Реализуйте модели контроллеров скорости для дисков двигателя постоянного тока
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Основные Блоки Диска
Блок Speed Controller (DC) представляет модель регулятора скорости PI для машин DC. Модель показана на рисунке.
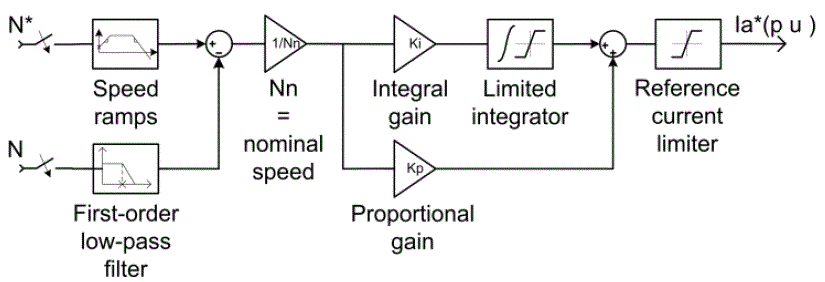
Контроллеры выход ссылка тока якоря, в pu. Эта текущая ссылка обычно используется токовым контроллером, чтобы получить электромагнитный крутящий момент, должен был достигнуть желаемой скорости.
Контроллер берет ссылку скорости и скорость ротора машины DC как входные параметры. Уровень изменения ссылки скорости следует за ускорением и пандусами замедления, которые вы задаете во избежание внезапных ссылочных изменений, которые могли вызвать сверхток арматуры и дестабилизировать систему. Чтобы избежать отрицательных скоростей, ссылка скорости имеет нижний предел 0 об/мин.
Измерение скорости отфильтровано фильтром lowpass первого порядка. Текущий ссылочный выход ограничивается между симметричными нижними и верхними пределами, которые вы задаете.
Задайте тип дисков, чтобы использовать:
Chopper based (значение по умолчанию)
Rectifier based
Задайте количество квадрантов, чтобы использовать. Значением по умолчанию является 1.
Номинальная скорость машины DC, в об/мин, обычно эквивалентном номинальной рабочей скорости. Значением по умолчанию является 1750.
Максимальная скорость изменения ссылки скорости, чтобы обеспечить токи машины в номинальных значениях. Значением по умолчанию является [-1000,1000].
Начальная ссылка скорости машины DC, в об/мин. Значение по умолчанию 0.
Пропорциональная составляющая ПИ-контроллера. Значением по умолчанию является 10.
Интегральная составляющая ПИ-контроллера. Значением по умолчанию является 50.
Максимальная величина выхода текущая ссылка, в относительных единицах. Значением по умолчанию является 1.5.
Первый порядок измерения скорости фильтрует частоту среза в герц. Значением по умолчанию является 40.
Контроллер скорости время выборки, в секундах. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 100e-6.
Временной шаг используется для симуляции в секундах. Значением по умолчанию является 1e-6.
NСкорость машины, в об/мин.
N*Ссылка скорости машины, в об/мин.
d_NСкоростная погрешность (различие между ссылкой скорости сползают и фактическая скорость).
la*(pu)Ссылка тока якоря, в относительных единицах.
Блок Speed Controller (DC) используется в DC1, DC2, DC3, DC4, DC5, DC6 и блоках DC7 библиотеки Electric Drives.
[1] Bose, B. K. Современная силовая электроника и диски AC, NJ: Prentice Hall, 2002.
Bridge Firing Unit (AC) | Bridge Firing Unit (DC) | Current Controller (Brushless DC) | Current Controller (DC) | Direct Torque Controller | Field-Oriented Controller | Regulation Switch | Six-Step Generator | Space Vector Modulator | Speed Controller (AC) | Speed Controller (Scalar Control) | Vector Controller (PMSM) | Vector Controller (WFSM) | Voltage Controller (DC Bus)
