Элемент механической передачи с фрикционным поясом перенес окружность шкива
Simscape / Автомобильная трансмиссия / Couplings & Drives

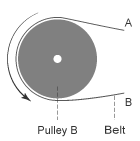
Блок Belt Pulley представляет шкив, перенесенный в гибкий идеальный, плоский, или V-образный пояс. Идеальный пояс не уменьшается относительно поверхности шкива. Шкив может опционально перевести через порт C, который необходим в блоке, и займитесь системой.
Блок составляет трение между гибким поясом и периферией шкива. Если сила трения не достаточна, чтобы управлять загрузкой, блок позволяет промах. Отношение между силами в трудных и свободных ветвях соответствует уравнению Эйлера. Блок составляет центробежную загрузку в гибком поясе, инерции шкива и подшипнике трения.
Можно выбрать относительное направление пояса движения. Два конца пояса могут переместиться в равные или противоположные направления. Блок принимает несоблюдение в поясе и пропускает потери из-за переноса пояса вокруг шкива.
Механическая передача модели уравнений блока между поясом переходит или к или от шкива. Трудные и свободные ветви используют то же вычисление. Без достаточной силы фрикционной силы недостаточно, чтобы передать степень между шкивом и поясом.
Ваша модель допустима, когда оба конца пояса находятся в силе. Можно принять решение вывести предупреждение в Средстве просмотра Simulink® Diagnostic, когда ведущий конец пояса теряет силу. При сборке модели гарантируйте, что сила обеспечена в течение симуляции. Это может быть сделано путем добавления массы в по крайней мере один из концов пояса или путем добавления механизма натяжения в модель. Используйте Переменное Средство просмотра, чтобы гарантировать, что любые пружины присоединили пояс, находятся в силе. Для получения дополнительной информации о создании механизма натяжения смотрите Лучшые практики для Моделирования Сетей Шкива.
Кинематические ограничения между шкивом и поясом:
Когда вы устанавливаете Belt type на любой V-belt или Flat belt и набор Centrifugal force к Model centrifugal force, центробежная сила:
Когда шкив может перевести, уравнение балансировки силы:
где:
β является указателем направления пояса. Когда вы устанавливаете Belt direction на Ends move in same direction, β = 1. В противном случае, β =-1.
Vrel является относительной скоростью между периферией шкива и поясом. Vrel = 0 для идеального случая шкива.
VA является ветвью линейная скорость.
VB является ветвью B линейная скорость.
VC является шкивом линейная скорость в ее центре. Если шкив не переводит, эта переменная фиксируется к 0.
ωS является скоростью вращения шкива.
R является радиусом шкива.
Fcentrifugal является поясом центробежная сила.
FC является силой, действующей через центроид шкива. Когда вы задаете значение для Inertia, FC включает силу из-за ускорения массы шкива.
ρ является поясом линейная плотность.
Ffr является силой трения между шкивом и поясом.
FA является силой, действующей вдоль ветви A.
FB является силой, действующей вдоль ветви B.
f является коэффициентом трения. Это эквивалентно параметру Contact friction coefficient.
θ является контактом, переносят угол.
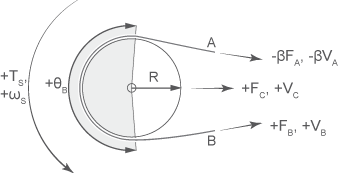
Соглашение знака таково это, когда Belt direction установлен в Ends move in opposite direction, положительное вращение в порте S имеет тенденцию давать отрицательный перевод для порта A и положительный перевод для порта B.
Для плоского пояса задайте значение f как параметр Contact friction coefficient. Для V-пояса блок вычисляет значение как
где:
f' является эффективным коэффициентом трения для V-пояса.
Φ является V-пояс sheave угол.
Коэффициент трения является функцией относительной скорости, таким образом что
где
μ является мгновенным значением коэффициента трения.
f является установившимся значением коэффициента трения.
Vthr является скоростным порогом трения.
Скоростной порог трения управляет шириной области, в которой коэффициент трения изменяет свое значение от нуля до установившегося максимума. Скоростной порог трения задает скорость, при которой гиперболическая касательная равняется 0.999. Чем меньший значение, тем более крутой изменение μ.
Блок определяет эффект трения на силе в концах пояса как:
который следует за формой формулы Эителвейна для трения пояса. Крутящий момент, действующий на шкив:
где:
σ = 1, когда вы устанавливаете Belt type на Ideal - No slip. В противном случае,
TS является крутящим моментом шкива.
b является переносящим вязким затуханием.
Fthr является порогом силы.
Блок пропускает податливость вдоль пояса.
Оба конца пояса обеспечивают соответствующую силу в течение симуляции.
Блок обрабатывает перевод центра шкива как плоский, где перемещения шкива вдоль того, чтобы делить пополам шкива переносят угол. Центральная скорость VC и сила FC только составляет компонент вдоль этой линии движения.
Уравнение Eytelwein для трения пояса пропускает эффект перевода шкива на трении.


