Визуализируйте покрытия датчика, обнаружения и дорожки
Bird's-Eye Scope визуализирует аспекты ведущего сценария, найденного в вашей модели Simulink®.
Используя осциллограф, вы можете:
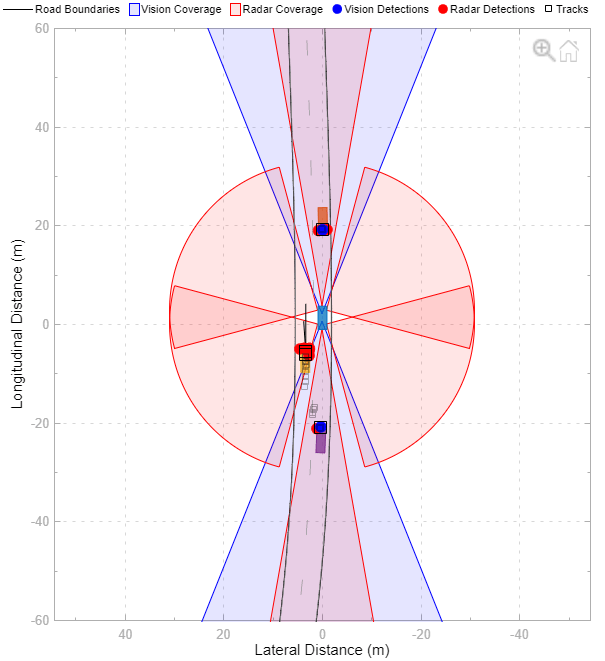
Смотрите зоны охвата радара, видения, и лоцируйте датчики.
Анализируйте обнаружения датчика агентов, дорожных контуров и контуров маршрута.
Анализируйте результаты отслеживания движущихся агентов в рамках сценария.
Чтобы начать, откройте осциллограф и нажмите Find Signals. Осциллограф обновляет блок-схему, находит сигналы, представляющие аспекты ведущего сценария, организует сигналы в группы и отображает сигналы. Можно затем анализировать сигналы, как вы симулируете, организуете сигналы в новые группы и изменяете графический дисплей сигналов.
Для получения дополнительной информации об использовании осциллографа, смотрите, Визуализируют Данные о Датчике и Дорожки в Bird ' s-Eye Scope.
Панель инструментов Simulink:
На вкладке Simulation, под Review Results, нажимают Bird's-Eye Scope.
На вкладке Apps, под Signal Processing and Wireless Communications, нажимают Bird's-Eye Scope.
Longitudinal axis limits — Продольные пределы по осямПродольные пределы по осям в виде [min, max] вектор.
Настраиваемый: да
Lateral axis limits — Боковые пределы по осямБоковые пределы по осям в виде [min, max] вектор.
Настраиваемый: да
Track position selector — Матрица выбора раньше извлекала положения отслеживаемых объектовМатрица выбора раньше извлекала положения дорожек, выведенных блоком Multi-Object Tracker. Осциллограф извлекает положения из векторов состояния дорожек, которые хранятся в State поля выхода отслеживают структуры. Если вы задаете неправильный выбор, то осциллограф отображает неправильные положения дорожки.
Задайте Track position selector как 2 n матрицей нулей и единиц, где n является размером векторов состояния через все дорожки. Эти векторы состояния содержат положение, скорость, ускорение и другую информацию состояния об отслеживаемых объектах.
Матрица выбора по умолчанию выбирает положения дорожки из 3-D вектора состояния постоянной скорости формы [x;vx;y;vy;z;vz]. Для каждой дорожки осциллограф умножает матрицу выбора на вектор состояния, чтобы получить позиционный x и позиционный y, как показано здесь:
[1,0,0,0,0,0; 0,0,1,0,0,0] * [x;vx;y;vy;z;vz] = [x;y]
Для примеров кода MATLAB®, иллюстрирующих этот процесс выбора, смотрите getTrackPositions функция и multiObjectTracker объект.
Форматы вектора состояния и соответствующей матрицы выбора зависят от Фильтра Калмана, который блок Multi-Object Tracker использует для отслеживаемых объектов. Предположим, что блок Multi-Object Tracker инициализируется, чтобы использовать 2D постоянную скорость линейный Фильтр Калмана, где параметр Filter initialization function name блока устанавливается на initcvkf функция. Для этого типа фильтра состояния дорожки имеют форму [x;vx;y;vy]. Чтобы визуализировать положения дорожек, выведенных этим блоком, установите Track position selector на [1,0,0,0; 0,0,1,0].
Настраиваемый: нет
Track velocity selector — Матрица выбора раньше извлекала скорости отслеживаемых объектовМатрица выбора раньше извлекала скорости дорожек, выведенных блоком Multi-Object Tracker. Осциллограф извлекает скорости из векторов состояния дорожек, которые хранятся в State поля выхода отслеживают структуры. Если вы задаете неправильный выбор, то осциллограф отображает неправильные скорости дорожки.
Задайте Track velocity selector как 2 n матрицей нулей и единиц, где n является размером векторов состояния через все дорожки. Эти векторы состояния содержат положение, скорость, ускорение и другую информацию состояния об отслеживаемых объектах.
Матрица выбора по умолчанию выбирает скорости дорожки из 3-D вектора состояния постоянной скорости формы [x;vx;y;vy;z;vz]. Для каждой дорожки осциллограф умножает матрицу выбора на вектор состояния, чтобы получить скорости дорожки в x - направление, vx, и y - направление, vy, как показано здесь:
[0,1,0,0,0,0; 0,0,0,1,0,0] * [x;vx;y;vy;z;vz] = [vx;vy]
Для примеров кода MATLAB, иллюстрирующих этот процесс выбора, смотрите getTrackVelocities функция и multiObjectTracker объект.
Форматы вектора состояния и соответствующей матрицы выбора зависят от Фильтра Калмана, который блок Multi-Object Tracker использует для отслеживаемых объектов. Предположим, что блок Multi-Object Tracker инициализируется, чтобы использовать 2D постоянную скорость линейный Фильтр Калмана, где параметр Filter initialization function name блока устанавливается на initcvkf функция. Для этого типа фильтра состояния дорожки имеют форму [x;vx;y;vy]. Чтобы визуализировать скорости дорожек, выведенных этим блоком, установите Track velocity selector на [0,1,0,0; 0,0,0,1].
Настраиваемый: нет
Display short signal names — Отобразите имена сигнала без информации о путиon (значение по умолчанию) | offВыберите этот параметр, чтобы отобразить короткие имена сигнала (сигналы без информации о пути).
Очистите этот параметр, чтобы отобразить длинные имена сигнала (сигналы с информацией о пути).
Рассмотрите VisionDetection сигнала в подсистеме Sensor Simulation. Когда вы выбираете этот параметр, краткое название, VisionDetection, отображен. Когда вы очищаете этот параметр, длинное имя, Sensor Simulation/VisionDetection, отображен.
Настраиваемый: да
Alpha — Прозрачность зоны охватаПрозрачность зоны охвата в виде действительного скаляра в области значений [0, 1]. Значение 0 делает зону охвата полностью прозрачной. Значение 1 делает зону охвата полностью непрозрачной.
Это свойство доступно только для сигналов в группе Sensor Coverage.
Настраиваемый: да
Velocity Scaling — Масштабный коэффициент в течение продолжительности величины векторов скоростиМасштабный коэффициент в течение продолжительности величины векторов скорости в виде действительного скаляра в области значений [0, 20]. Осциллограф представляет значение вектора величины как M × Velocity Scaling, где M является величиной скорости.
Это свойство доступно только для сигналов в группах Tracks или Detections.
Настраиваемый: да
Общие ограничения
Модели, на которые ссылаются, не поддерживаются. Чтобы визуализировать сигналы, которые являются в моделях, на которые ссылаются, переместите выход этих сигналов к модели верхнего уровня.
Быстрый режим Accelerator не поддерживается.
Если вы инициализируете свою модель в быстром перезапуске, то после того, как первый раз, когда вы симулируете, кнопка Find Signals, отключен. Чтобы включить Find Signals снова, на вкладке Debug панели инструментов Simulink, нажимают Fast Restart.
Ограничения блока читателя сценария
Bird's-Eye Scope не поддерживает визуализацию в модели, которая содержит:
Больше чем один блок Scenario Reader.
Блок Scenario Reader в невиртуальной подсистеме, такой как атомарная или активированная подсистема.
Блок Scenario Reader, который сконфигурирован, чтобы вывести агентов и контуры маршрута в мировых координатах (набор параметров Coordinate system of outputs к World Coordinates).
Поскольку Scenario Reader блокируется, в котором вы задаете автомобиль, оборудованный датчиком с помощью входного порта Ego Vehicle, сигнал автомобиля, оборудованного датчиком должен быть соединен непосредственно с блоком. Визуализация сигналов автомобиля, оборудованного датчиком, которые выводятся от невиртуальной подсистемы или сослались на модель, не поддерживается.
3D ограничения блока симуляции
Визуализация дорог, маршрутов и агентов от блоков Simulation 3D Scene Configuration не поддерживается. Если ваш блок содержит блок Simulation 3D Scene Configuration, Bird's-Eye Scope все еще отображает автомобиль, оборудованный датчиком, но это имеет размерности транспортного средства по умолчанию.
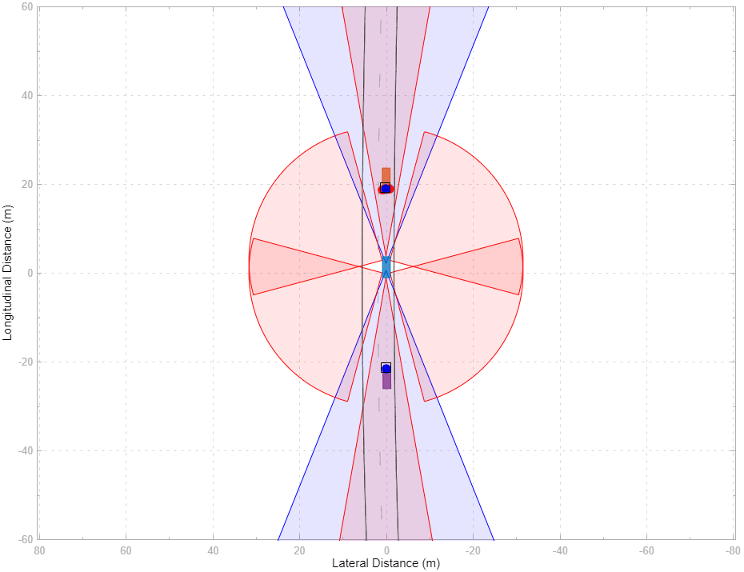
В Bird's-Eye Scope представление по умолчанию отображает ведущий сценарий в vehicle coordinates. В процессе моделирования это представление отображает сценарий с точки зрения автомобиля, оборудованного датчиком. Используйте это представление, чтобы смотреть аспекты сценария в мгновенной близости автомобиля, оборудованного датчиком.
Можно также отобразить ведущий сценарий в world coordinates. На панели инструментов осциллографа нажмите World Coordinates, чтобы открыть окно World Coordinates View. Используйте это окно, чтобы просмотреть сценарий в целом. Можно также использовать это представление, чтобы смотреть траектории агентов, которые не находятся в мгновенной близости автомобиля, оборудованного датчиком.
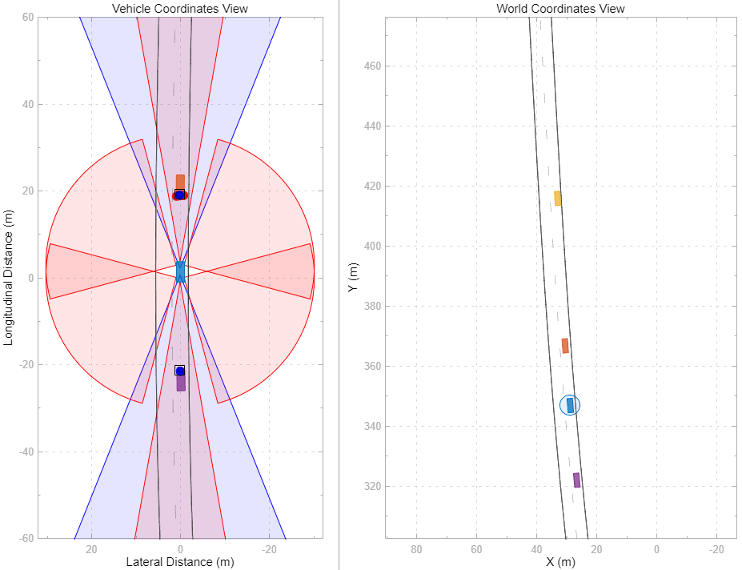
Чтобы отобразить дороги и маршруты в World Coordinates View, нажмите Find Signals. Чтобы отобразить автомобиль, оборудованный датчиком и других агентов в сценарии, запустите симуляцию. Это представление не отображает обнаружения, дорожки, зоны охвата датчика и другие применимые сигналы. Можно просмотреть эти сигналы только в окне Vehicle Coordinates View.
Примечание
В окне World Coordinates View круг вокруг автомобиля, оборудованного датчиком подсвечивает местоположение транспортного средства в сценарии. Это не зона охвата датчика.
Чтобы найти источник сигнала в модели, на левой панели осциллографа, щелкают правой кнопкой по сигналу и выбирают Highlight in Model.
Можно показать или скрыть сигналы при симуляции. Например, чтобы скрыть покрытие датчика, сначала выберите его из левой панели. Затем от вкладки Properties снимите флажок Show Sensor Coverage.
Когда вы вновь открыли осциллограф после сохранения и закрытия модели, холст осциллографа первоначально пуст. Нажмите Find Signals, чтобы найти сигналы снова. Сигналы имеют те же свойства от того, когда вы продержались сохраненный модель.
Если симуляция запускается слишком быстро, можно замедлить ее при помощи следующей симуляции. На вкладке Simulation панели инструментов Simulink выберите Run> Simulation Pacing. Затем выберите Enable, следующий, чтобы замедлить флажок симуляции и уменьшить время симуляции к меньше, чем значение по умолчанию одной секунды на настенные вторые часы.
Чтобы лучше смотреть сценарий, можно панорамировать и масштабировать в окнах Vehicle Coordinates View и World Coordinates View. Чтобы возвратиться к отображению по умолчанию любого окна, в верхнем правом углу того окна, нажимают кнопку "Домой"![]() .
.
Detection Concatenation | Driving Radar Data Generator | Lidar Point Cloud Generator | Multi-Object Tracker | Scenario Reader | Simulation 3D Lidar | Simulation 3D Probabilistic Radar | Simulation 3D Vision Detection Generator | Vision Detection Generator
