FEM-Parameterized PMSM
Синхронный двигатель с постоянными магнитами, заданный в терминах потокосцепления
Описание
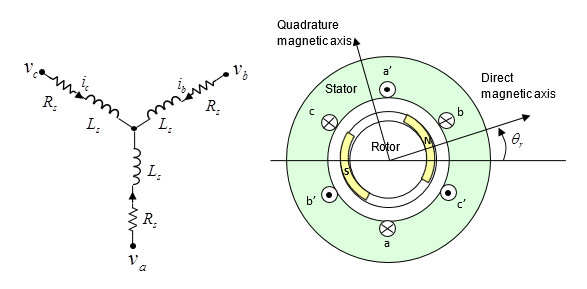
Блок FEM-Parameterized PMSM реализует модель постоянного магнита синхронного двигателя (PMSM), заданного в терминах магнитного потокосцепления. Вы параметрируете блок путем введения таблицы данных моторного магнитного потока как функция угла ротора и текущих. Это - способ, которым сторонние магнитные пакеты метода конечных элементов (FEM) обычно экспортируют информацию о потоке. Из-за табличной формы поток может варьироваться нелинейным способом и на углу ротора и на текущий. Можно поэтому использовать этот блок для модели PMSM с трапециевидным профилем коэффициента противо-ЭДС, иногда названным бесщеточным двигателем постоянного тока, а также регулярным PMSM.
Рисунок показывает эквивалентную схему для соединенного звездой PMSM. Угол ротора является нулем, когда поток постоянного магнита выравнивает с A-фазой магнитную ось.
На практике поток, соединяющий каждую из этих трех обмоток, зависит от всех трех токов и угла ротора. При сведении в таблицу потока, когда функция четырех независимых переменных может привести к неэффективности симуляции и значительным требованиям к памяти, чтобы управлять данными. Блок, поэтому, позволяет вам выбрать между следующими методами параметризации для потока и крутящего момента:
— 2D поиск по таблице, с опциями, чтобы свести в таблицу в терминах текущего и угла ротора, или в терминах d- ось и q- токи оси. Право преимущественной покупки принимает постоянную взаимную индуктивность и поддерживает несинусоидальные профили коэффициента противо-ЭДС. Вторая опция принимает синусоидальный коэффициент противо-ЭДС и получает эффекты насыщения для внутренней части PMSMs (IPMSMs).
— 3-D поиск по таблице, на основе постоянного тока, текущая квадратура, и угол ротора. Вы обеспечиваете данные о поиске потока для фазы a. Парк использования блока преобразовывает, чтобы сопоставить три статора извилистые токи с квадратурные токи и прямому. Этот метод уменьшает сложность данных, по сравнению с 4-D поиском по таблице, и поэтому приводит к улучшаемой производительности симуляции.
— Поиск по таблице 4-D, на основе трех статоров извилистые токи и угол ротора. Вы обеспечиваете данные о поиске потока для фазы a. Эта модель имеет лучшую точность этих трех, но также и является самой дорогостоящей в терминах эффективности симуляции и требований к памяти.
— 3-D поиск по таблице, на основе данных о потокосцеплении. Можно обеспечить данные о потокосцеплении во множестве форматов. Парк использования блока преобразовывает, чтобы сопоставить три статора извилистые токи с квадратурные токи и прямому. Этот метод уменьшает сложность данных, по сравнению с 4-D поиском по таблице, и поэтому приводит к улучшаемой производительности симуляции.
По умолчанию все варианты блока реализуют настройку раны Уая для обмоток статора. Однако возможно переключиться на настройку раны дельты, выбираемое использование параметра Winding type. Когда в настройке раны дельты, фаза a соединяется между портами a и b, фазой b между портами b и c и фазой c между портами c и a.
Чтобы получить доступ к этим методам параметризации, щелкните правой кнопкой по блоку по своей модели, выберите > , и затем выберите желаемый вариант блока, с или без тепловых портов. По умолчанию тепловые порты не осушены. Для получения дополнительной информации смотрите Тепловые Порты.
Модель 2D данных с постоянной взаимной индуктивностью
В этой 2D модели данных потока поток, соединяющий каждую обмотку, принят, чтобы зависеть нелинейно только от тока в той же самой обмотке плюс угол ротора. На практике это - разумное предположение для многих постоянный магнит синхронные двигатели; однако, это менее точно для коммутируемых двигателей нежелания. Учитывая это предположение, потоки в этих трех обмотках:
где потокосцепление для A-фазы, вьющейся как функция угла ротора и текущей A-фазы. Θ r = 0 соответствует ротору d- ось, выравнивающаяся с A-фазой положительное направление магнитного потока. M s является статором статора взаимная индуктивность.
Для улучшаемой числовой производительности уравнения, реализованные в блоке на самом деле, работают с частными производными потокосцепления относительно тока, , и угол ротора, , вместо потока непосредственно. Если ваш пакет FEM не экспортирует эти частные производные, можно определить их использующий скрипт MATLAB®. Смотрите Соленоид, Параметрированный с моделью Данных в качестве примера FEM и ее поддержкой скрипт MATLAB для примера того, как сделать это.
Электрические уравнения для блока, заданного в терминах частных производных потока:
где
v a, v b, v c является напряжениями, применился к A, B, и обмоткам статора C.
i a, i b, i c является токами статора в каждой из этих трех обмоток.
R s является сопротивлением каждой из обмоток статора.
M s является статором статора взаимная индуктивность.
частные производные потокосцепления относительно статора, текущего в каждой из этих трех обмоток.
частная производная потокосцепления относительно угла ротора.
Блок может автоматически вычислить матрицу крутящего момента от информации о потоке, которую вы предоставляете. В качестве альтернативы можно установить параметр Calculate torque matrix? на No и непосредственно задайте крутящий момент как функцию угла ротора и текущих. Смотрите страницу с описанием блока FEM-Parameterized Rotary Actuator для получения дополнительной информации.
Модель 2D данных с синусоидальным коэффициентом противо-ЭДС
В этой 2D модели данных потока поток, соединяющий каждую обмотку, принят, чтобы зависеть нелинейно от всего статора, извилистые токи, плюс он принят, что потокосцепление постоянного магнита синусоидальное. Внутренний магнит PMSMs (или IPMSMs) обычно соответствует этому предположению хорошо. Уравнения:
где
i d и i q является d- ось и q- токи оси, соответственно.
ϕ d и ϕ q является d- ось и q- потокосцепления оси, соответственно.
ϕ m является потокосцеплением постоянного магнита.
L d и L q является d- ось и q- составляющие индукции, соответственно. Они приняты, чтобы зависеть от d- ось и q- токи оси.
N является количеством пар полюса.
T является электрическим крутящим моментом.
3-D модель данных частной производной Используя парк Transform
Работа с четырехмерными данными имеет и стоимость эффективности симуляции и стоимость памяти. Чтобы уменьшать табличную размерность до 3D, 3-D Парк использования модели данных преобразовывает, чтобы сопоставить эти три тока с квадратурные токи и прямому:
В общем случае Парк преобразовывает карты к прямому, квадратуре и токам нулевой последовательности. Однако текущая нулевая последовательность обычно мала под нормальными условиями работы. Поэтому модель пропускает зависимость условий потокосцепления на текущей нулевой последовательности, и определяет потокосцепление в терминах только прямого и квадратурные токи плюс угол ротора. Уравнение потока для 3-D модели данных:
Электрические уравнения для блока также определены в терминах частных производных потока, похожих на 4-D модель данных. Можно вычислить 3-D данные о частной производной потокосцепления из 4-D использования данных о потокосцеплении ee_calculateFluxPartialDerivatives.
Модель данных частной производной 4-D
Поток, соединяющий каждую из обмоток, является функцией тока в той обмотке, токов в других двух обмотках и угла ротора. Для полной точности модель данных потока 4-D принимает, что потокосцепление является функцией этих трех токов и угла ротора, поэтому выполняя четырехмерный поиск по таблице. Уравнение потока:
где
ϕ a, ϕ b, ϕ c является потокосцеплениями для A, B, и обмотками статора C.
i a, i b, i c является токами статора в каждой из этих трех обмоток.
Θ r является углом ротора. Θ r = 0 соответствует случаю, где поток постоянного магнита выравнивается с потоком обмотки статора A-фазы.
N является количеством пар полюса.
Данные о потокосцеплении приняты циклические с Θ r. Если, например, двигатель имеет шесть пар полюса, то областью значений для данных является 0 ≤ Θ r ≤ 60 °. Необходимо обеспечить данные и в 0 и 60 градусах, и потому что данные являются циклическими, частные производные потокосцепления должны быть тем же самым в этих двух конечных точках.
Уравнение крутящего момента:
4-D модель данных не имеет опции для блока, чтобы определить крутящий момент из потокосцепления. Из-за увеличенных числовых издержек в 4-D случае лучше предварительно вычислить крутящий момент только однажды, вместо того, чтобы вычислить его каждый раз, когда вы запускаете симуляцию.
Для улучшаемой числовой производительности уравнения, реализованные в блоке на самом деле, работают с частными производными потокосцепления относительно этих трех токов и угла ротора, а не потока непосредственно. Если ваш пакет FEM не экспортирует эти частные производные, можно определить их использование ee_calculateFluxPartialDerivatives.
Электрические уравнения для блока, заданного в терминах частных производных потока:
где
v a, v b, v c является напряжениями, применился к A, B, и обмоткам статора C.
i a, i b, i c является токами статора в каждой из этих трех обмоток.
R s является сопротивлением каждой из обмоток статора.
3-D модели данных потокосцепления
3-D опции данных о потокосцеплении позволяют вам работать с необработанными данными о потокосцеплении, экспортированными из вашего моторного Design Tool конечного элемента (FE). Это в отличие от 3-D опций данных о частной производной, для которых необходимо определить частные производные. Можно обеспечить данные о потокосцеплении во множестве форматов, чтобы поддержать различные соглашения инструмента FE:
Плоские данные о потокосцеплении DQ-осей или данные о потокосцеплении A-фазы — поддержка инструментов Some, работающая с потокосцеплением, разрешенным в прямой (D) и квадратура (Q) оси. Преимущество этого подхода состоит в том, что данные для углов ротора в области значений 0 до 360/N/3 степеней требуются (где N является количеством пар полюса). Другие инструменты работают непосредственно с A-, B-и потокосцеплениями C-фазы, и для этого можно импортировать только потокосцепление A-фазы, для которого угловая область значений ротора должна быть в области значений 0 до 360/N степеней. Неявное предположение об импорте только данные A-фазы - то, что данные о фазе B и C являются тем же самым кроме переключенной на нижний регистр фазы.
Плоские использующие декартовы или полярные текущие координаты — Декартово табулирование подразумевает, что потокосцепление сведено в таблицу в терминах текущей D-оси и текущей Q-оси (плюс угол ротора). В качестве альтернативы полярное табулирование включает потокосцепления сведения в таблицу в терминах текущей величины, текущего угла усовершенствования относительно Q-оси и угла ротора. Преимущество полярных координат состоит в том, что это более естественно отражает разрешенные операционные токи, таким образом, избегая неиспользованных табличных точек данных.
Эти соглашения приводят к четырем опциям параметризации Flux linkage data format:
D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta)
D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta)
A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta)
A-phase flux linkage as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta)
Помимо выбора формата данных потокосцепления, используемого вашим инструментом FE, необходимо выбрать версию Парка, преобразовывают используемый инструментом. Эти четыре соглашения описаны ниже и соответствуют этим четырем опциям для Park’s convention for tabulated data выпадающее меню.
Примечание
При рассмотрении регистрируемых значений для токов D-и Q-оси имейте в виду, что для каждой из этих опций, формат преобразован, по мере необходимости, так, чтобы внутренне блок FEM-Parameterized PMSM последовательно использовал Опцию 1.
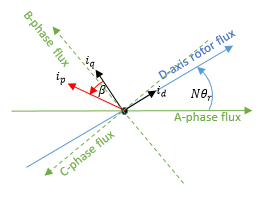
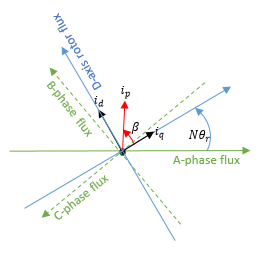
Опция 1. Q приводит D, угол ротора, измеренный от A-фазы до D-осиЭто - соглашение Парка, используемое внутренне блоками моторного и машины Simscape™ Electrical™. Все другие опции преобразованы в этот формат.
N: количество пар полюсов
θ r: угол ротора
i d, i q: D-ось и токи Q-оси
i p: Текущая величина =
β: Текущий угол усовершенствования =
Соответствующий Парк преобразовывает,
где i a, i b и i c является A-фаза, B-фаза и токи C-фазы, соответственно.
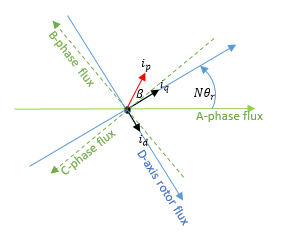
Опция 2. Q приводит D, угол ротора, измеренный от A-фазы до Q-осиN: количество пар полюсов
θ r: угол ротора
i d, i q: D-ось и токи Q-оси
i p: Текущая величина =
β: Текущий угол усовершенствования =
Соответствующий Парк преобразовывает,
где i a, i b и i c является A-фаза, B-фаза и токи C-фазы, соответственно.
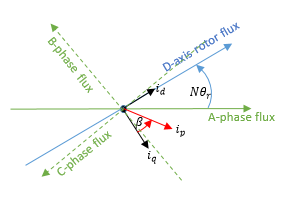
Опция 3. D приводит Q, угол ротора, измеренный от A-фазы до D-осиN: количество пар полюсов
θ r: угол ротора
i d, i q: D-ось и токи Q-оси
i p: Текущая величина =
β: Текущий угол усовершенствования =
Соответствующий Парк преобразовывает,
где i a, i b и i c является A-фаза, B-фаза и токи C-фазы, соответственно.
Опция 4. D приводит Q, угол ротора, измеренный от A-фазы до Q-осиN: количество пар полюсов
θ r: угол ротора
i d, i q: D-ось и токи Q-оси
i p: Текущая величина =
β: Текущий угол усовершенствования =
Соответствующий Парк преобразовывает,
где i a, i b и i c является A-фаза, B-фаза и токи C-фазы, соответственно.
Вычисление потерь в железе
Независимо от методов параметризации для потока и крутящего момента, все варианты блока используют ту же модель потерь в железе, которая основана на работе Меллора [1]. Потери в железе разделены на два условия, одно представление основного пути к намагничиванию и другое представление перекрестного зубного пути к совету, который становится активным во время ослабленной операции поля.
Термин, представляющий основной путь к намагничиванию, зависит от вызванного напряжения статора RMS, :
Это - доминирующий термин в течение операции без загрузок. k является коэффициентом противо-ЭДС, постоянной, связывающим вольты RMS на Гц. Это задано как , где f является электрической частотой. Первый срок на правой стороне является магнитной гистерезисной потерей, второй является потеря токов Фуко, и третьей является избыточная потеря. Эти три коэффициента, появляющиеся на числителях, выведены из значений, что вы предусматриваете гистерезис разомкнутой цепи, вихрь и избыточные потери.
Термин, представляющий перекрестный зубной путь к совету, становится важным, когда поле размагничивания создано и может быть определено из теста короткой схемы анализа конечных элементов. Это зависит от эдс RMS, сопоставленной с перекрестным зубным потоком совета, :
Три условия числителя выведены из значений, вы предусматриваете гистерезис короткой схемы, вихрь и избыточные потери.
Тепловые порты
Блок имеет четыре дополнительных тепловых порта, один для каждой из этих трех обмоток и один для ротора. Эти порты скрыты по умолчанию. Чтобы осушить тепловые порты, щелкните правой кнопкой по блоку по своей модели, выберите > , и затем выберите желаемый вариант блока с тепловыми портами: , , или . Это действие отображает тепловые порты на значке блока и отсоединяет параметры Thermal Port и Temperature Dependence. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты медного сопротивления и потерь в железе, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Допущения и ограничения
Этот блок имеет нижеследующие ограничения:
Для модели 2D данных статор статора взаимная индуктивность, заданная значением параметров Stator mutual inductance, Ms, является постоянной в процессе моделирования и не меняется в зависимости от угла ротора. Это означает, что блок подходит для моделирования большей части PMSM и бесщеточных двигателей постоянного тока, но не переключенных двигателей нежелания.
3-D и 4-D модели данных принимают симметрию, так, чтобы зависимость от потокосцепления от токов и угла ротора для обмоток B и C могла быть определена из этого для обмотки A.
Для 4-D модели данных рассмотрите требования к памяти при фиксации независимых значений параметров (три тока и углы ротора). Опция линейной интерполяции использует меньше памяти, но опция сплайн-интерполяции более точна для данного независимого интервала параметра.
Модель потерь в железе принимает синусоидальные токи.
Порты
Сохранение
развернуть все
a — Связь A-фазы
электрический
Электрический порт сохранения сопоставлен со связью A-фазы.
b — Связь B-фазы
электрический
Электрический порт сохранения сопоставлен со связью B-фазы.
c — Связь C-фазы
электрический
Электрический порт сохранения сопоставлен со связью C-фазы.
n — Нейтральная фаза
электрический
Электрический порт сохранения сопоставлен с нейтральной фазой.
C — Моторный случай
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с моторным случаем.
R — Моторный ротор
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с моторным ротором.
HA — Обмотка теплового порта
тепловой
Тепловой порт сохранения, сопоставленный с обмоткой A. Для получения дополнительной информации смотрите Тепловые Порты.
HB — Обмотка B тепловой порт
тепловой
Тепловой порт сохранения, сопоставленный с обмоткой B. Для получения дополнительной информации смотрите Тепловые Порты.
HC — Обмотка C тепловой порт
тепловой
Тепловой порт сохранения, сопоставленный с обмоткой C. Для получения дополнительной информации смотрите Тепловые Порты.
HR — Ротор тепловой порт
тепловой
Тепловой порт сохранения сопоставлен с ротором. Для получения дополнительной информации смотрите Тепловые Порты.
Параметры
развернуть все
Электрический (2D вариант данных о частной производной)
Эта настройка параметров Electrical соответствует 2D вариантам Блока данных Частной производной, с или без тепловых портов. Если вы используете 3-D Данные о Частной производной, 4-D Данные о Частной производной или 3-D вариант Flux Linkage Data блока, смотрите Электрический (3-D Вариант Данных о Частной производной), Электрический (4-D Вариант Данных о Частной производной), или Электрический (3-D Вариант Данных о Потокосцеплении) соответственно.
Parameterization — Метод параметризации
Assume constant mutual inductance - tabulate with phase current and rotor angle (значение по умолчанию) | Assume sinusoidal back emf - tabulate with d- and q-axis currents
Выберите метод параметризации:
Assume constant mutual inductance - tabulate with phase current and rotor angle — Этот метод принимает, что поток, соединяющий каждую обмотку, зависит нелинейно только от тока в той же самой обмотке плюс угол ротора.
Assume sinusoidal back emf - tabulate with d- and q-axis currents — Этот метод принимает, что поток, соединяющий каждую обмотку, зависит нелинейно от всего статора извилистые токи. Это также принимает, что потокосцепление постоянного магнита является синусоидальным. Эта опция обычно является подходящим вариантом для внутреннего магнита PMSMs (или IPMSMs).
Winding type — Настройка обмоток статора
Wye-wound (значение по умолчанию) | Delta-wound
Выберите настройку для обмоток статора:
Wye-wound — Обмотки статора являются раной Уая.
Delta-wound — Обмотки статора являются раной дельты. a - фаза соединяется между портами a и b, b - фазой между портами b и c и c - фаза между портами c и a.
Current vector, i — Вектор из токов
[-2, 0, 2] A (значение по умолчанию)
Вектор из токов, соответствующих обеспеченным частным производным потокосцепления. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume constant mutual inductance - tabulate with phase current and rotor angle.
Rotor angle vector, theta — Вектор из углов ротора
[0, 20, 40, 60] deg (значение по умолчанию)
Вектор из углов ротора, соответствующих обеспеченным частным производным потокосцепления. Вектор должен запуститься в нуле. Это значение соответствует углу, где магнитный поток A-фазы выравнивает с ротором постоянное магнитное пиковое направление потока (прямая ось или dось. Последнее значение, Θ макс., должно быть углом ротора, где шаблон потокосцепления достигает максимума снова. Поэтому количество пар полюса является 360/Θmax, если Θ макс. описывается в градусах. Значение по умолчанию соответствует 6 парным полюсом двигателям.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume constant mutual inductance - tabulate with phase current and rotor angle.
Flux linkage partial derivative wrt current, dPhi(i,theta)/di — Частная производная потокосцепления относительно тока
0.0002*ones(3,4)
Wb/A (значение по умолчанию)
Матрица частных производных потокосцепления относительно тока, заданного как функция текущего вектора и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов. Значение по умолчанию соответствует особому случаю, где индуктивность статора не зависит от текущего статора или от угла ротора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume constant mutual inductance - tabulate with phase current and rotor angle.
Flux linkage partial derivative wrt angle, dPhi(i,theta)/dtheta — Частная производная потокосцепления относительно угла
[0, -0.16, 0.16, 0; 0, -0.16, 0.16, 0; 0, -0.16, 0.16, 0] Wb/rad (значение по умолчанию)
Матрица частных производных потокосцепления относительно угла ротора, заданного как функция текущего вектора и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов. Значением по умолчанию является [0, -0.16, 0.16, 0; 0, -0.16, 0.16, 0; 0, -0.16, 0.16, 0] Wb/rad, который соответствует особому случаю, где индуктивность статора не зависит от текущего статора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume constant mutual inductance - tabulate with phase current and rotor angle.
Direct axis current vector, id — Прямая ось текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из d- токи оси, соответствующие обеспеченной индуктивности. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume sinusoidal back emf - tabulate with d- and q-axis currents.
Quadrature axis current vector, iq — Квадратурная ось текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из q- токи оси, соответствующие обеспеченной индуктивности. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume sinusoidal back emf - tabulate with d- and q-axis currents.
Ld matrix, Ld(id,iq) — Матрица Ld
0.0002*ones(3,3)
H (значение по умолчанию)
Матрица d- составляющие индукции относительно тока, заданного как функция d- ось и q- ось текущие векторы.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume sinusoidal back emf - tabulate with d- and q-axis currents.
Lq matrix, Lq(id,iq) — Матрица Lq
0.0002*ones(3,3)
H (значение по умолчанию)
Матрица q- составляющие индукции относительно тока, заданного как функция d- ось и q- ось текущие векторы.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume sinusoidal back emf - tabulate with d- and q-axis currents.
Permanent magnet flux linkage, PM(id,iq) — Потокосцепление постоянного магнита
0.1*ones(3,3)
Wb (значение по умолчанию)
Матрица потокосцеплений постоянного магнита относительно тока, заданного как функция d- ось и q- ось текущие векторы. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume sinusoidal back emf - tabulate with d- and q-axis currents.
Number of pole pairs Количество пар полюсов
6
Количество электродвигателя с постоянным магнитом подпирает пары шестами.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume sinusoidal back emf - tabulate with d- and q-axis currents.
Calculate torque matrix? — Электромагнитная спецификация данных о крутящем моменте
Yes (значение по умолчанию) | No — specify directly
Задайте способ обеспечить электромагнитные данные о крутящем моменте:
Да — блок вычисляет крутящий момент от информации о потокосцеплении как функция угла ротора и текущих.
No — specify directly — Введите электромагнитные данные о крутящем моменте непосредственно, при помощи параметра Torque matrix, T(i,theta).
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume constant mutual inductance - tabulate with phase current and rotor angle. Если вы устанавливаете параметр Parameterization на Assume sinusoidal back emf - tabulate with d- and q-axis currents, уравнение для крутящего момента является явным в терминах предоставленных матриц.
Torque matrix, T(i,theta) — Матрица крутящего момента
zeros(3, 3, 3, 4)
N*m (значение по умолчанию)
Укажите, что матрица электромагнитного крутящего момента применилась к ротору как функция угла ротора и текущих. Этот параметр отображается, только если Calculate torque matrix? установлен в No — specify directly.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Calculate torque matrix? на No — specify directly.
Interpolation method метод интерполяции
Linear
Smooth (значение по умолчанию)
Выберите один из следующих методов интерполяции для аппроксимации итогового значения, когда исходное значение находится между двумя последовательными узлами решетки:
Linear — Использует расширение линейного алгоритма для многомерной интерполяции. Выберите эту опцию, чтобы получить лучшую эффективность.
Smooth — Использует модифицированный алгоритм Интерполяции Акима. Выберите эту опцию, чтобы создать непрерывную поверхность с непрерывными производными первого порядка.
Для получения дополнительной информации о методах интерполяции смотрите страницу с описанием блока PS Lookup Table (2D).
Stator resistance per phase, Rs — Сопротивление статора на фазу
0.013 Ohm (значение по умолчанию)
Сопротивление каждой из обмоток статора.
Stator mutual inductance, Ms — Статор взаимная индуктивность
0.00002 H (значение по умолчанию)
Взаимная индуктивность статора статора, которая принята, чтобы быть независимой и от текущего угла и от угла ротора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Parameterization на Assume constant mutual inductance - tabulate with phase current and rotor angle.
Stator zero-sequence inductance, L0 — Индуктивность нулевой последовательности статора
0.00016 H (значение по умолчанию)
Индуктивность нулевой последовательности.
Зависимости
Чтобы включить этот параметр, установите Parameterization на Assume sinusoidal back emf - tabulate with d- and q-axis currents.
Электрический (3-D вариант данных о частной производной)
Эта настройка параметров Electrical соответствует 3-D вариантам Блока данных Частной производной, с или без тепловых портов. Если вы используете 2D Данные о Частной производной, 4-D Данные о Частной производной или 3-D вариант Flux Linkage Data блока, смотрите Электрический (2D Вариант Данных о Частной производной), Электрический (4-D Вариант Данных о Частной производной), или Электрический (3-D Вариант Данных о Потокосцеплении) соответственно.
Winding type — Настройка обмоток статора
Wye-wound (значение по умолчанию) | Delta-wound
Выберите настройку для обмоток статора:
Wye-wound — Обмотки статора являются раной Уая.
Delta-wound — Обмотки статора являются раной дельты. a - фаза соединяется между портами a и b, b - фазой между портами b и c и c - фаза между портами c и a.
Direct-axis current vector, iD — Прямая ось текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из токов прямой оси, соответствующих обеспеченным частным производным потокосцепления. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
Quadrature-axis current vector, iQ — Квадратурная ось текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из токов квадратурной оси, соответствующих обеспеченным частным производным потокосцепления. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
Rotor angle vector, theta — Угловой вектор ротора
[0, 20, 40, 60] deg (значение по умолчанию)
Вектор из углов ротора, соответствующих обеспеченным частным производным потокосцепления. Вектор должен запуститься в нуле. Это значение соответствует углу, где магнитный поток A-фазы выравнивает с ротором постоянное магнитное пиковое направление потока (прямая ось или dось. Последнее значение, Θ макс., должно быть углом ротора, где шаблон потокосцепления достигает максимума снова. Поэтому количество пар полюса является 360/Θmax, если Θ макс. описывается в градусах. Значение по умолчанию соответствует 6 парным полюсом двигателям.
A-phase flux linkage partial derivative wrt iA, dPhiA(iD,iQ,theta)/diA — Частная производная потокосцепления A-фазы относительно iA
zeros(3, 3, 4)
Wb/A (значение по умолчанию)
Матрица частных производных потокосцепления A-фазы относительно тока в обмотке A, заданный как функция двух текущих векторов и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
A-phase flux linkage partial derivative wrt iB, dPhiA(iD,iQ,theta)/diB — Частная производная потокосцепления A-фазы относительно iB
zeros(3, 3, 4)
Wb/A (значение по умолчанию)
Матрица частных производных потокосцепления A-фазы относительно тока в обмотке B, заданный как функция двух текущих векторов и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
A-phase flux linkage partial derivative wrt iC, dPhiA(iD,iQ,theta)/diC — Частная производная потокосцепления A-фазы относительно iC
zeros(3, 3, 4)
Wb/A (значение по умолчанию)
Матрица частных производных потокосцепления A-фазы относительно тока в обмотке C, заданный как функция двух текущих векторов и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
A-phase flux linkage partial derivative wrt angle, dPhiA(iD,iQ,theta)/dtheta — Частная производная потокосцепления A-фазы относительно угла
zeros(3, 3, 4)
Wb/rad (значение по умолчанию)
Матрица частных производных потокосцепления A-фазы относительно угла ротора, заданного как функция двух текущих векторов и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
Torque matrix, T(iD,iQ,theta) — Матрица крутящего момента
zeros(3, 3, 4)
N*m (значение по умолчанию)
Укажите, что матрица электромагнитного крутящего момента применилась к ротору как функция этих двух токов и угла ротора.
Interpolation method метод интерполяции
Linear (значение по умолчанию) | Smooth
Выберите один из следующих методов интерполяции для аппроксимации итогового значения, когда исходное значение находится между двумя последовательными узлами решетки:
Linear — Использует расширение линейного алгоритма для многомерной интерполяции. Выберите эту опцию, чтобы получить лучшую эффективность.
Smooth — Использует модифицированный алгоритм Интерполяции Акима. Выберите эту опцию, чтобы создать непрерывную поверхность с непрерывными производными первого порядка.
Для получения дополнительной информации о методах интерполяции смотрите страницу с описанием блока PS Lookup Table (3D).
Stator resistance per phase, Rs — Сопротивление статора на фазу
0.013 Ohm (значение по умолчанию)
Сопротивление каждой из обмоток статора.
Электрический (4-D вариант данных о частной производной)
Эта настройка параметров Electrical соответствует 4-D вариантам Блока данных Частной производной, с или без тепловых портов. Если вы используете 2D Данные о Частной производной, 3-D Данные о Частной производной или 3-D вариант Flux Linkage Data блока, видят Электрический (2D Вариант Данных о Частной производной), Электрический (3-D Вариант Данных о Частной производной), или Электрический (3-D Вариант Данных о Потокосцеплении) соответственно.
Winding type — Настройка обмоток статора
Wye-wound (значение по умолчанию) | Delta-wound
Выберите настройку для обмоток статора:
Wye-wound — Обмотки статора являются раной Уая.
Delta-wound — Обмотки статора являются раной дельты. a - фаза соединяется между портами a и b, b - фазой между портами b и c и c - фаза между портами c и a.
A-phase current vector, iA — A-фаза текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из токов A-фазы, соответствующих обеспеченным частным производным потокосцепления. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
B-phase current vector, iB — B-фаза текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из токов B-фазы, соответствующих обеспеченным частным производным потокосцепления. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
C-phase current vector, iC — C-фаза текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из токов C-фазы, соответствующих обеспеченным частным производным потокосцепления. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
Rotor angle vector, theta — Угловой вектор ротора
[0, 20, 40, 60] deg (значение по умолчанию)
Вектор из углов ротора, соответствующих обеспеченным частным производным потокосцепления. Вектор должен запуститься в нуле. Это значение соответствует углу, где магнитный поток A-фазы выравнивает с ротором постоянное магнитное пиковое направление потока (прямая ось или dось. Последнее значение, Θ макс., должно быть углом ротора, где шаблон потокосцепления достигает максимума снова. Поэтому количество пар полюса является 360/Θmax, если Θ макс. описывается в градусах. Значение по умолчанию соответствует 6 парным полюсом двигателям.
A-phase flux linkage partial derivative wrt iA, dPhiA(iA,iB,iC,theta)/diA — Частная производная потокосцепления A-фазы относительно iA
zeros(3, 3, 3, 4)
Wb/A (значение по умолчанию)
Матрица частных производных потокосцепления A-фазы относительно тока в обмотке A, заданный как функция трех текущих векторов и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
A-phase flux linkage partial derivative wrt iB, dPhiA(iA,iB,iC,theta)/diB — Частная производная потокосцепления A-фазы относительно iB
zeros(3, 3, 3, 4)
Wb/A (значение по умолчанию)
Матрица частных производных потокосцепления A-фазы относительно тока в обмотке B, заданный как функция трех текущих векторов и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
A-phase flux linkage partial derivative wrt iC, dPhiA(iA,iB,iC,theta)/diC — Частная производная потокосцепления A-фазы относительно iC
zeros(3, 3, 3, 4)
Wb/A (значение по умолчанию)
Матрица частных производных потокосцепления A-фазы относительно тока в обмотке C, заданный как функция трех текущих векторов и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
A-phase flux linkage partial derivative wrt angle, dPhiAiA,iB,iC,theta)/dtheta — Частная производная потокосцепления A-фазы относительно угла
zeros(3, 3, 3, 4)
Wb/rad (значение по умолчанию)
Матрица частных производных потокосцепления A-фазы относительно угла ротора, заданного как функция трех текущих векторов и углового вектора ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
Torque matrix, T(iA,iB,iC,theta) — Матрица крутящего момента
zeros(3, 3, 3, 4)
N*m (значение по умолчанию)
Укажите, что матрица электромагнитного крутящего момента применилась к ротору как функция этих трех токов и угла ротора.
Interpolation method метод интерполяции
Linear (значение по умолчанию) | Smooth
Выберите один из следующих методов интерполяции для аппроксимации итогового значения, когда исходное значение находится между двумя последовательными узлами решетки:
Linear — Использует расширение линейного алгоритма для многомерной интерполяции. Выберите эту опцию, чтобы получить лучшую эффективность.
Smooth — Использует модифицированный алгоритм Интерполяции Акима. Выберите эту опцию, чтобы создать непрерывную поверхность с непрерывными производными первого порядка.
Для получения дополнительной информации о методах интерполяции смотрите страницу с описанием блока PS Lookup Table (3D).
Stator resistance per phase, Rs — Сопротивление статора на фазу
0.013 Ohm (значение по умолчанию)
Сопротивление каждой из обмоток статора.
Электрический (3-D вариант данных о потокосцеплении)
Эта настройка параметров Electrical соответствует 3-D вариантам Блока данных Потокосцепления, с или без тепловых портов. Если вы используете 2D Данные о Частной производной, 3-D Данные о Частной производной или 4-D вариант Partial Derivative Data блока, видят Электрический (2D Вариант Данных о Частной производной), Электрический (3-D Вариант Данных о Частной производной), или Электрический (4-D Вариант Данных о Частной производной), соответственно.
Flux linkage data format — Формат данных потокосцепления
D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta) (значение по умолчанию) | D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta) | A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta) | A-phase flux linkage as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta)
Выберите формат данных потокосцепления, используемый вашим инструментом FE:
D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta)
D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta)
A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta)
A-phase flux linkage as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta)
Winding type — Настройка обмоток статора
Wye-wound (значение по умолчанию) | Delta-wound
Выберите настройку для обмоток статора:
Wye-wound — Обмотки статора являются раной Уая.
Delta-wound — Обмотки статора являются раной дельты. a - фаза соединяется между портами a и b, b - фазой между портами b и c и c - фаза между портами c и a.
Number of pole pairs Количество пар полюсов
4
Количество электродвигателя с постоянным магнитом подпирает пары шестами. Значением по умолчанию является 4.
Park's convention for tabulated data — Соглашение парка для табличных данных
Q leads D, rotor angle measured from A-phase to D-axis (значение по умолчанию) | Q leads D, rotor angle measured from A-phase to Q-axis | D leads Q, rotor angle measured from A-phase to D-axis | D leads Q, rotor angle measured from A-phase to Q-axis
Выберите порядок, и опорный угол для Парка преобразовывают отображение данных данных dq к этим трем обмоткам.
Q leads D, rotor angle measured from A-phase to D-axis — Прямое квадратурой преобразование с углом, измеренным относительно оси d.
Q leads D, rotor angle measured from A-phase to Q-axis — Прямое квадратурой преобразование с углом, измеренным относительно оси q.
D leads Q, rotor angle measured from A-phase to D-axis — Преобразование прямой квадратуры с углом, измеренным относительно оси d.
D leads Q, rotor angle measured from A-phase to Q-axis — Преобразование прямой квадратуры с углом, измеренным относительно оси q.
Direct-axis current vector, iD — Прямая ось текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из токов прямой оси, в которых сведено в таблицу потокосцепление. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta) или A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta).
Quadrature-axis current vector, iQ — Квадратурная ось текущий вектор
[-200, 0, 200] A (значение по умолчанию)
Вектор из токов квадратурной оси, в которых сведено в таблицу потокосцепление. Текущий вектор должен быть двухсторонним (имейте положительные и отрицательные величины).
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta) или A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta).
Peak current magnitude vector, I — Вектор величины максимального тока
[0, 100, 200] A (значение по умолчанию)
Вектор-строка из текущих величин, в которых сведено в таблицу потокосцепление. Первым элементом должен быть нуль. Смежное текущее значение должно быть малым относительно текущих значений, в которых магнитное насыщение начинает происходить. Это вызвано тем, что выведенные частные производные потока неточно указаны в нулевом токе, и так вычисляются в этом первом ненулевом токе вместо этого.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta) или A-phase flux linkage as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta).
Current advance angle, B — Текущий угол усовершенствования
[-180, -90, 0, 90, 180] deg (значение по умолчанию)
Вектор-строка из текущих угловых значений усовершенствования, в которых сведено в таблицу потокосцепление. Текущий угол усовершенствования задан как угол, которым ток приводит квадратуру (Q) ось.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta) или A-phase flux linkage as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta).
Rotor angle vector, theta — Угловой вектор ротора
[[0, 5, 10, 15, 20, 25, 30] deg (значение по умолчанию)
Вектор из углов ротора, под которыми сведено в таблицу потокосцепление. Вектор должен запуститься в нуле. Это значение соответствует углу, где магнитный поток A-фазы выравнивает с ротором постоянное магнитное пиковое направление потока (прямая ось или dось. Последнее значение, Θ макс., должно быть углом ротора, где шаблон потокосцепления достигает максимума снова. Поэтому количество пар полюса является 360/Θmax, если Θ макс. описывается в градусах. Значение по умолчанию соответствует 4 парным полюсом двигателям.
Если Flux linkage data format является D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta) или D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta) (то есть, если вы сводите в таблицу D и данные о потокосцеплении Q), затем угловой вектор ротора должен иметь четыре или больше точки и диапазон от 0 до 120/N степеней, где N является количеством пар полюса. Если Flux linkage data format является A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta) или A-phase flux linkage as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta) (то есть, если вы сводите в таблицу данные о потокосцеплении A-фазы), затем угловой вектор ротора должен иметь 3n+1 точки, где n> =2, и область значений должен быть от 0 до 360/3/N степеней.
D-axis flux linkage, Fd(iD,iQ,theta) — Потокосцепление D-оси
zeros(3, 3, 7)
Wb (значение по умолчанию)
Матрица d - потокосцепление оси, заданное как функция токов dq и угловой вектор ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
Если ваши данные о потоке даны в различном порядке, можно использовать permute функционируйте, чтобы переупорядочить его. Для примера этого переупорядочения см. связанный скрипт MATLAB в Импорте Данные о Потокосцеплении IPMSM от Максвелла ANSYS.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta).
Q-axis flux linkage, Fq(iD,iQ,theta) — Потокосцепление Q-оси
zeros(3, 3, 7)
Wb (значение по умолчанию)
Матрица q - потокосцепление оси, заданное как функция токов dq и угловой вектор ротора. Потокосцепление является потоком, умноженным на количество обмотки поворотов.
Если ваши данные о потоке даны в различном порядке, можно использовать permute функционируйте, чтобы переупорядочить его. Для примера этого переупорядочения см. связанный скрипт MATLAB в Импорте Данные о Потокосцеплении IPMSM от Максвелла ANSYS.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta).
D-axis flux linkage, Fd(I,B,theta) — Потокосцепление D-оси
zeros(3, 5, 7)
Wb (значение по умолчанию)
3-D матрица d - значения потокосцепления оси как функция Peak current magnitude vector, I, Current advance angle, B и Rotor angle vector, theta.
Если ваши данные о потоке даны в различном порядке, можно использовать permute функционируйте, чтобы переупорядочить его. Для примера этого переупорядочения см. связанный скрипт MATLAB в Импорте Данные о Потокосцеплении IPMSM от Максвелла ANSYS.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta).
Q-axis flux linkage, Fq(I,B,theta) — Потокосцепление Q-оси
zeros(3, 5, 7)
Wb (значение по умолчанию)
3-D матрица q - значения потокосцепления оси как функция Peak current magnitude vector, I, Current advance angle, B и Rotor angle vector, theta.
Если ваши данные о потоке даны в различном порядке, можно использовать permute функционируйте, чтобы переупорядочить его. Для примера этого переупорядочения см. связанный скрипт MATLAB в Импорте Данные о Потокосцеплении IPMSM от Максвелла ANSYS.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta).
A-phase flux linkage, F(iD,iQ,theta) — Потокосцепление A-фазы
zeros(3, 3, 7)
Wb (значение по умолчанию)
3-D матрица значений потокосцепления A-фазы, как функция токов dq и угла ротора.
Если ваши данные о потоке даны в различном порядке, можно использовать permute функционируйте, чтобы переупорядочить его. Для примера этого переупорядочения см. связанный скрипт MATLAB в Импорте Данные о Потокосцеплении IPMSM от Максвелла ANSYS.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta).
A-phase flux linkage, F(I,B,theta) — Потокосцепление A-фазы
zeros(3, 5, 7)
Wb (значение по умолчанию)
3-D матрица значений потокосцепления A-фазы, как функция Peak current magnitude vector, I, Current advance angle, B и Rotor angle vector, theta.
Если ваши данные о потоке даны в различном порядке, можно использовать permute функционируйте, чтобы переупорядочить его. Для примера этого переупорядочения см. связанный скрипт MATLAB в Импорте Данные о Потокосцеплении IPMSM от Максвелла ANSYS.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta).
Torque matrix, T(iD,iQ,theta) — Матрица крутящего момента
zeros(3, 3, 7)
N*m (значение по умолчанию)
3-D матрица электромагнитного крутящего момента применилась к ротору как функция токов dq и угла ротора.
Если ваши данные о потоке даны в различном порядке, можно использовать permute функционируйте, чтобы переупорядочить его. Для примера этого переупорядочения см. связанный скрипт MATLAB в Импорте Данные о Потокосцеплении IPMSM от Максвелла ANSYS.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta) или A-phase flux linkage as a function of D-axis current (iD), Q-axis current (iQ), and rotor angle (theta).
Torque matrix, T(I,B,theta) — Матрица крутящего момента
zeros(3, 5, 7)
N*m (значение по умолчанию)
3-D матрица электромагнитного крутящего момента применилась к ротору, как функция Peak current magnitude vector, I, Current advance angle, B и Rotor angle vector, theta.
Если ваши данные о потоке даны в различном порядке, можно использовать permute функционируйте, чтобы переупорядочить его. Для примера этого переупорядочения см. связанный скрипт MATLAB в Импорте Данные о Потокосцеплении IPMSM от Максвелла ANSYS.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Flux linkage data format на D and Q axes flux linkages as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta) или A-phase flux linkage as a function of peak current magnitude (I), current advance angle (B), and rotor angle (theta).
Interpolation method метод интерполяции
Linear (значение по умолчанию) | Smooth
Выберите один из следующих методов интерполяции для аппроксимации итогового значения, когда исходное значение находится между двумя последовательными узлами решетки:
Linear — Использует расширение линейного алгоритма для многомерной интерполяции. Выберите эту опцию, чтобы получить лучшую эффективность.
Smooth — Использует модифицированный алгоритм Интерполяции Акима. Выберите эту опцию, чтобы создать непрерывную поверхность с непрерывными производными первого порядка.
Для получения дополнительной информации о методах интерполяции смотрите страницу с описанием блока PS Lookup Table (4D).
Stator resistance per phase, Rs — Сопротивление статора на фазу
0.013 Ohm (значение по умолчанию)
Сопротивление каждой из обмоток статора.
Stator zero-sequence inductance, L0 — Индуктивность нулевой последовательности статора
0.00016 H (значение по умолчанию)
Индуктивность нулевой последовательности.
Зависимости
Чтобы включить этот параметр, установите Winding type на Delta-Wound.
Потери в железе
Open-circuit iron losses, [P_hysteresis P_eddy P_excess] — Потери в железе разомкнутой цепи
[0.0, 0.0, 0.0]
W (значение по умолчанию)
Вектор-строка, длины 3, потерь в железе разомкнутой цепи из-за гистерезиса, Эдди и избыточных потерь, соответственно, на частоте задан Electrical frequency at which losses determined.
Short-circuit iron losses, [P_hysteresis P_eddy P_excess] — Потери в железе короткой схемы
[0.0, 0.0, 0.0] W (значение по умолчанию)
Вектор-строка, длины 3, потерь в железе короткой схемы из-за гистерезиса, Эдди и избыточных потерь, соответственно, на частоте задан Electrical frequency at which losses determined.
Electrical frequency at which losses determined — Электрическая частота, на которой определяются потери
60 Hz (значение по умолчанию)
Электрическая частота, на которой были измерены разомкнутая цепь и потери в железе короткой схемы.
Short-circuit RMS current for short-circuit iron losses — RMS короткой схемы, текущая для потерь в железе короткой схемы
95 A (значение по умолчанию)
Получившаяся фаза RMS короткой схемы, текущая при измерении потерь короткой схемы.
Механическое устройство
Rotor inertia — Инерция ротора
0.01
kg*m^2 (значение по умолчанию)
Инерция ротора присоединяется к механическому поступательному порту R. Значение может быть нулем.
Rotor damping — Затухание ротора
0 N*m/(rad/s) (значение по умолчанию)
Температурная зависимость
Эти параметры появляются только для блоков с осушенными тепловыми портами. Для получения дополнительной информации смотрите Тепловые Порты.
Measurement temperature — Температура измерения
298.15 K (значение по умолчанию)
Температура, для которой заключаются в кавычки параметры двигателя.
Resistance temperature coefficient — Коэффициент температуры сопротивления
3.93e-3
1/K (значение по умолчанию)
Коэффициент α в сопротивлении связи уравнения температуре, как описано в Тепловой Модели для Блоков Привода. Значение по умолчанию для меди.
Permanent magnet flux temperature coefficient — Коэффициент температуры потока постоянного магнита
-0.001
Дробная скорость изменения плотности потока постоянного магнита с температурой. Это используется, чтобы линейно уменьшать крутящий момент и вызванный коэффициент противо-ЭДС, когда температура повышается.
Тепловой порт
Эти параметры появляются только для блоков с осушенными тепловыми портами. Для получения дополнительной информации смотрите Тепловые Порты.
Thermal mass for each stator winding — Количество тепла для каждой обмотки статора
100 J/K (значение по умолчанию)
Значение количества тепла для A, B, и обмотки C. Количество тепла является энергией, требуемой для повышения температуры на один градус.
Initial stator winding temperatures — Начальный статор извилистые температуры
[298.15, 298.15, 298.15] K (значение по умолчанию)
1 3 вектор-строка, задающий температуру A, B, и тепловые порты C в начале симуляции.
Rotor thermal mass — Количество тепла ротора
200 J/K (значение по умолчанию)
Количество тепла ротора, то есть, энергия, требуемая повысить температуру ротора одной степенью.
Rotor initial temperature — Температура начальной буквы ротора
298.15 K (значение по умолчанию)
Температура ротора в начале симуляции.
Percentage of main flux path iron losses associated with the rotor — Процент основных потерь в железе пути к потоку сопоставлен с ротором
90
Процент основных потерь в железе пути к потоку сопоставлен с магнитным путем через ротор. Это определяет, сколько из нагревания потери в железе приписано ротору тепловой порт HR, и сколько приписано трем извилистым тепловым портам HA, HB и HC.
Percentage of cross-tooth flux path iron losses associated with the rotor — Процент перекрестных зубных потерь в железе пути к потоку сопоставлен с ротором
30
Процент перекрестных зубных потерь в железе пути к потоку сопоставлен с магнитным путем через ротор. Это определяет, сколько из нагревания потери в железе приписано ротору тепловой порт HR, и сколько приписано трем извилистым тепловым портам HA, HB и HC.
Ссылки
[1] Меллор, P.H., Р. Робель и Д. Холидей. “В вычислительном отношении эффективная модель потери в железе для бесщеточных машин AC, которая обслуживает расчетный поток и поле, ослабила операцию”. IEEE Электрическая Конференция по Машинам и Дискам. Май 2009.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Введенный в R2019b