

Твердый элемент со свойствами, выведенными из внешнего файла
Simscape / Мультитело / Элементы Тела

Блок File Solid моделирует твердый элемент с геометрией, инерцией, цветом и системой координат, выведенной из внешнего файла. Файл должен иметь модель части, в которой должно быть сказано, что он содержит, по крайней мере, данные о геометрии тела. Некоторые форматы могут обеспечить цвет и данные об инерции, хотя такие свойства могут быть заданы вручную в случае необходимости.
Среди поддерживаемых форматов нативные к CATIA (V4, V5 и V6), Creo, Изобретатель, Унигрэфикс НКС, Твердое Ребро, SolidWorks и Паратело (все приложения CAD, распространенные в промышленности и академии). Они включают CATPART, PRT, IPT, SLDPRT и X_T (и его версия двоичных файлов, X_B). Другие допустимые форматы, не сопоставленные с определенным приложением, но распространенные в 3-D моделировании, включают SAT (часто называемый ACIS), JT, STL и ШАГ.
(Рисунок CAD и файлы блока, которые не содержат необходимые данные для твердого элемента, не могут быть импортированы в блок.)
Для расстаются файлы модели с данными о плотности, блок дает опцию, чтобы (автоматически) установить массу, центр массы и тензор инерции тела от вычисления. Это поведение включено по умолчанию (через Type и параметры Based On под узлом Inertia, который, в их исходных состояниях, считает Calculate from Geometry и Density from File).
Если импортированный файл не содержит данные о плотности, необходимо задать его (или, эквивалентно, масса) для вычислений, которые будут сделаны. Установите параметр Based On на Custom Density или Custom Mass ввести недостающие данные.
В качестве альтернативы, если у вас есть полные массовые свойства импортированной части — часто, если для Моделей CAD самим приложением CAD — можно ввести их непосредственно как параметры блоков. Установите инерцию параметр Type на Custom для того, чтобы сделать это.
Обратите внимание на то, что система координат, в которой заданы моменты и продукты инерции, будет варьироваться среди приложений CAD. В этом блоке источник той системы координат принят, чтобы находиться в центре массы (и ее оси, параллельные тем из системы координат). Эта система координат упомянута здесь как система координат разрешения инерции. (Центр массы, с другой стороны, задан в системе координат.) Для получения дополнительной информации, смотрите Задающую Пользовательскую Инерцию.
Если массовые свойства вычисляются из геометрии, можно просмотреть их значения в диалоговом окне блока. Для этого расширьте узел Derived Values под Inertia и нажмите Update. (Эта функция, когда это задано к вычисленным свойствам, требует, чтобы установкой Type инерции был Calculated from Geometry.), Если геометрия или изменения параметров блоков инерции, нажмите кнопку Update еще раз, чтобы отобразить новые массовые свойства. Все значения находятся в единицах СИ длины (m) и масса (kg).
Диалоговое окно блока содержит разборную панель визуализации. Эта панель обеспечивает мгновенную визуальную обратную связь на теле, которое вы моделируете. Используйте его, чтобы найти и устранить любые проблемы с формой и цветом тела. Можно исследовать тело с разных точек зрения путем выбора стандартного представления или путем вращения, панорамируя и масштабируя тело.
Нажмите кнопку Update Visualization![]() , чтобы просмотреть последние изменения в геометрии тела в панели визуализации. Выберите Apply или OK, чтобы передать ваши изменения в теле. Закрытие диалогового окна блока без первого Apply выбора или OK заставляет блок отменять те изменения.
, чтобы просмотреть последние изменения в геометрии тела в панели визуализации. Выберите Apply или OK, чтобы передать ваши изменения в теле. Закрытие диалогового окна блока без первого Apply выбора или OK заставляет блок отменять те изменения.
Твердая панель визуализации
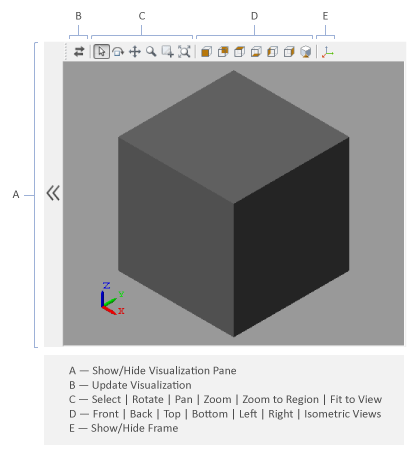
Щелкните правой кнопкой по панели визуализации, чтобы получить доступ к визуализации контекстно-зависимое меню. Это меню предоставляет дополнительные возможности так, чтобы можно было изменить цвет фона, разделить панель визуализации в несколько мозаик и изменить вид представления на установке +Z up (XY Top) по умолчанию.
Как большинство компонентов, тело соединяется через системы координат, из которых оно имеет по крайней мере один. Система координат по умолчанию, которая служит ее ссылкой и сопоставлена с портом R, получает свой источник и оси из данных в импортированном файле. (Источник обычно является нулевой координатой Модели CAD или, если такая технология используется, 3-D скан, содержавшийся в файле.)
Для тех случаев, в которых система координат неуместна для связи, или в котором необходимы несколько систем координат связи, блок идет с инструментом создания системы координат. Обработайте этот инструмент как интерактивную альтернативу блоку Rigid Transform (последний числовые средние значения, чтобы добавить и перевести, а также вращать системы координат, хотя тот, который разделяет системы координат от тела).
Можно создать (и редактирование) системы координат, использующие функции геометрии как ограничения — размещение системы координат на, и ориентация осей системы координат вперед, выбранные вершины, ребра и поверхности. Можно также использовать источник системы координат и его оси, а также центр массы и основных осей инерции, чтобы задать новые системы координат. Каждая система координат добавляет в блок новый порт системы координат (его метка, выведенная из имени, данного в панели создания системы координат).
Чтобы создать или отредактировать систему координат, сначала расширьте узел Frames в диалоговом окне блока. Нажмите![]() кнопку, чтобы создать систему координат или
кнопку, чтобы создать систему координат или![]() кнопку, чтобы отредактировать систему координат (если один, кроме системы координат, уже существует). Определения системы координат зависят от соединения геометрии и данных об инерции, таким образом, вы, должно быть, ранее импортировали файл геометрии части. Если параметры блоков изменяются, необходимо обновить панель визуализации (путем нажатия
кнопку, чтобы отредактировать систему координат (если один, кроме системы координат, уже существует). Определения системы координат зависят от соединения геометрии и данных об инерции, таким образом, вы, должно быть, ранее импортировали файл геометрии части. Если параметры блоков изменяются, необходимо обновить панель визуализации (путем нажатия![]() кнопки) для того, чтобы создать или отредактировать систему координат.
кнопки) для того, чтобы создать или отредактировать систему координат.
Пользовательская система координат полностью задана, когда ее источник и оси также. Из них оси требуют большей части ухода. Необходимо задать две оси, одну первичную и одну вторичную. Первичная ось задает плоскость (настолько нормальный к нему), на котором должны лечь другие оси. Вторичная ось является просто проекцией выбранного направления — оси или функции геометрии — на той плоскости.
Остающееся (и незаданный) ось установлена путем требования, чтобы все три быть перпендикулярными и упорядоченными согласно правилу правой руки. Естественно, вторичная ось должна иметь векторный перпендикуляр компонента к первичной оси. Если эти два параллельны, система координат недопустима. Если система координат затем сохранена, ее ориентация установлена в ту из системы координат.
Использовать функцию геометрии для определений оси или системы координат:
В панели создания системы координат установите переключатель Based on Geometric Feature.
В твердой панели визуализации кликните по вершине, ребру или поверхности. Увеличьте масштаб, при необходимости, чтобы более точно выбрать функцию.
Снова в панели создания системы координат, нажмите кнопку Use Selected Feature.
Распространено в модели параметрировать блоки в терминах переменных MATLAB. Вместо скаляра, вектора или строки, например, параметры блоков будут иметь в его поле имя переменной. Переменная задана в другом месте, часто в маске подсистемы или в рабочем пространстве модели, иногда в отношении внешнего файла M.
Этот подход удовлетворяет сложным моделям, в которых несколько блоков должны совместно использовать то же значение параметров — общая плотность, скажем, или цвет, если задано как вектор RGB. Когда определение переменной MATLAB затем изменяется, также - все параметры блоков, которые зависят от него. Рассмотрите использование переменных MATLAB здесь, если параметр, вероятно, будет совместно использован несколькими блоками в большой модели.
(Для простого примера с твердыми блоками, параметрированными в терминах переменных рабочей области, откройте sm_compound_body модель)
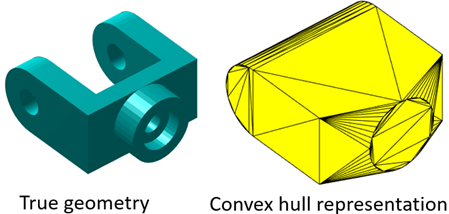
Блок File Solid может сгенерировать представление геометрии выпуклой оболочки импортированного файла CAD в среде Simscape Multibody. Эти геометрические данные могут использоваться, чтобы смоделировать пространственные силы контакта.
Как показано на рисунке, геометрия выпуклой оболочки является приближением истинной геометрии. Обратите внимание на то, что блок вычисляет физические свойства, такие как масса и инерция, на основе ее истинной геометрии.
Простая часть
File Name — Имя файла модели части, чтобы импортироватьИмя и расширение файла модели части, чтобы импортировать. Если файл не находится на пути MATLAB, расположение файла должно быть задано. Расположение файла может быть задано как абсолютный путь, начинающий с корневого каталога файловой системы — например, 'C:/Users/JDoe/Documents/myShape.STEP'. Это может также быть задано как относительный путь, начинающий с папки на пути MATLAB — например, 'Documents/myShape.STEP'.
Unit Type — Источник для модулей геометрии телаFrom File (значение по умолчанию) | CustomИсточник модулей геометрии тела. Выберите From File использовать модули, заданные в импортированном файле. Выберите Custom задавать ваши собственные модули.
Unit — Единицы длины, в которых координаты геометрии заданы в импортированном файлеm (значение по умолчанию) | cm | mm | km | in | ftЕдиницы длины, в которых можно интерпретировать геометрию, заданную в файле геометрии. Изменение модулей изменяет шкалу импортированной геометрии.
Convex Hull — Сгенерируйте представление выпуклой оболочки истинной геометрииoff (значение по умолчанию) | onВыберите Convex Hull, чтобы сгенерировать представление выпуклой оболочки истинной геометрии. Эта выпуклая оболочка может использоваться для контактов путем соединения блока Spatial Contact Force.
Чтобы включить эту опцию, выберите Convex Hull под Export.
Type — Параметризация инерции, чтобы использоватьCalculate from Geometry (значение по умолчанию) | Point Mass | CustomПараметризация инерции, чтобы использовать. Выберите Point Mass смоделировать сконцентрированную массу с незначительной вращательной инерцией. Выберите Custom смоделировать распределенную массу с заданными моментами и продуктами инерции. Настройка по умолчанию, Calculate from Geometry, позволяет блоку автоматически вычислить вращательные свойства инерции от геометрии тела и или плотность или масса.
Based on — Параметр, чтобы основывать вычисление инерции наDensity from File (значение по умолчанию) | Custom Density | Custom MassПараметр, чтобы использовать в вычислении инерции. Блок вычисляет тензор инерции от геометрии тела и выбранного параметра.
Используйте настройку по умолчанию Density from File основывать вычисления на плотности, полученной из импортированного файла. (Обратите внимание на то, что только некоторые форматы могут нести данные о плотности. Из тех, которые делают, только некоторые будут на самом деле нести его. Часто эти данные заданы в приложении CAD прежде, чем сохранить или экспортировать файл модели части.)
Используйте Custom Density задавать плотность кроме полученного из импортированного файла. Используйте Custom Mass вместо этого задавать общую массу тела.
Density — Масса на единичный объем материала1000 kg/m^3 (значение по умолчанию)Масса на единичный объем материала. Массовая плотность может взять положительную или отрицательную величину. Задайте отрицательную массовую плотность, чтобы смоделировать эффекты пустоты или полости в твердом теле.
Derived Values — Отображение расчетных значений массовых свойствОтображение расчетных значений твердых массовых свойств — масса, центр массы, моменты инерции и продукты инерции. Нажмите кнопку Update, чтобы вычислить и отобразить массовые свойства тела. Нажмите эту кнопку после любых изменений в параметрах блоков, чтобы гарантировать, что отображенные значения являются все еще текущими.
Центр массы разрешен в системе координат локальной ссылки тела. Моменты и продукты инерции каждый разрешены в системе координат инерции разрешения — система координат, оси которой параллельны тем из системы координат, но чей источник совпадает с солидным центром массы.
Опция, чтобы вычислить и отобразить массовые свойства активна, когда Inertia> параметры блоков Type установлен в Calculate from Geometry.
Type — Графический, чтобы использовать в визуализации телаFrom Geometry (значение по умолчанию) | Marker | NoneВыбор графических использовать в визуализации тела. Диаграмма является по умолчанию геометрией, заданной для тела. Выберите Marker показать вместо этого простой графический маркер, такой как сфера или куб. Измените этот параметр в None устранить это тело в целом из визуализации модели.
Marker: Shape — Форма маркера, чтобы присвоить телуSphere (значение по умолчанию) | Cube | FrameФорма маркера, посредством которого можно визуализировать тело. Движение маркера отражает движение самого тела.
Marker: Size — Ширина маркера в пикселяхШирина маркера в пикселях. Эта ширина не масштабируется с уровнем изменения масштаба. Обратите внимание на то, что очевидный размер маркера зависит частично от разрешения экрана с более высокими разрешениями, упаковывающими больше пикселей на единицу длины, и поэтому производящими меньшие значки.
Visual Properties — Параметризация для цвета и непрозрачностиSimple (значение по умолчанию) | Advanced | From FileПараметризация для определения визуальных свойств. Выберите Simple задавать цвет и непрозрачность. Выберите Advanced добавить зеркальные подсветки, окружающие тени и эффекты самоосвещения. Выберите From File если импортированный файл имеет цветные данные, и вы хотите использовать его в модели.
(Только некоторые форматы файлов позволяют цветные данные. В тех, которые делают, те данные являются часто дополнительными. Если ваш файл не задаст цвет, тело возьмет серый оттенок (сплошной цвет по умолчанию). Выберите другую параметризацию, чтобы настроить, раскрашивают такие случаи.)
Show Port R — Покажите порт системы координат для связи с другими блокамиВыберите, чтобы осушить порт R.
New Frame — Создайте пользовательскую систему координат для связи с другими блокамиНажмите кнопку Create![]() , чтобы открыть панель для создания новой присоединенной к телу системы координат. В этой панели можно задать имя, источник и ориентацию для системы координат.
, чтобы открыть панель для создания новой присоединенной к телу системы координат. В этой панели можно задать имя, источник и ориентацию для системы координат.
Чтобы назвать пользовательскую систему координат, кликните по текстовому полю параметра Frame Name. Имя идентифицирует соответствующий порт на твердом блоке и в области просмотра в виде дерева Mechanics Explorer.
Чтобы выбрать Frame Origin пользовательской системы координат, используйте один из следующих методов:
At Reference Frame Origin: Сделайте новую систему координат совпадающей с источником системы координат тела.
At Center of Mass: Сделайте новую систему координат совпадающей с центром массы тела.
Based on Geometric Feature: Сделайте новую систему координат совпадающей с центром выбранной функции. Допустимые функции включают поверхности, линии и точки. Выберите функцию из панели визуализации, затем нажмите Use Selected Feature, чтобы подтвердить местоположение источника. Имя местоположения источника появляется в поле ниже этой опции.
Чтобы задать ориентацию пользовательской системы координат, под разделом Frame Axes, выбирают Primary Axis и Secondary Axis пользовательской системы координат и затем задают их направления.
Используйте следующие методы, чтобы выбрать вектор для определения направлений первичных и вторичных осей. Первичная ось параллельна выбранному вектору и ограничивает остающиеся две оси к своей нормальной плоскости. Вторичная ось параллельна проекции выбранного вектора на нормальную плоскость.
Along Reference Frame Axis: Выбирает ось системы координат тела.
Along Principal Inertia Axis: Выбирает ось основной оси инерции тела.
Based on Geometric Feature: Выбирает вектор, сопоставленный с выбранным признаком геометрии тела. Допустимые функции включают поверхности и линии. Соответствующий вектор обозначается белой стрелой в панели визуализации. Можно выбрать функцию из панели визуализации и затем нажать Use Selected Feature, чтобы подтвердить выбор. Имя выбранной функции появляется в поле ниже этой опции.
FrameN — Отредактируйте или удалите существующую пользовательскую систему координатСистемы координат, которые вы создали. N уникальный номер идентификации для каждой пользовательской системы координат.
Кликните по текстовому полю, чтобы отредактировать имя существующей пользовательской системы координат.
Нажмите кнопку Edit![]() , чтобы отредактировать другие аспекты пользовательской системы координат, такие как источник и оси.
, чтобы отредактировать другие аспекты пользовательской системы координат, такие как источник и оси.
Нажмите кнопку Delete![]() , чтобы удалить пользовательскую систему координат.
, чтобы удалить пользовательскую систему координат.
Чтобы включить этот параметр, создайте систему координат путем нажатия на New Frame.
Brick Solid | Cylindrical Solid | Ellipsoidal Solid | Extruded Solid | Revolved Solid | Rigid Transform | Spherical Solid | Variable Brick Solid | Variable Cylindrical Solid | Variable Spherical Solid