Этот пример готовых узлов представляет полную модель динамики аппарата проходить тормозящий тест, включая тест разделения-mu. Можно создать собственные версии, устанавливание среды, чтобы протестировать то транспортное средство соответствует конструктивным требованиям при нормальных и экстремальных условиях движения. Используйте этот пример готовых узлов в поездке и обрабатывающих исследованиях, и шасси управляет разработкой, чтобы охарактеризовать динамику аппарата во время тормозящего теста. Для получения информации об этом и подобных маневрах, см. стандарты SAE J299_2009014 и ISO 21994:20075.
Чтобы протестировать продвинутые системы помощи водителю (ADAS) и восприятие автоматизированного управления (AD), планирование и программное обеспечение управления, можно запустить маневр в 3D среде. Для 3D требований платформы механизма визуализации и рекомендаций по аппаратным средствам, смотрите 3D Требования Engine Визуализации и Ограничения.
Чтобы создать и открыть рабочую копию постоянного примера готовых узлов радиуса, войти
Эта таблица суммирует блоки и подсистемы в примере готовых узлов. Некоторые подсистемы содержат варианты.
| Элемент примера готовых узлов | Описание | Варианты |
|---|---|---|
Прямо выведите ссылочный генератор | Генерирует команды акселератора и тормоза, чтобы провести маневр прямой линии. Ускорение начинается на заданном уровне, пока транспортное средство не достигает продольного скоростного заданного значения. Контроллер транспортного средства обеспечивает продольное скоростное заданное значение в течение требуемого времени или расстояния. Контроллер затем замедляет транспортное средство. Опционально, задайте условия отказа прежде, чем тормозить во время теста разделения-mu. Если скорость транспортного средства, регулируя угол или уровень рыскания не в допустимой области значений, прежде чем торможение, блок установит условие отказа. Значения по умолчанию представляют податливость ISO 145126. | ✓ |
Команды драйвера | Реализует модель драйвера что использование примера готовых узлов, чтобы сгенерировать ускорение, торможение, механизм и регулирование команд. По умолчанию вариантом подсистемы Driver Commands является блок Predictive Driver. | ✓ |
Среда | Ветер реализаций и дорожные силы, включая константу или содействующий масштабный коэффициент трения разделения. | ✓ |
Контроллеры | Контроллеры реализаций для блоков управления двигателем (ЭКЮ), передачи, антиблокировочные тормозные системы (ABS) и активные дифференциалы. | ✓ |
Пассажирское транспортное средство | Реализует:
| ✓ |
Визуализация | Обеспечивает траекторию транспортного средства, ответ драйвера и 3D визуализацию. Чтобы включить 3D визуализацию, установите параметры блоков 3D Engine параметр 3D Engine на Enabled. Для минимальных 3D требований к аппаратным средствам среды визуализации смотрите 3D Требования Engine Визуализации и Ограничения. | ✓ |
Чтобы заменить вариант по умолчанию, на вкладке Modeling, в разделе Design, кликают по выпадающему. В разделе General выберите Variant Manager. В Различном менеджере перейдите к варианту, который вы хотите использовать. Щелкните правой кнопкой и выберите Override using this Choice.
Блок Straight Maneuver Reference Generator генерирует команды акселератора и тормоза, чтобы провести маневр прямой линии. Ускорение начинается на заданном уровне, пока транспортное средство не достигает продольного скоростного заданного значения. Контроллер транспортного средства обеспечивает продольное скоростное заданное значение в течение требуемого времени или расстояния. Контроллер затем замедляет транспортное средство.
Используйте Maneuver Parameters, чтобы задать время начала маневра, скоростное заданное значение, ускорение и замедление.
Опционально, на вкладке Tracking Parameters, выберите Enable fault tracking before braking. Используйте параметры, чтобы задать условия отказа прежде, чем тормозить во время теста разделения-mu. Если скорость транспортного средства, регулируя угол или уровень рыскания не в допустимой области значений, прежде чем торможение, блок установит условие отказа. Значения по умолчанию представляют податливость ISO 145126.
Для получения дополнительной информации смотрите Straight Maneuver Reference Generator.
Блок Driver Commands реализует модель драйвера что использование примера готовых узлов, чтобы сгенерировать ускорение, торможение, механизм и регулирование команд. По умолчанию, если вы выбираете параметры блоков Reference Generator Use maneuver-specific driver, initial position, and scene, пример готовых узлов выбирает драйвер для маневра, который вы задали.
Установка командного режима транспортного средства | Реализация |
|---|---|
| Блок Longitudinal Driver — Продольный отслеживающий скорость контроллер. На основе ссылки и скоростей обратной связи, блок генерирует нормированное ускорение и тормозящие команды, которые могут варьироваться от 0 до 1. Используйте блок, чтобы смоделировать динамический ответ драйвера или сгенерировать команды, необходимые, чтобы отследить продольный цикл диска. |
| Блок Predictive Driver — Контроллер, который генерирует нормированное регулирование, ускорение и торможение команд, чтобы отследить продольную скорость и боковое ссылочное смещение. Нормированные команды могут варьироваться между-1 к 1. Диспетчер использует однодорожечное (велосипед) модель для оптимального управления предварительным просмотром одно точки. |
| Реализует систему разомкнутого контура так, чтобы можно было сконфигурировать пример готовых узлов для постоянного или основанного на сигнале регулирования, ускорения, торможения и ввода команд механизма. |
Подсистема Среды реализует ветер и дорожные силы, включая константу или содействующий масштабный коэффициент трения разделения.
Используйте блок Road Track Friction параметр Type of surface, чтобы задать содействующий масштабный коэффициент трения:
Constant friction coefficient scaling factor — Постоянное поверхностное трение во время маневра
Split friction coefficient scaling factor — Два коэффициента трения
Выберите эту опцию, чтобы задать масштабные коэффициенты трения для теста торможения разделения-mu. Используйте активированные параметры, чтобы установить наземное трение и прямоугольные поверхностные содействующие масштабные коэффициенты трения.
Для получения дополнительной информации смотрите Road Track Friction.
Пример готовых узлов имеет эти наземные варианты обратной связи.
| Среда | Вариант | Описание |
|---|---|---|
Оснуйте обратную связь |
| Блок Vehicle Terrain Sensor использования, чтобы реализовать трассировку лучей в 3D среде. |
| Реализует константу или содействующий масштабный коэффициент трения разделения на основе блока Road Track Friction выход. |
Подсистема Контроллеров генерирует крутящий момент механизма, механизм передачи, тормозное давление и команды дифференциального давления.
Контроллер ECU генерирует команду крутящего момента механизма. Контроллер предотвращает сверхгазование на механизме путем ограничения команды крутящего момента механизма значением, заданным переменной EngRevLim рабочего пространства модели. По умолчанию значение составляет 7 000 об/мин. Если дифференциальная команда крутящего момента превышает ограниченную команду крутящего момента механизма, ECU устанавливает команду крутящего момента механизма на дифференциальный крутящий момент, которым управляют.
Подсистема контроллера Передачи генерирует команду механизма передачи. Контроллер включает эти варианты.
| Вариант | Описание |
|---|---|
| Реализует управляющий модуль передачи (TCM), который использует логику Stateflow®, чтобы сгенерировать команду механизма на основе ускорения транспортного средства, скорости колеса и скорости вращения двигателя. |
| Управление передачей разомкнутого контура. Контроллер устанавливает команду механизма на запрос механизма. |
| Реализует управляющий модуль передачи (TCM), который использует логику Stateflow, чтобы сгенерировать команду механизма на основе ускорения транспортного средства, команду тормоза, скорость колеса, скорость вращения двигателя и запрос механизма. |
| Реализует контроллер весла, который использует ускорение транспортного средства и скорость вращения двигателя, чтобы сгенерировать команду механизма. |
Подсистема контроллера Тормоза реализует подсистему Управления Тормозным давлением, чтобы сгенерировать команду тормозного давления. Подсистема Управления Тормозным давлением имеет эти варианты.
| Вариант | Описание |
|---|---|
| Реализует контроллер обратной связи ABS, который переключается между двумя состояниями, чтобы отрегулировать промах колеса. Управление скорострельного оружия минимизирует ошибку между фактическим промахом и желаемым промахом. Для желаемого промаха диспетчер использует значение промаха, в котором кривая mu-промаха достигает пикового значения. Это желаемое значение промаха оптимально для минимального тормозного пути. |
| Управление тормозом разомкнутого контура. Контроллер устанавливает команду тормозного давления на ссылочное тормозное давление на основе команды тормоза. |
| Управление ABS с пятью состояниями, когда вы симулируете маневр 1,2,3 контроллер ABS с пятью состояниями, использует переключение логики на основе замедления колеса и ускорения транспортного средства, чтобы управлять тормозным давлением в каждом колесе. Рассмотрите использование управления ABS с пятью состояниями, чтобы предотвратить тупик колеса, тормозной путь уменьшения, или обеспечить устойчивость рыскания во время маневра. Параметры ABS по умолчанию приняты за работу на дорогах, которые имеют также:
Чтобы задать дорожное покрытие, смотрите Среду. |
Активная Дифференциальная подсистема Управления генерирует команду дифференциального давления. Чтобы вычислить команду, подсистема имеет эти варианты.
| Вариант | Описание |
|---|---|
| Реализует контроллер, который генерирует команду дифференциального давления на основе:
|
| Не реализует контроллер. Устанавливает команду дифференциального давления на 0. |
Пассажирская подсистема Транспортного средства имеет механизм, контроллеры и кузов с четырьмя колесами. А именно, транспортное средство содержит эти подсистемы.
| Тело, приостановка, подсистема колес | Вариант | Описание |
|---|---|---|
PassVeh7DOF |
| Транспортное средство с четырьмя колесами:
|
PassVeh14DOF |
| Транспортное средство с четырьмя колесами.
|
| Подсистемы двигателей | Вариант | Описание |
|---|---|---|
Сопоставленный Engine |
| Сопоставленный двигатель с искровым зажиганием |
Регулирование, передача, автомобильная трансмиссия и подсистема тормозов | Вариант | Описание | |
|---|---|---|---|
Идеал автомобильной трансмиссии фиксированный механизм | Модель Driveline | All Wheel Drive | Сконфигурируйте автомобильную трансмиссию для с приводом на все колеса, с передними ведущими колесами, заднего колеса или заднего колеса активный дифференциальный диск и задайте тип связи крутящего момента. |
| |||
| |||
| |||
Передача |
| Реализует зафиксированную передачу механизма идеала. | |
Тормозите гидравлику | Нет данных | Реализует эвристический ответ гидравлической системы, когда контроллер применяет команду тормоза к цилиндру. Включает передние и задние коэффициенты смещения колеса. Подсистема преобразует поданное давление в цилиндрическое положение золотника. Чтобы сгенерировать тормозное давление, золотник применяет поток в нисходящем направлении к цилиндрам. | |
Когда вы запускаете симуляцию, подсистема Визуализации обеспечивает драйвер, транспортное средство и информацию об ответе. Пример готовых узлов регистрирует сигналы транспортного средства во время маневра, включая регулирование, транспортное средство и скорость вращения двигателя и поперечное ускорение. Можно использовать Инспектора Данных моделирования, чтобы импортировать регистрируемые сигналы и исследовать данные.
| Элемент | Описание |
|---|---|
Команды драйвера | Команды драйвера:
|
Ответ транспортного средства | Ответ транспортного средства:
|
Держитесь, Скорость, блок Lat Accel Scope |
|
Транспортное средство плоттер XY | Транспортное средство, продольное по сравнению с боковым расстоянием |
Блок ISO 15037-1:2006 | Отобразите сигналы измерения стандарта ISO в Инспекторе Данных моделирования, включая угол руля и крутящий момент, продольный и поперечная скорость и угол заноса |
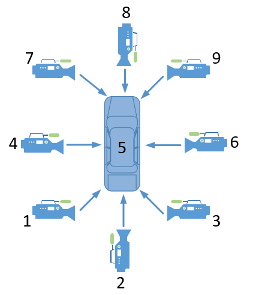
Если вы включаете 3D визуализацию на вкладке 3D Engine блока Reference Generator путем выбора Enabled, можно просмотреть ответ транспортного средства в AutoVrtlEnv окно.
Чтобы гладко изменить поля зрения камеры, используйте эти ключевые команды.
| Ключ | Поле зрения камеры | |
|---|---|---|
1 | Назад оставленный |
|
2 | Назад | |
3 | Обратное право | |
4 | Левый | |
5 | Внутренний | |
6 | Право | |
7 | Передняя сторона оставлена | |
8 | Передняя сторона | |
9 | Переднее право | |
0 | Наверху | |
Для дополнительного управления камерой используйте эти ключевые команды.
| Ключ | Управление камерой |
|---|---|
| Вкладка | Циклически повторите представление между всеми транспортными средствами в сцене. |
Колесико прокрутки мыши | Управляйте расстоянием камеры от транспортного средства. |
L | Переключите эффект задержки камеры на или прочь. Когда вы включаете эффект задержки, поле зрения камеры включает:
Эта задержка включает улучшенную визуализацию полного ускорения транспортного средства и вращение. |
| F | Переключите свободный режим камеры на или прочь. Когда вы включаете свободный режим камеры, можно использовать мышь, чтобы изменить тангаж и рыскание камеры. Этот режим позволяет вам вращаться вокруг камеры вокруг транспортного средства. |
[1] Pasillas-Lépine, Уильям. "Гибридное моделирование и предельный анализ цикла для класса пятифазовых антиблокировочных алгоритмов тормоза". Системная Динамика транспортного средства 44, № 2 (2006): 173-188.
[2] Джерард, Мэтью, Уильям Пэзиллас-Лепайн, Эдвин Де Ври и Мишель Верхэеджен. "Улучшения пятифазового алгоритма ABS для экспериментальной валидации". Системная Динамика транспортного средства 50, № 10 (2012): 1585-1611.
[3] Bosch, R. "Bosch Автомобильное Руководство". 10-й редактор Варрендэйл, PA: SAE International, 2018.
[4] J299_200901. Процедура тестирования тормозного пути. Варрендэйл, PA: SAE International, 2009.
[5] ISO 21994:2007. Легковые автомобили — Тормозной путь при прямолинейном торможении с ABS — метод тестирования Разомкнутого контура. Женева: ISO, 2007.
[6] ISO 14512:1999. Легковые автомобили — Прямо вперед тормозящий на поверхностях с коэффициентом разделения трения - процедура тестирования Разомкнутого контура. Женева: ISO, 2007.
3D Engine | Road Track Friction | Straight Maneuver Reference Generator