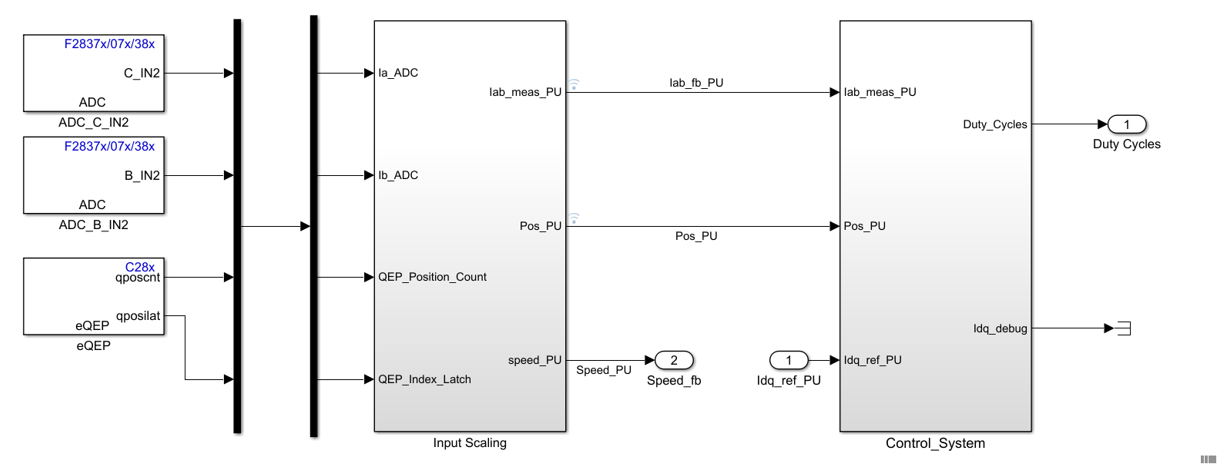
Добавьте eQEP модуль блока драйверов в mcb_pmsm_foc_sim/Current control подсистема как показано в этом рисунке.