Создайте 3-D карту заполнения
occupancyMap3D класс хранит 3-D информацию карты и карты. Карта хранится как вероятностные значения в структуре данных дерева октантов. Класс обрабатывает произвольные среды и расширяет его размер динамически на основе входных параметров наблюдения. Можно добавить наблюдения как облака точек или как определенные местоположения xyz. Эти наблюдения обновляют значения вероятности. Вероятностные значения представляют заполнение местоположений. Структура данных дерева октантов обрезает данные соответственно, чтобы остаться эффективной и в памяти и на диске.
omap = occupancyMap3D
omap = occupancyMap3D(res)Resolution свойство.
omap = occupancyMap3D(res,Name,Value)Name,Value парные аргументы. Например, 'FreeThreshold',0.25 устанавливает порог, чтобы считать ячейки без препятствий как значение вероятности 0,25. Заключите каждое имя свойства в кавычки.
checkOccupancy | Проверяйте, свободны ли местоположения или заняты |
getOccupancy | Получите вероятность заполнения местоположений |
inflate | Раздуйте карту |
insertPointCloud | Вставьте 3-D точки или наблюдение облака точек в карту |
rayIntersection | Найдите точки пересечения лучей и занятых ячеек карты |
setOccupancy | Установите вероятность заполнения местоположений |
show | Покажите карту заполнения |
updateOccupancy | Обновите вероятность заполнения в местоположениях |
occupancyMap3D препятствия объектно-ориентированной памяти в трехмерном пространстве, с помощью наблюдений датчика, чтобы сопоставить среду. Создайте карту и добавьте точки из облака точек, чтобы идентифицировать препятствия. Затем раздуйте препятствия в карте, чтобы гарантировать безопасный операционный пробел вокруг препятствий.
Создайте occupancyMap3D объект с разрешением карты 10 ячеек/метр.
map3D = occupancyMap3D(10);
Задайте набор 3-D точек как наблюдение от положения [x y z qw qx qy qz]. Это положение для датчика, который наблюдает эти точки и сосредоточен на источнике. Задайте два набора точек, чтобы вставить несколько наблюдений.
pose = [ 0 0 0 1 0 0 0]; points = repmat((0:0.25:2)', 1, 3); points2 = [(0:0.25:2)' (2:-0.25:0)' (0:0.25:2)']; maxRange = 5;
Вставьте первый набор точек с помощью insertPointCloud. Функция использует положение датчика и данные точки, чтобы вставить наблюдения в карту. Цвета отобразили коррелят к высоте точки только в иллюстративных целях.
insertPointCloud(map3D,pose,points,maxRange) show(map3D)

Вставьте второй набор точек. Луч между положением датчика (источник) и этими точками перекрывает точки от предыдущей вставки. Поэтому свободное пространство между датчиком и новыми точками обновлено и отмечено как свободное пространство.
insertPointCloud(map3D,pose,points2,maxRange) show(map3D)

Раздуйте карту, чтобы добавить буферную зону для безопасной работы вокруг препятствий. Задайте радиус транспортного средства и расстояние безопасности и используйте сумму этих значений, чтобы задать радиус инфляции для карты.
vehicleRadius = 0.2; safetyRadius = 0.3; inflationRadius = vehicleRadius + safetyRadius; inflate(map3D, inflationRadius); show(map3D)

Структура данных дерева октантов является иерархической структурой, используемой для подразделения среды в кубические объемы под названием voxels. Для данного объема карты пробел рекурсивно подразделен на восемь вокселей до достижения желаемого разрешения карты (размер вокселя) достигается. Это подразделение может быть представлено как дерево, которое хранит значения вероятности для местоположений в карте.
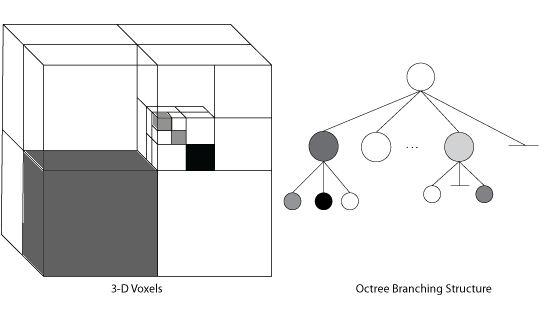
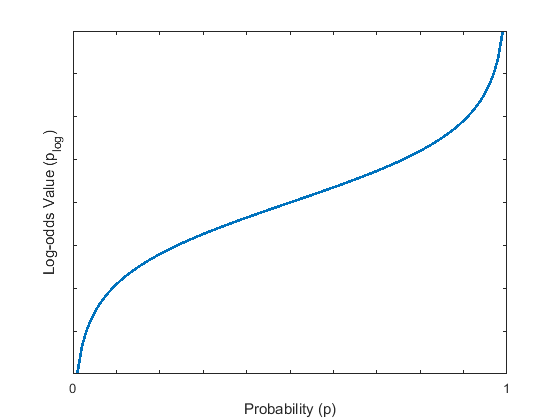
Значения вероятности в дереве имеют представление логарифмических разногласий. Используя это представление, местоположения легко восстанавливаются с динамических наблюдений, и уменьшаются числовые ошибки из-за маленьких вероятностей. Чтобы остаться эффективными в памяти, более низкие ветви дерева сокращены в структуре, если они совместно используют те же значения заполнения с помощью этого представления логарифмических разногласий.
Класс внутренне обрабатывает организацию этой структуры данных, включая сокращение ветвей. Задайте все наблюдения как пространственные координаты при использовании функций такой как setOccupancy, getOccupancy, или insertPointCloud. Вставки в дерево и навигация через дерево, определяются на основе пространственных координат и разрешения карты.
[1] Hornung, Армин, Кай М. Верм, Марен Бенневитс, Кирилль Штахнисс и Вольфрам Burgard. "OctoMap: эффективная вероятностная 3D среда отображения на основе деревьев октантов". Автономные Роботы, Издание 34, № 3, 2013, стр 189–206.. doi:10.1007/s10514-012-9321-0.
inflate | insertPointCloud | setOccupancy | show | readOccupancyMap3D (ROS Toolbox)