Примечание
В последнем разделе этого исследования требуется программное обеспечение Simulink 3D Animation.
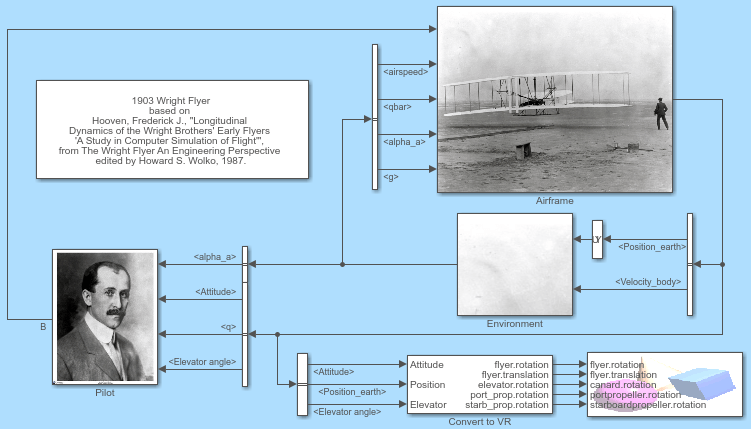
В данном тематическом исследовании описывается модель Урайта Флаера 1903 года. Построенный Орвиллом и Уилбуром Райтом, «Райт Флайер» поднялся в небо в декабре 1903 года и открыл век управляемого полёта. Летающая машина братьев Райт достигла следующих целей:
Оставил землю под собственной властью
Двигался вперед и поддерживал свою скорость
Приземление на отметке не ниже места начала
Эта модель основана на более ранней модели [1], которая исследовала продольную устойчивость Wright Flyer и, следовательно, моделировала только движение вперед и по вертикали вместе с углом наклона. Райт Флайер столкнулся с многочисленными инженерными проблемами, включая динамическую и статическую нестабильность. С боков Flyer имел тенденцию опрокидываться в поперечных ветрах и порывах, а в продольном направлении его угол наклона волнообразно отклонялся [2].
В этих условиях модель воссоздает продольную динамику полёта, которую испытали бы пилоты «Райт Флайера». Поскольку они смогли контролировать боковое движение, Орвилл и Уилбур Райт смогли сохранить относительно прямую траекторию полёта.
Следует отметить, что при выполнении этой модели в окне команд MATLAB ® генерируются информационные сообщения, а в средстве просмотра диагностики - предупреждающие сообщения об утверждении. Это происходит потому, что модель иллюстрирует использование блока Assertion, чтобы показать, что листовка ударяется о землю при посадке.
Откройте модель Wright Flyer, введя aeroblk_wf_3dof в командной строке MATLAB.
Подсистема «Планер» моделирует динамику жесткого тела планера «Райт Флайер», включая угол атаки лифта, аэродинамические коэффициенты, силы и моменты, а также уравнения движения с тремя степенями свободы.
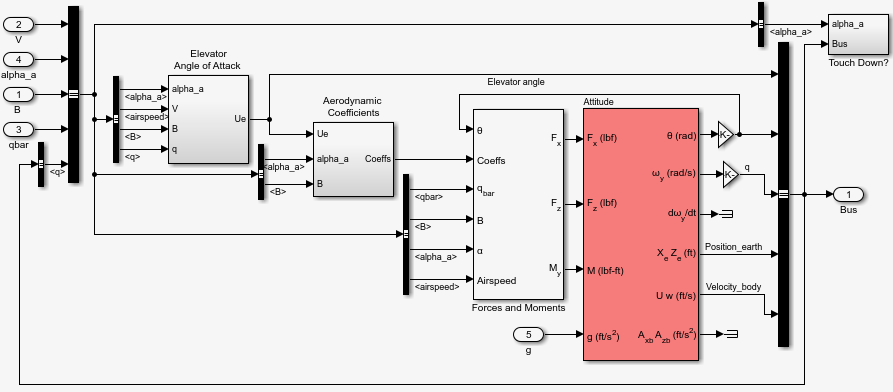
Подсистема планера состоит из следующих частей:
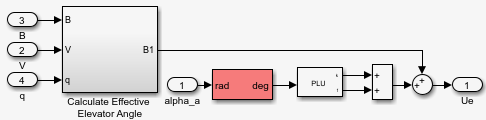
Подсистема «Угол атаки лифта» вычисляет эффективный угол наклона лифта для планера Wright Flyer и подает его в подсистему пилота.
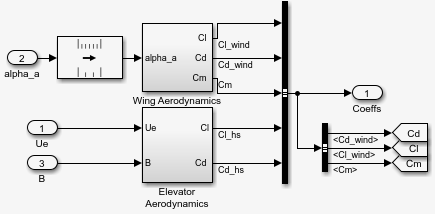
Подсистема «Аэродинамические коэффициенты» содержит аэродинамические данные и уравнения для вычисления аэродинамических коэффициентов, которые суммируются и передаются в подсистему «Силы и моменты». Хранящиеся в наборах данных аэродинамические коэффициенты определяются интерполяцией с использованием блоков Прелукапа.
Аэродинамические силы и моменты, действующие на корпус самолета, формируются из аэродинамических коэффициентов. Подсистема Силы и моменты вычисляет силы тела и моменты тела, действующие на планер вокруг центра тяжести. Эти силы и моменты зависят от аэродинамических коэффициентов, тяги, динамического давления и эталонных параметров планера.
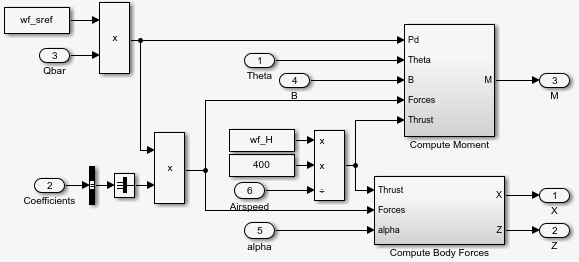
Блок 3DOF (Body Axes) использует уравнения движения для определения линейного и углового движения планера Wright Flyer. Он также выполняет преобразования из системы осей исходной модели и осей тела.
3DOF (Оси тела) Параметры блока

Первый и последний полёты «Райт Флайер» произошли 17 декабря 1903 года. Орвилл и Уилбур Райт выбрали район рядом с Китти Хок, Северная Каролина, расположенный недалеко от атлантического побережья. В тот день были зафиксированы порывы ветра более 25 миль в час. После последнего полёта в тот бурный декабрьский день порыв ветра поймал и опрокинул «Райт Флайер», повредив его без ремонта.
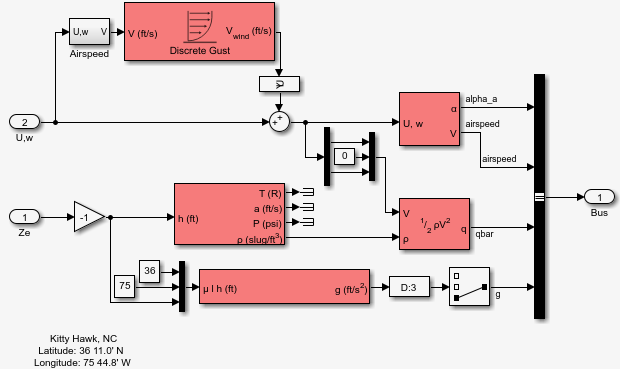
Подсистема Environment модели Wright Flyer содержит множество блоков из библиотеки Environment программного обеспечения Aerospace Blockset™, включая ветер, атмосферу и гравитацию, и вычисляет воздушную скорость и динамическое давление. Блок дискретной модели порыва ветра обеспечивает порывы ветра в моделируемую среду. Остальные блоки:
Блок «Заболеваемость и скорость полета» вычисляет угол атаки и скорость полета.
Блок модели атмосферы COESA вычисляет плотность воздуха.
Блок динамического давления вычисляет динамическое давление на основе плотности и скорости воздуха.
Блок Модели Силы тяжести WGS84 производит силу тяжести в широте Летчика Мастера, долготе и высоте.
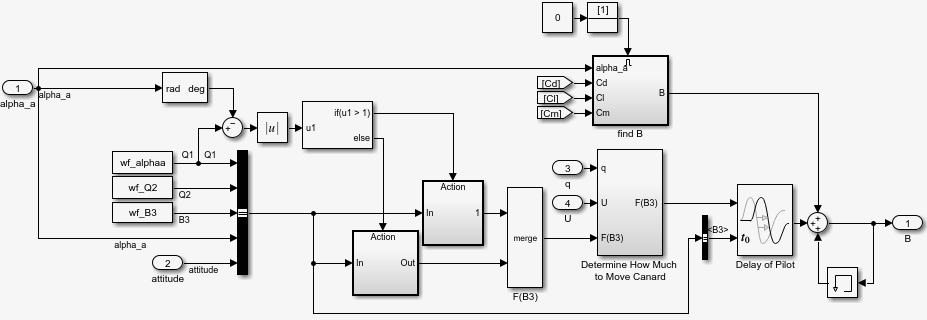
Подсистема Пилот управляет самолетом, реагируя как на угол тангажа (положение), так и на угол атаки. Если угол атаки отличается от заданного угла атаки более чем на один градус, подсистема «Пилот» реагирует коррекцией угла подъема (крена). Когда угловая скорость превышает +/- 0,02 рад/с, угловая скорость и угловое ускорение также учитываются с дополнительными коррекциями к углу подъема.
Время реакции пилотов во многом определило успех полетов [1]. Без автоматического контроллера время реакции 0,06 секунды является оптимальным для успешного полёта. Блок задержки пилот-сигнала (переменной задержки передачи) воссоздает этот эффект, создавая задержку не более 0,08 секунды.
Значения по умолчанию для этого моделирования позволяют модели Wright Flyer успешно взлетать и приземляться. Время реакции пилота (wf_B3) установлено на 0,06 секунды, нужный угол атаки (wf_alphaa) является постоянной, а достигаемая высота низкой. Модель Wright Flyer реагирует аналогично фактической модели Wright Flyer. Он покидает землю, движется вперед и приземляется на такую же высоту, как та, с которой начинался. Эта модель демонстрирует продольную волнистость в положении исходного самолета.
Объем положения (измеряется в радианах)
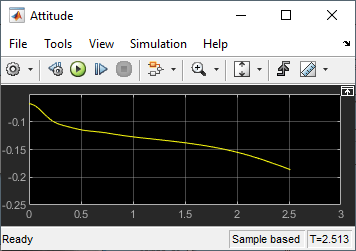
Пилот с быстрым временем реакции и идеальными условиями полета позволяет успешно летать на Wright Flyer. Модель Райта Флайера подтверждает, что контроль его продольного движения был серьезной проблемой. Самый длинный зарегистрированный полёт в тот день длился всего 59 секунд и преодолел 852 фута.
Примечание
Для этого раздела требуется Simulink 3D Animation.
Модель Wright Flyer также обеспечивает визуализацию виртуального мира, закодированную на языке моделирования виртуальной реальности (VRML) [3]. Блок VR Sink (Simulink 3D Animation) в главной модели позволяет просматривать движение полета в трех измерениях.
1903 Мир виртуальной реальности Райт Флаер
[1] Ховен, Фредерик Дж., «Продольная динамика ранних листовок братьев Райт: исследование компьютерного моделирования полета», из «The Wright Flyer: An Engineering Perspective», ред. Говард С. Волко, Smithsonian Institution Press, 1987.
[2] Кулик, Ф.Э.К. и Х.Р. Jex, «Аэродинамика, стабильность и управление листовкой Райта 1903 года», из «The Wright Flyer: An Engineering Perspective», ред. Говард С. Волко, Smithsonian Institute Press, 1987.
[3] Thaddeus Beier создал начальную модель Wright Flyer в формате Inventor, а Тимоти Рохали преобразовал ее в VRML.
