Импортируйте CAD, URDF или модель Robotics System Toolbox
[ создает модель Simscape Multibody из CAD, URDF или модели Robotics System Toolbox.H,dataFileName]
= smimport(modelSource)
modelSource имя файла или объекта, содержащего модель или, для импорта CAD, промежуточного представления его. Модели CAD должны быть в XML-файлах, моделях URDF в файлах URDF и моделях Robotics System Toolbox в RigidBodyTree объекты. XML-файлы должны соответствовать XML-схеме Simscape Multibody, и файлы URDF должны соответствовать спецификации URDF. Лицензия Robotics System Toolbox требуется, чтобы создавать RigidBodyTree объекты.
H указатель модели и dataFileName имя вспомогательного файла, который, в импортированных Моделях CAD, хранит числовые значения параметров блоков — в массиве структур, заполненном с переменными MATLAB, на которые ссылаются в блоках. Файл данных обеспечивает механизм, чтобы обновить импортированную модель, если Модель CAD изменяется. Модели импортируются из файлов URDF или RigidBodyTree объекты не используют файлы данных для параметров блоков.
XML-файлы могут прибыть из других источников. smexportonshape функция преобразует Модели CAD Onshape в XML-файлы для импорта. Плагин Simscape Multibody Link делает то же самое для Autodesk Inventor®, PTC® и Моделей CAD SolidWorks®. Плагин распространяется свободно. Для других приложений CAD, и для инструментов моделирования сборок других типов, XML-схема Simscape Multibody позволяет создать пользовательское приложение экспорта модели.
CAD, URDF и RigidBodyTree модели вся доля те же компоненты. Это (i) твердые тела, также известные как части в Моделях CAD и ссылки в моделях URDF и (ii) кинематические ограничения, упакованные, в некоторых случаях, как соединения. Твердые тела импортируют как Подсистемы Simulink с телом и блоками Rigid Transform — элементные компоненты, из которых атрибуты формы, инерции, цвета и размещения выводят. Ограничения сопоставляют в соединение, механизм и другие ограничительные блоки.
Модели URDF содержат <link> элементы, которые в свою очередь содержат <joint> элементы. Аналогично, RigidBodyTree объекты содержат RigidBody объекты, которые в свою очередь содержат Joint объекты. Эта иерархия изменяется с импортом в Simscape Multibody. Соединения и тела становятся одноуровневыми, соединения являются не подсистемами твёрдого тела, но функционируют вместе с ними. Пределы соединений и исходные положения сохраняются как состояния положения в соответствующих объединенных блоках.
Примечание
Объединенные пределы импортируются из URDF и RigidBodyTree модели, но не от Моделей CAD. Воспроизведите объединенные пределы Моделей CAD вручную, если вы должны — путем включения объединенных пределов в блоках соединений и установки предельных положений на соответствующие значения.
[ создает модель Simscape Multibody из CAD, URDF или модели Robotics System Toolbox с пользовательским именем или регенерирует файл данных ранее импортированной Модели CAD. Большинство аргументов пары "имя-значение" применяется только к Моделям CAD. Используйте H,dataFileName]
= smimport(modelSource,Name,Value)ImportMode регенерировать файлы данных параметра и PriorDataFile отлавливать непреднамеренные изменения в модели, такие как удаление части или изменения на его имя.
Импортируйте Модель CAD роботизированной руки. Модель была экспортирована в формате XML с помощью Simscape Multibody Link. XML-файл называют sm_robot.xml и это - часть вашей установки Simscape Multibody.
Импортируйте модель и сохраните ее в памяти как Untitled. Можно позже поменять имя. Когда модель находится в формате XML, можно не использовать расширение на его имя.
smimport('sm_robot');Обновите схему, чтобы собрать модель и визуализировать его в Mechanics Explorer. Во вкладке Modeling нажмите Update Model.
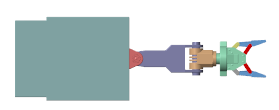
Модели CAD часто принимают ось Y как вертикальную ось, в то время как модели Simscape Multibody принимают ось z. В результате импортированная модель кажется поперечной на экране. Используйте View convention выпадающий список в Mechanics Explorer, чтобы откорректировать для различия в соглашении.
В полосе инструмента Mechanics Explorer, установленной параметр View Convention на Y up (XY Front) и выбор стандартная точка зрения, такая как Isometric, показанный ниже.
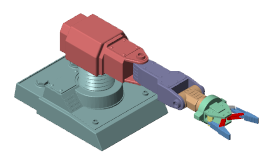
Выбор стандартного представления активирует новый вид представления. Модель вращается, чтобы принять ее ориентацию в исходной Модели CAD.
Симулируйте модель. Манипулятор испытывает недостаток в системе управления и качается беспорядочно при получении по запросу силы тяжести. Основывайтесь на модели путем добавления систем управления, чтобы симулировать полезные задачи. Добавьте внутреннюю механику в соединения, чтобы ослабить их движения и задать объединенные цели, чтобы изменить начальное положение руки.
Импортируйте Модель CAD роботизированной руки и сохраните его в активной папке с именем robotto. Назовите файл данных параметра robottos_data_file.
smimport('sm_robot','ModelName','robotto',... 'DataFileName','robottos_data_file');
Регенерируйте файл данных для импортированной Модели CAD роботизированной руки. Чтобы постараться не перезаписывать исходный файл данных, назовите новый файл robottos_new_data_file.
smimport('sm_robot','ImportMode','dataFile','DataFileName',... 'robottos_new_data_file','PriorDataFile','robottos_data_file');
Укажите импортированную модель на новый файл данных и повторно инициализируйте рабочее пространство модели.
hws = get_param(bdroot,'modelworkspace'); hws.DataSource = 'MATLAB File'; hws.FileName = 'robottos_new_data_file'; hws.reload
Чтобы сделать то же использование Model Explorer, во-первых, выбирают MODELING> DESIGN> Model Workspace, чтобы открыть Model Explorer. Затем в Иерархии модели Model Explorer, щелкните левой кнопкой по Model Workspace. В панели Model Workspace введите robottos_new_data_file.m в параметре File Name и нажимают кнопку Reinitialize from Source, чтобы применить изменение.
Импортируйте модель URDF гуманоидного робота. Модель называют sm_humanoid.urdf и это - часть вашей установки Simscape Multibody.
Импортируйте модель и сохраните ее в памяти как Untitled. Можно позже поменять имя. Когда модель находится в формате URDF, расширение файла требуется.
smimport('sm_humanoid.urdf');Обновите схему, чтобы визуализировать модель в ее начальной настройке с помощью Mechanics Explorer. Во вкладке Modeling нажмите Update Model.
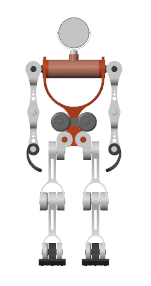
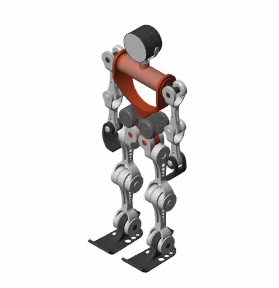
Симулируйте модель. Как с манипулятором, гуманоидный робот испытывает недостаток в системе управления и качается беспорядочно при получении по запросу силы тяжести. Линия плеча служит корневым телом в модели URDF, и таким образом, это фиксируется к мировой системе координат после импорта.
Попытайтесь изменить модель — например, путем удаления твердой связи между линией плеча и мировой системой координат и путем добавления подсистем управления в различных соединениях. Смотрите, что Гуманоидный Робот показал пример для версии модели с основными средствами управления движением. Можно открыть пример путем ввода sm_import_humanoid_urdf в командной строке MATLAB.
RigidBodyTree ОбъектИмпортируйте RigidBodyTree объект для LBR iiwa последовательный манипулятор (произведенный Робототехникой KUKA). Особенности модели в установке Robotics System Toolbox как модель URDF под названием iiwa14.urdf.
Преобразуйте модель URDF в RibidBodyTree объект.
iiwaRBT = importrobot('iiwa14.urdf');Примечание
Лицензия Robotics System Toolbox требуется запуститься importrobot (Robotics System Toolbox).
Импортируйте iiwaRBT объект в Simscape Multibody.
iiwaSM = smimport(iiwaRBT);
Обновите схему, чтобы визуализировать модель в ее начальной настройке с помощью Mechanics Explorer. Во вкладке Modeling нажмите Update Model.
Добавьте гравитационное ускорение вдоль отрицательной оси z модели путем выбора Uniform Gravity> Gravity и ввода [0 0 -9.80665].
Симулируйте модель. Как с манипулятором, iiwa14 модель испытывает недостаток в системе управления и качается беспорядочно при получении по запросу силы тяжести. Основывайтесь на модели путем добавления систем управления, чтобы симулировать полезные задачи. Добавьте внутреннюю механику в соединения, чтобы ослабить их движения и задать объединенные цели, чтобы изменить начальное положение руки.
smexportonshape | importrobot (Robotics System Toolbox)
