Используйте эти шаги, чтобы выбрать целевой компьютер в настройке модели.
В модели Simulink® нажмите Hardware> Hardware Settings, чтобы открыть диалоговое окно Configuration Parameters.
Откройте вкладку Hardware Implementation и установите Hardware board на TI Delfino F28379D LaunchPad.
Для любой другой пользовательской платы перейдите к вкладке Hardware Implementation диалогового окна Configuration Parameters и выберите соответствующий процессор и отредактируйте периферийные детали в Hardware board settings> Target hardware resources.
Для решателя и квадратурных деталей настройки интерфейса энкодера, смотрите Параметры конфигурации Модели.
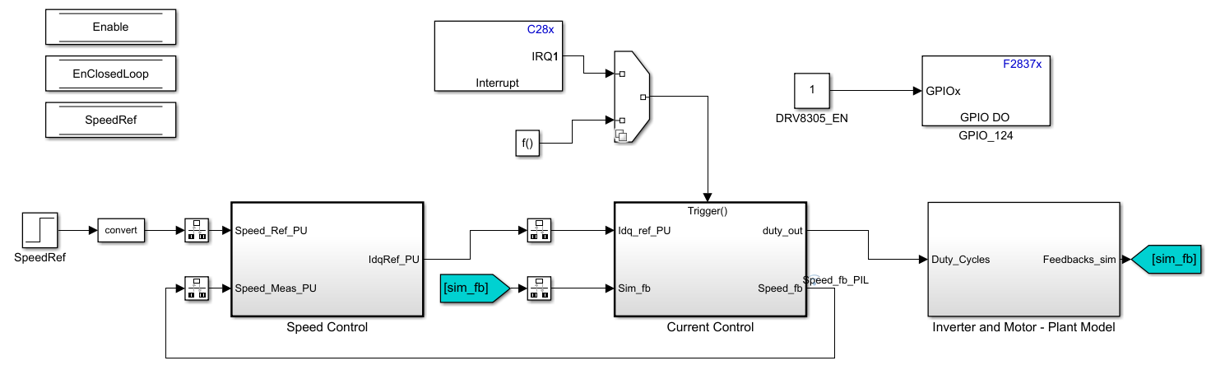
Соедините плату Instruments™ BOOSTXL-DRV8305 Техаса и коннектор QEP к аппаратной Texas Instruments LaunchPad XL плате. Для аппаратных деталей связи, связанных с Texas Instruments C2000 LaunchPadXL, смотрите Аппаратные Связи. BOOSTXL-DRV8305 (присоединенный к плате LaunchPadXL) требует разрешать сигнала. Этот сигнал соединяется с контактом GPIO124 процессора.
В Браузере Библиотеки Simulink добавьте Embedded Coder® Support Package для Процессоров Texas Instruments C2000™> F2837xD> Цифровой выход. В диалоговом окне параметров блоков блока Digital Output измените эти настройки:
| Параметр в блоке цифрового выхода | Настройки |
|---|---|
GPIO Group | GPIO120~GPIO127 |
GPIO124 | on |
Переименуйте блок как GPIO_124.
Добавьте постоянный блок со значением 1 как вход с блоком GPIO124 как показано в этом рисунке.
На вкладке Hardware модели Simulink выберите Build, Deploy & Start. Это генерирует код С, проект CCS и целевой-файл. Система использует последовательную передачу, чтобы загрузить этот целевой определенный-файл на целевой компьютер и запускает загруженный алгоритм в оборудовании.
Когда модель развертывается на цели, моторных запусках в разомкнутом цикле и затем запускается в регулировке скорости с обратной связью. Этот пример рекомендует, чтобы вы использовали последовательную передачу, чтобы контролировать и отладить сигналы. См. модель mcb_pmsm_foc_qep_f28379d в качестве примера для получения дополнительной информации о реализации последовательного получают и передают коммуникации (между хостом и предназначаются для моделей). От блока Serial Receive обновите Блок памяти Хранилища данных, чтобы запустить и остановить двигатель.
