Лоцируйте данные о метке основной истины
groundTruthLidar объект содержит информацию о метках основной истины лидара. Источник данных, используемый, чтобы создать объект, является набором данных об облаке точек лидара. Можно создать, экспортировать или импортировать groundTruthLidar объект из приложения Lidar Labeler.
Экспортировать groundTruthLidar объект из приложения Lidar Labeler, на панели инструментов приложения, выбирает Export Labels> To Workspace. Приложение экспортирует объект в рабочую область MATLAB®. Создать groundTruthLidar возразите программно, используйте groundTruthLidar функция (описанный здесь).
gTruth = groundTruthLidar(dataSource,labelDefs,labelData)
dataSource задает источник данных об облаке точек лидара и устанавливает DataSource свойство.
labelDefs задает определения ROI и меток сцены, содержащих информацию, таких как NameВвод, и Group, и устанавливает LabelDefinitions свойство.
labelData указывает информацию идентификации, положение, и устанавливает метку времени для отмеченных меток видимой области (ROI) и меток сцены, и устанавливает LabelData свойство.
DataSource — Источник основной истины лоцирует данныеPointCloudSequenceSource возразите | VelodyneLidarSource возразите | LasFileSequenceSource возразите | RosbagSource объектИсточник основной истины лоцирует данные в виде PointCloudSequenceSource, VelodyneLidarSource, LasFileSequenceSource, или RosbagSource объект. Этот объект содержит информацию, которая описывает источник, из которого были помечены данные о лидаре основной истины. Эта таблица предоставляет больше подробную информацию о типе объектов, которые можно задать.
| Имя объекта | Источник данных | Ссылка класса |
|---|---|---|
PointCloudSequenceSource | Папка последовательности облака точек | vision.labeler.loading.PointCloudSequenceSource |
VelodyneLidarSource | Пакетное получение Velodyne® (PCAP) файл | vision.labeler.loading.VelodyneLidarSource |
LasFileSequenceSource | LAS или папка последовательности файла LAZ | lidar.labeler.loading.LasFileSequenceSource |
RosbagSource | Файл Rosbag | lidar.labeler.loading.RosbagSource |
LabelDefinitions Определения метокЭто свойство доступно только для чтения.
Пометьте определения в виде таблицы. Чтобы составить эту таблицу, используйте одну из этих опций.
В приложении Lidar Labeler создайте определения метки, и затем экспортируйте их как часть groundTruthLidar объект.
Используйте labelDefinitionCreatorLidar объект сгенерировать таблицу определений метки. Если вы сохранили эту таблицу к MAT-файлу, можно затем загрузить определения метки в сеанс приложения Lidar Labeler путем выбора Open> Label Definitions от панели инструментов приложения.
Составьте таблицу определений метки в командной строке MATLAB.
Эта таблица описывает необходимые и дополнительные столбцы таблицы, заданной в LabelDefinitions свойство.
| Столбец | Описание | Требуемый или дополнительный | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
Name | Строки или векторы символов, задающие имя каждого определения метки. | Необходимый | ||||||||
Type |
| Необходимый | ||||||||
LabelColor | Триплеты RGB, которые задают цвета определений метки. Значения находятся в области значений [0, 1]. Желтый цвет (триплет RGB [1 1 0]) резервируется для цвета выбранных меток в приложении Lidar Labeler. | Дополнительный Когда вы задаете метки в приложении Lidar Labeler, необходимо задать цвет. Поэтому экспортированная таблица определений метки всегда включает этот столбец. Когда вы создаете определения метки с помощью | ||||||||
Group | Строки или векторы символов, задающие группу, которой принадлежит каждое определение метки. | Дополнительный Если вы составляете таблицу определений метки в командной строке MATLAB, вы не должны включать Если вы экспортируете определения метки из приложения Lidar Labeler или создаете их использующий | ||||||||
Description | Строки или векторы символов, которые описывают каждое определение метки. | Дополнительный Если вы составляете таблицу определений метки в командной строке MATLAB, вы не должны включать Если вы экспортируете определения метки из приложения Lidar Labeler или создаете их использующий | ||||||||
Hierarchy | Структуры, содержащие информационные признаки для каждого определения метки.
Если определение метки не содержит атрибуты, то запись таблицы для того определения метки пуста. | Дополнительный Когда вы задаете подметки или атрибуты в приложении Lidar Labeler или |
LabelData — Пометьте данные для каждого ROI и метки сценыЭто свойство доступно только для чтения.
Пометьте данные для каждого ROI и метки сцены в виде a timetable. Каждый столбец LabelData содержит метки для одного определения метки и соответствует Name значение для каждой строки в LabelDefinitions. Формат устройства хранения данных для данных о метке зависит от типа метки.
| Маркируйте Type | Формат устройства хранения данных для меток в каждой метке времени |
|---|---|
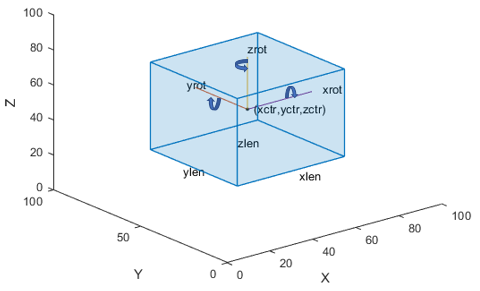
|
Рисунок показывает, как эти значения определяют положение кубоида.
|
labelType.Scene | Логический вектор, где |
Если Cuboid Данные о метке ROI включают атрибуты, затем метки в каждой метке времени должны быть заданы как структуры вместо этого. Структура включает эти поля.
| Маркируйте Structure Field | Описание |
|---|---|
Position | Положения родительского элемента помечают в данной метке времени Формат |
AttributeName1,...,AttributeNameN | Атрибуты родительских меток Каждый заданный атрибут имеет свое собственное поле, где имя поля соответствует названию атрибута. Значение атрибута является вектором символов для |
changeFilePaths | Измените пути к файлам в достоверных данных |
selectLabels | Выберите достоверные данные именем метки или типом |
selectLabelsByGroup | Выберите достоверные данные названием группы метки |
selectLabelsByName | Выберите достоверные данные именем метки |
selectLabelsByType | Выберите достоверные данные типом метки |