Пакет: lidar.labeler.loading
Суперклассы: vision.labeler.loading.MultiSignalSource
Загрузите сигналы из rosbag источников в приложение Lidar Labeler
lidar.labeler.loading.RosbagSource класс создает интерфейс для загрузки сигнала из rosbag файла в приложение Lidar Labeler. В диалоговом окне Select Point Cloud приложения, когда Source Type установлен в Rosbag, этот класс управляет параметрами в том диалоговом окне.
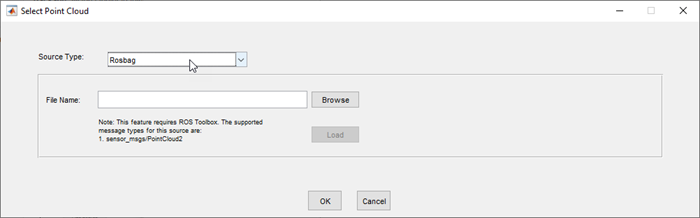
Чтобы получить доступ к этому диалоговому окну, в приложении, выбирают Open> Add Point Cloud.
Этот класс загружает сигналы от sensor_msgs/PointCloud2 Тип сообщения ROS только.
Примечание
Этот класс требует ROS Toolbox.
lidar.labeler.loading.RosbagSource классом является handle класс.
Когда вы экспортируете метки от сеанса приложения Lidar Labeler, который содержит rosbag источник, экспортируемый groundTruthLidar объектно-ориентированная память экземпляр этого класса в его DataSource свойство.
Создать RosbagSource возразите программно, такой, программно создав groundTruthLidar объект, используйте lidar.labeler.loading.RosbagSource функция (описанный здесь).
rosbagSource = lidar.labeler.loading.RosbagSourceRosbagSource объект для загрузки сигнала от rosbag источника данных. Чтобы задать источник данных и параметры, требуемые загружать источник, используйте loadSource метод.
