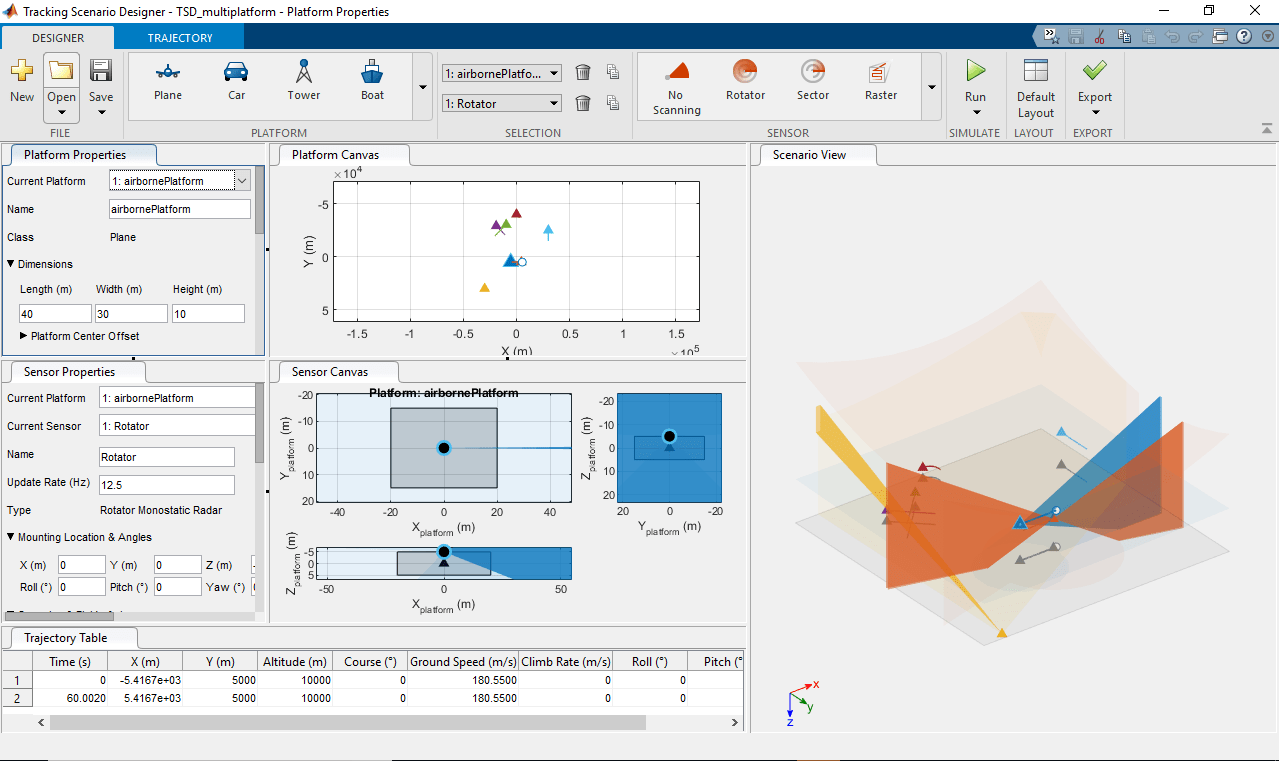
Спроектируйте сценарии отслеживания, сконфигурируйте платформы и датчики, и сгенерируйте синтетические обнаружения объектов
Приложение Tracking Scenario Designer позволяет вам спроектировать и визуализировать сценарии отслеживания синтетического продукта для тестирования вашей оценки и систем слежения.
Используя приложение, вы можете:
Создайте платформы (включая плоскости, автомобили, башни и лодки) использование интерактивного интерфейса и сконфигурируйте свойства платформы в сценарии отслеживания.
Сконфигурируйте 2D или 3D траектории (включая положение, ориентацию и скорости) платформ с помощью waypoint траектории в сценарии отслеживания.
Создайте радарные датчики, смонтированные на платформе, и сконфигурируйте свойства датчика.
Симулируйте сценарий отслеживания и динамически визуализируйте траектории платформы, покрытия датчика и обнаружения объектов.
Сгенерируйте код MATLAB® сценария и датчиков, и затем программно измените сценарий в целях приложения. Можно также импортировать ранее сохраненный сценарий назад в приложение для дальнейшей симуляции.
Импортируйте trackingScenario объект в приложении для визуализации и дальнейшем проекте сценария отслеживания. Смотрите Программируемое Использование для ограничений импорта trackingScenario объект.
Панель инструментов MATLAB: На вкладке Apps, под Signal processing and communications, кликают по значку приложения![]() .
.
Командная строка MATLAB: Войти trackingScenarioDesigner.
Чтобы запустить Tracking Scenario Designer, используйте команду:
trackingScenarioDesigner
Чтобы добавить платформу в приложении, выберите одну платформу (башня, например) формируют вкладку PLATFORM и нажимают Platform Canvas, чтобы поместить платформу.
![]()
Можно изменить свойства платформы через вкладку Platform Properties. Например, чтобы установить центр платформы до начала координат, обнулите все координаты исходного положения в Начальном Положении.
![]()
Можно также изменить Длину, Ширину и Высоту платформы. По умолчанию, Tower смещение платформы в z направлении является половиной высоты платформы, которая размещает центр башни в его нижней части. Если смещение является нулем, то центр платформы располагает с геометрическим центром башни.
![]()
Центральное смещение задано как радиус-вектор от геометрического центра платформы к заданному центру платформы.
В приложении можно также задать неопределенность в предполагаемом положении платформы через вкладку Pose Estimation. Значение каждого параметра во вкладке представляет стандартное отклонение соответствующего количества. Настройка стандартного отклонения полезна для некоторых практических факторов отслеживания. Например, на точность датчика, смонтированного на башне, влияют, если положение башни включает ошибки. В приложении, если вы устанавливаете стандартные отклонения быть ненулевыми значениями для платформы с монтирующимся датчиком, можно наблюдать погрешность обнаружений датчика, введенных этими стандартными отклонениями.
![]()
Можно также добавить другие платформы в приложении. Добавьте Плоскую платформу на холсте и установите его исходное положение как [50,-50, 100]. Вы видите, что центр (красной) плоскости в ее геометрическом центре по умолчанию.
![]()
Можно изменить настройку по умолчанию любого класса (и задать новые классы), использование Редактора галереи Platform, который можно открыть путем нажатия на выпадающую стрелу на вкладке PLATFORM.
![]()
Вы не можете отредактировать класс в настоящее время используемой платформы. Чтобы удалить платформу, выберите платформу из выпадающего списка и щелкните удалить (корзина) значок.
![]()
Чтобы запустить Tracking Scenario Designer, используйте команду:
trackingScenarioDesigner
Добавьте Plane платформа на холсте платформы и место плоскость в [0, 0, 1000] путем определения ее исходного положения через вкладку Initial Pose как:
![]()
Затем добавьте несколько waypoints в платформу. Щелкните правой кнопкой по платформе и выберите Add Waypoints, или выберите платформу и нажмите Waypoints на панели инструментов TRAJECTORY. Затем последовательно кликните по холсту, чтобы добавить waypoints. Чтобы закончить действие, на клавиатуре, нажимают Enter. Можно перетащить waypoints, чтобы изменить траекторию. Заданная траектория представляет траекторию центра платформы, заданного во вкладке Platform Center Offset.
![]()
На вкладке TRAJECTORY, если Курс Траектории и параметры Ориентации Платформы установлены в автоматический, приложение вычисляет траекторию путем подбора кривой плавной кривой включая весь waypoints и выравнивания ориентации платформы с траекторией. С набором Времени к Автоматическому приложение вычисляет длительность траектории (Время) на основе скорости платформы по умолчанию, которая может быть задана через Редактор Галереи PLATFORM.
![]()
Чтобы отобразить приведенную ниже таблицу траектории, нажмите Trajectory Table. Чтобы отобразить график Высоты Времени, нажмите Time-Altitude Plot.
![]()
После изменения выбора параметра траектории от Автоматического до Таблицы можно отредактировать соответствующее количество в Таблице Траектории. После того, как вы редактируете таблицу, наблюдаете изменение траектории.
Можно перетащить точки вверх и вниз в высоте в графике Высоты Времени. После установки Time to Table можно перетащить точки вперед и назад вовремя.
![]()
Чтобы удалить траекторию, выберите траекторию и нажмите Delete Trajectory.
![]()
MAT-файл TSD_Platforms было ранее сохранено с сеансом сценария отслеживания. Чтобы запустить приложение и загрузить файл сеанса, используйте команду:
trackingScenarioDesigner('TSD_Platforms.mat')
Приложение открывает и загружает сценарий. Сценарий содержит две платформы:
Башня 60 метров высотой, расположенная в начале координат локальной системы координат NED.
Цель, перемещающаяся на скорости курса 750 м/с вокруг башни.
![]()
Затем смонтируйте датчик на верхней части башни, чтобы контролировать ее среду. Существует четыре предопределенных класса датчиков, доступных в приложении.
![]()
Можно также кликнуть по выпадающей стреле, чтобы отредактировать существующие классы или добавить новые классы датчиков.
В приложении вы выбираете платформу мачты, выбираете датчик вращающего устройства и помещаете его в верхнюю часть башни. Нажмите кнопку проекции, чтобы включить y-z представление проекции.
![]()
Датчик расположен в нижней части башни по умолчанию. Чтобы переместить датчик в верхнюю часть башни, измените ее Mounting Location & Angles.
![]()
Включите обнаружение в вертикальном изменении путем выбора Report Elevation. Установите Поле зрения датчика для Вертикального изменения к 15 градусам позволять широкую зону обслуживания в вертикальном изменении. Установите Механические пределы скана для Вертикального изменения к [-15,-5] градус, чтобы позволить датчику "смерить взглядом".
![]()
Чтобы симулировать сценарий отслеживания и наблюдать обнаружение цели, сгенерированной датчиком, Нажмите Run. (Можно также выбрать Run Without Detections.)
![]()
Вы находите, что датчик генерирует только одно обнаружение. Можно позволить датчику отсканировать быстрее и сгенерировать больше обнаружений путем корректировки его частоты развертки с помощью двух параметров:
Частота обновления — Решает, что количество поля зрения нарезает шаги датчика через в секунду.
Поле зрения — Определяет ширину каждого среза поля зрения датчика или луча.
В приложении увеличьте Частоту обновления датчика к 200 Гц. С азимутальным набором поля зрения как 1 градус получившаяся частота развертки в азимуте составляет 200 градусов/с, который является выше частоты развертки Max по умолчанию (75 градусов/с). Увеличьте частоту развертки Max до 300 градусов/с, чтобы позволить высокую частоту развертки.
Нажмите Run, чтобы симулировать сценарий снова. Датчик теперь генерирует несколько наборов обнаружений.
![]()
Можно также экспортировать скрипт сценария путем нажатия на Export. Используя экспортируемый скрипт, можно изменить сценарий programactically и использовать сгенерированный сценарий, чтобы протестировать различные алгоритмы отслеживания. См. Проект и Симулируйте Сценарий Отслеживания с примером Tracking Scenario Designer для получения дополнительной информации о том, как изменить сгенерированный сценарий.
Platform Properties — Свойства платформы включая размерности, положение и RCSЧтобы включить параметры Platform Properties, добавьте по крайней мере одну платформу в сценарий. Затем выберите платформу или из Platform Canvas или из параметра Platform Properties. Значения параметров во вкладке Platform Properties основаны на платформе, которую вы выбираете.
| Параметр | Описание |
|---|---|
| Current Platform | В настоящее время выбранная платформа в виде списка платформ в сценарии. |
| Name | Имя платформы в виде строки. |
| Class | Класс платформы в виде |
Можно изменить настройки по умолчанию (такие как Speed) четырех классов платформы и добавить новые классы платформы с помощью Platform Gallery Editor. Можно открыть редактор путем нажатия на выпадающую стрелу на вкладке PLATFORM и выбора Add/Edit Platform Gallery.
Dimensions — Размерности платформыРазмерности платформы в виде Length, Width и Height в метрах.
| Параметр | Описание |
|---|---|
| Length (m) | Длина платформы в виде неотрицательного скаляра в метрах. |
| Width (m) | Ширина платформы в виде неотрицательного скаляра в метрах. |
| Height (m) | Высота платформы в виде неотрицательного скаляра в метрах. |
Можно также задать Platform Center Offset с помощью X, Y и смещений Z. Смещение измеряется от геометрического центра платформы к заданному центру.
| Параметр | Описание |
|---|---|
| X (m) | Возместите в направлении X в виде скаляра в метрах. |
| Y (m) | Возместите в направлении Y в виде скаляра в метрах. |
| Z (m) | Возместите в z-направлении в виде скаляра в метрах. |
Initial Pose — Исходное положение и ориентация платформыИсходное положение и ориентация платформы, заданной тремя координатами положения X, Y и Altitude в метрах и трех вращательных углах Roll, Pitch и Yaw в градусах.
| Параметр | Описание |
|---|---|
| X (m) | Начальная буква x координата платформы сосредотачивается в системе координат сценария в виде скаляра в метрах. |
| Y (m) | Начальная буква y координата платформы сосредотачивается в системе координат сценария в виде скаляра в метрах. |
| Altitude (m) | Начальная высота платформы сосредотачивается в системе координат сценария в виде скаляра в метрах. |
| Roll (°) | Угол ориентации платформы об оси X сценария структурирует в виде скаляра в градусах. |
| Pitch (°) | Угол ориентации платформы об оси Y сценария структурирует в виде скаляра в градусах. |
| Yaw (°) | Угол ориентации платформы об оси z сценария структурирует в виде скаляра в градусах. |
Pose Estimation — Точность платформы излагает оценкуТочность платформы излагает оценку в виде стандартных отклонений для трех вращательных углов: Roll, Pitch, и Yaw и два поступательных количества движения: Position и Velocity.
Когда значение стандартного отклонения любого количества движения задано как ненулевое, положение платформы содержит ошибки, соответствующие тому количеству движения.
| Параметр | Описание |
|---|---|
| Roll (°) | Стандартное отклонение угла вращения платформы в виде скаляра в градусах. |
| Pitch (°) | Стандартное отклонение угла тангажа платформы в виде скаляра в градусах. |
| Yaw (°) | Стандартное отклонение угла рыскания платформы в виде скаляра в градусах. |
| Position (m) | Стандартное отклонение координат положения платформы в виде скаляра в градусах. |
| Velocity (m) | Стандартное отклонение скоростных координат платформы в виде скаляра в градусах. |
Radar Cross Section — Радарная информация о сеченииРадарная информация о сечении, включая информацию о шаблоне RCS и технические требования Средства просмотра RCS. Можно задать постоянный шаблон RCS как скаляр в dBsm, или можно импортировать информацию RCS через окно Import Signature после выбора вкладки Import RCS.
| Параметр | Описание |
|---|---|
| Constant RCS Pattern | Шаблон RCS в виде положительной константы в dBsm. |
| Import RCS | Импортируйте шаблон RCS через окно Import Signature. |
Можно также задать RCS Viewer путем изменения Elevation Cut в градусах и Frequency Cut в Гц.
| Параметр | Описание |
|---|---|
| Elevation Cut | Сокращение вертикального изменения средства просмотра RCS в виде скаляра в градусах. |
| Frequency Cut | Сокращение частоты средства просмотра RCS в виде скаляра в Гц. |
Sensor Properties — Свойства датчика включая монтирование датчика, сканируя настройки и настройки обнаруженияЧтобы включить параметры Sensor Properties, добавьте по крайней мере один датчик в платформу. Затем выберите датчик или из Sensor Canvas или из вкладки Sensor Properties. Значения параметров во вкладке Sensor Properties основаны на платформе и датчике, который вы выбираете.
| Параметр | Описание |
|---|---|
| Current Platform | Текущая платформа, на которой датчик смонтирован в виде списка платформ в сценарии. |
| Current Sensor | В настоящее время выбранный датчик в виде списка датчиков в сценарии. |
| Name | Имя датчика в виде строки. |
| Update Rate | Частота обновления датчика в виде положительной скалярной величины в Гц. |
| Type | Тип датчика в виде:
|
Mounting Location & Angles — Местоположение монтирования датчика и углыМестоположение монтирования датчика и углы на платформе, заданной тремя координатами положения X, Y и Z в метрах и трех вращательных углах Roll, Pitch и Yaw в градусах.
| Параметр | Описание |
|---|---|
| X (m) | x координата датчика на платформе структурируют в виде скаляра в метрах. |
| Y (m) | y координата датчика на платформе структурируют в виде скаляра в метрах. |
| Z (m) | z координата датчика на платформе структурируют в виде скаляра в метрах. |
| Roll (°) | Угол ориентации датчика об оси X платформы структурирует в виде скаляра в градусах. |
| Pitch (°) | Угол ориентации датчика об оси Y платформы структурирует в виде скаляра в градусах. |
| Yaw (°) | Угол ориентации датчика об оси z платформы структурирует в виде скаляра в градусах. |
Scanning & Field of view — Сканирование и поле зрения датчика
| Параметр | Описание |
|---|---|
| Report Elevation | Включите датчик, сообщающий информацию вертикального изменения в виде |
| Scan Mode | Режим сканирования датчика, выбранного как |
| Field of View (°) | Поле зрения датчика в виде двух неотрицательных скаляров, представляющих Azimuth и Elevation в градусах. |
| Mechanical scan limits (°) | Верхний и нижние пределы механического скана в виде двух скаляров для Azimuth в градусах. Если Report Elevation включен, можно задать пределы скана для Elevation в градусах. Чтобы включить этот параметр, установите Scan Mode на |
| Electronic scan limits (°) | Верхний и нижние пределы электронного скана в виде двух скаляров для Azimuth в градусах. Если Report Elevation включен, можно задать пределы скана для Elevation в градусах. Чтобы включить этот параметр, установите Scan Mode на |
| Max scan rate (°/s) | Максимальная частота развертки в виде скаляра для Azimuth в градусах в секунду. Если Report Elevation включен, можно задать максимальную частоту развертки для Elevation в градусах в секунду. Если заданная частота развертки (Частота обновления * Поле зрения) больше, чем частота развертки Max, частота развертки датчика является усеченной в частоте развертки Max. Чтобы включить этот параметр, установите Scan Mode на |
Detections Settings — Настройки обнаруженийНастройки обнаружения датчика, заданного при помощи вероятности обнаружений, ложь предупреждает уровень, диапазон ссылки и ссылочный RCS.
| Параметр | Описание |
|---|---|
| Detection Probability | Вероятность датчика, успешно обнаруживающего цель в виде скаляра в [0,1]. Это количество задает вероятность обнаружения цели с радарным поперечным сечением, больше, чем Reference RCS и в Reference Range датчика. |
| False Alarm Rate | Вероятность датчика, делающего ложное обнаружение в каждой ячейке разрешения датчика в виде скаляра в [1e-7,1e-3]. |
| Reference Range (m) | Диапазон ссылки для данного Detection Probability и данного Reference RCS в виде положительной скалярной величины в метрах. |
| Reference RCS (dBsm) | Ссылочное радарное поперечное сечение (RCS) для данного Detection Probability и данного Reference Range в виде скаляра в dBsm. |
Advanced Settings — Расширенные настройкиРасширенные настройки датчика перечислены в этой таблице.
| Параметр | Описание |
|---|---|
| Max Number of Detections | Максимальное количество обнаружений, о которых сообщает датчик в виде положительного целого числа. |
| Report False Alarm | Позвольте датчику смоделировать и сообщить о ложных предупреждениях в виде |
| Report Range Rate | Позвольте радару измерить и сообщить об уровнях целевого диапазона в виде |
| Model Target Occlusion | Включите поглощение газов объектов от расширенных объектов в виде |
| Model Range Ambiguity | Включите неоднозначности области значений в виде |
| Model Range Rate Ambiguity | Включите неоднозначности уровня области значений в виде Чтобы включить этот параметр, установите Report Range Rate на |
| Max Unambiguous Range (m) | Максимальная однозначная область значений в виде положительной скалярной величины. Максимальная однозначная область значений задает максимальную область значений, для которой радар может однозначно разрешить область значений цели. |
| Max Unambiguous Radial Speed (m/s) | Максимальная однозначная радиальная скорость в виде положительной скалярной величины. Радиальная скорость является величиной уровня целевого диапазона. Максимальная однозначная радиальная скорость задает радиальную скорость, для которой радар может однозначно разрешить уровень области значений цели. Чтобы включить этот параметр, установите Report Range Rate на |
Accuracy & Noise — Точность и шумовые настройкиТочность и шумовая установка датчика перечислены в этой таблице.
| Параметр | Описание |
|---|---|
| Azimuth (°) | Разрешение азимута и смещение в виде двух неотрицательных скаляров:
|
| Elevation (°) | Разрешение вертикального изменения и смещение в виде двух неотрицательных скаляров:
Чтобы включить этот параметр, включите Report Elevation. |
| Range (m) | Разрешение области значений и смещение в виде двух неотрицательных скаляров:
|
| Range Rate (m/s) | Разрешение уровня области значений и смещение в виде двух неотрицательных скаляров:
|
| Add noise to measurements | Добавьте шум измерения в обнаружениях в виде |
TRAJECTORY — Настройки траекторииЧтобы отредактировать траекторию и управлять генерацией траектории, используйте настройки траектории.

Нажмите Waypoints, чтобы добавить waypoints в выбранную платформу.
Нажмите Delete Trajectory, чтобы удалить существующую траекторию.
Нажмите Trajectory Table, чтобы отобразить таблицу траектории.
Нажмите Time-Altitude plot, чтобы отобразить время по сравнению с высотным графиком.
Можно также принять решение автоматически сгенерировать waypoint траекторию или вручную ввести waypoints путем изменения выборов PATH AND ORIENTATION и параметров SPEED.
| Параметр | Выбор |
|---|---|
| Trajectory Course |
|
| Platform Orientation |
|
| Time |
|
| Ground speed |
|
| Climb Rate |
|
Trajectory Table — Информация о траекторииИнформация о траектории для каждого waypoint в виде таблицы скаляров. Когда вы вставляете waypoints на холсте платформы, таблица автоматически сгенерирована. Нажмите Trajectory Table под вкладкой Trajectory, чтобы отобразить таблицу.

После того, как вы измените значения параметров в таблице, траектория платформы изменяется соответственно на холсте. Таблица включает эти параметры траектории.
| Параметр | Описание |
|---|---|
| Times (s) | Время, в которое платформа посещает waypoint в виде скаляра в секундах. |
| X (m) | x координата waypoint в системе координат навигации сценария. |
| Y (m) | y координата waypoint в системе координат навигации сценария. |
| Altitude (m) | Высота платформы waypoint в системе координат навигации сценария. |
| Course (°) | Направление движения на x-y плоскости в виде углового измерения от направления X. |
| Ground speed (m/s) | Величина спроектированной скорости на x-y плоскости в виде скаляра в метрах. |
| Climb Rate (m/s) | Скороподъемность waypoint, который является проекцией скорости платформы в z направлении. |
| Roll (°) | Угол ориентации платформы об оси X системы координат сценария, в градусах в виде скаляра. |
| Pitch (°) | Угол ориентации платформы об оси Y системы координат сценария, в градусах в виде скаляра. |
| Yaw (°) | Угол ориентации платформы об оси z системы координат сценария, в градусах в виде скаляра. |
Приложения используют систему координат NED в качестве координатной системы координат по умолчанию, в которой платформа с положительной высотой имеет отрицательную координату z.
Можно отменить (нажмите Ctrl+Z), и восстановление (нажимают Ctrl+Y) изменения вы делаете на холстах датчика и сценарии. Например, можно использовать эти горячие клавиши, чтобы удалить недавно размещенный дорожный центр или восстановить перемещение радарного датчика.
Можно использовать панель Space на клавиатуре, чтобы сбросить Холст Платформы к представлению, содержащему все платформы и траектории.
Можно использовать Enter и Esc, включает клавиатуру, чтобы принять и отменить waypoint, соответственно.
