В Simulink ® можно моделировать обмен данными между клиентом и сервером AUTOSAR для моделирования и генерации кода. Сведения об используемых блоках Simulink и высокоуровневом рабочем процессе см. в разделе Интерфейс клиент-сервер.
Для моделирования серверов и клиентов AUTOSAR можно выполнить одно или оба из следующих действий.
Импорт серверов и клиентов AUTOSAR из кода ARXML в модель.
Настройте серверы и клиенты AUTOSAR из блоков Simulink.
В этом разделе приведены примеры конфигурации сервера и клиента AUTOSAR, которые начинаются с блоков Simulink.
В этом примере показано, как настроить функциональный блок Simulink в качестве сервера AUTOSAR. Пример использования этих файлов в папке matlabroot/help/toolbox/autosar/examplescd в папку):
При копировании файлов в рабочую папку поместите файл MATLAB ® в файл модели.
Откройте модель, в которой требуется создать и настроить сервер AUTOSAR, или откройте пример модели. mControllerWithInterface_server.slx.
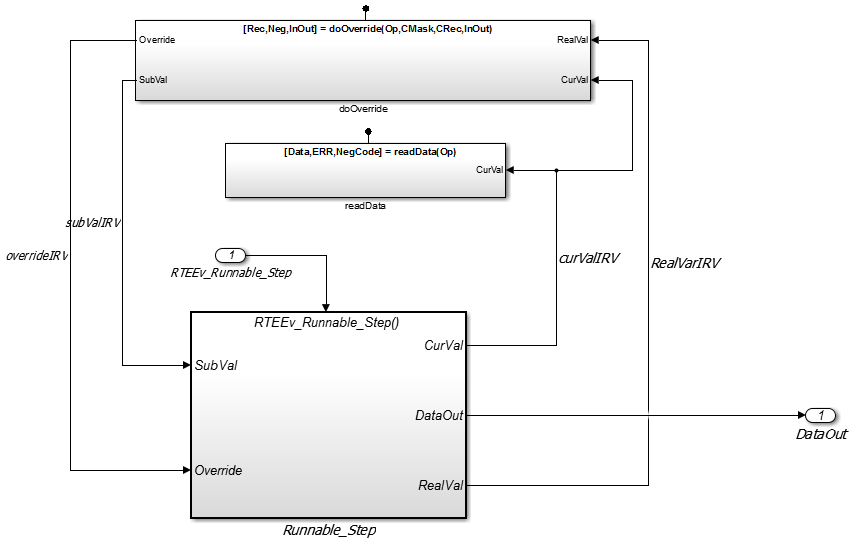
Добавьте в модель функциональный блок Simulink. В примере модели предусмотрено два функциональных блока Simulink, doOverride и readData.
Сконфигурируйте блок Simulink Function для реализации функции сервера. Настройте прототип функции и реализуйте алгоритм функции сервера.
В примере модели содержимое блока Simulink Function с именем readData реализовать функцию сервера с именем readData.
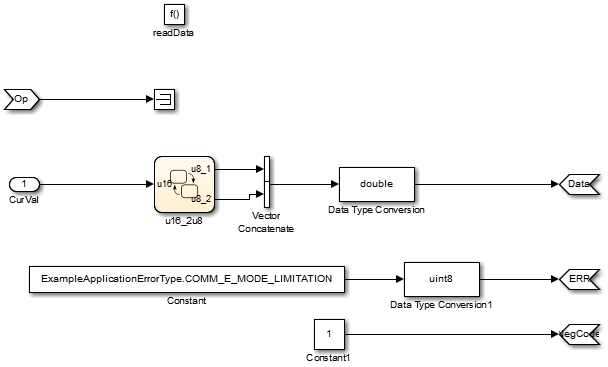
Содержание включает в себя:
Триггерный блок readData, представляющий порт триггера для функции сервера. В свойствах блока Триггер для параметра Тип триггера установлено значение function-call. Также выбрана опция Обработать как функцию Simulink.
Блок ввода аргументов Op и блоки исходящего аргумента Data, ERR, и NegCode, соответствующий прототипу функции [Data,ERR,NegCode]=readData(Op).
Примечание
При настройке аргументов функции сервера необходимо указать тип данных сигнала, размеры порта и тип сигнала на вкладке Атрибуты сигнала блоков ввода и вывода. Конфигурация AUTOSAR не проходит проверку, если атрибуты сигнала отсутствуют для аргументов функции сервера.
Блоки, реализующие readData алгоритм функции. В этом примере несколько простых блоков обеспечивают Data, ERR, и NegCode выходные значения с минимальной манипуляцией. Блок Constant представляет значение ошибки приложения, определенной для функции сервера. Значение Op передаваемый вызывающей стороной игнорируется. В реальном приложении алгоритм может выполнять более сложную манипуляцию, например, выбирая путь выполнения на основе переданного значения Opсоздание выходных данных, требуемых приложением, и проверка состояния ошибок.
Когда функция сервера работает в Simulink, настройте блок функции Simulink в модели, настроенной для AUTOSAR. Например, настройте текущую модель для AUTOSAR или скопируйте блок в модель AUTOSAR.
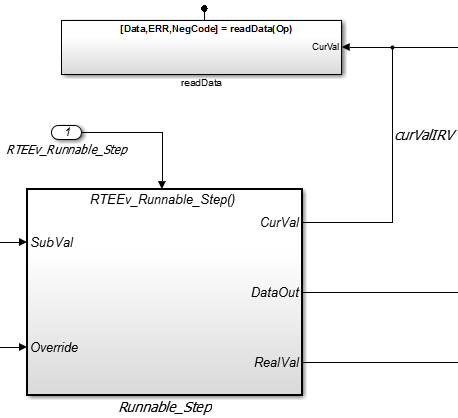
Примером модели является модель AUTOSAR, в которой блок Simulink Function readData был скопирован. Вместо значимого Op входное значение для readData функция, линия передачи данных Simulink CurVal предоставляет входное значение, которое используется в алгоритме функции.
Необходимыми элементами для настройки сервера AUTOSAR в общем порядке их создания являются:
Интерфейс клиент-сервер (C-S) AUTOSAR
Одна или несколько операций AUTOSAR, для которых интерфейс C-S обрабатывает запросы клиентов
Порт сервера AUTOSAR для получения клиентских запросов на операцию сервера
Для каждой операции сервера сервер AUTOSAR может выполнять запросы клиента
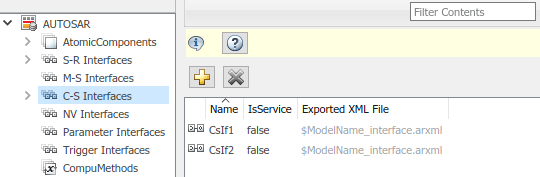
Откройте словарь AUTOSAR. Для просмотра интерфейсов AUTOSAR C-S в модели перейдите к ракурсу C-S Interfaces. Пример модели уже содержит интерфейсы клиент-сервер.
Если интерфейс C-S еще не существует в модели, создайте его.
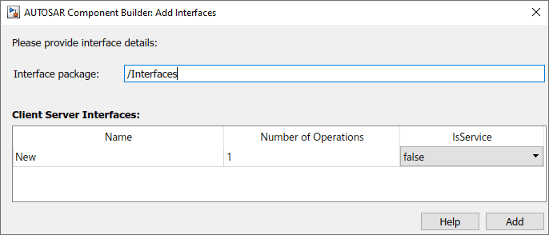
В представлении интерфейсов C-S нажмите кнопку Add. ![]() Это действие открывает диалоговое окно Добавить интерфейсы (Add Interfaces).
Это действие открывает диалоговое окно Добавить интерфейсы (Add Interfaces).
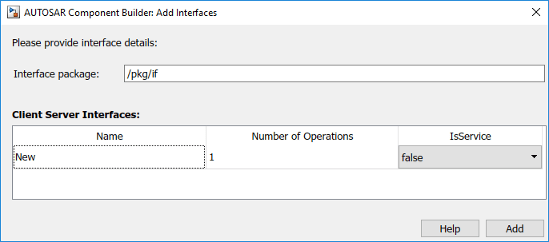
В диалоговом окне присвойте имя новому интерфейсу C-S и укажите количество операций, которые требуется связать с интерфейсом. Оставьте другие параметры по умолчанию. Нажмите кнопку Add. Новый интерфейс появится в представлении интерфейсов C-S.
В разделе Интерфейсы C-S создайте одну или несколько операций сервера AUTOSAR, для которых интерфейс C-S обрабатывает запросы клиента. Каждая операция соответствует функции сервера Simulink в модели.
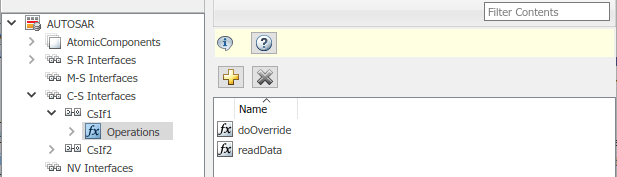
Разверните узел Интерфейсы C-S и разверните отдельный интерфейс C-S, к которому требуется добавить операцию сервера. (В примере модели разверните CsIf1.) Чтобы просмотреть операции для интерфейса, выберите Операции. Пример модели уже содержит операции сервера AUTOSAR с именем doOverride и readData.
Если операция сервера еще не существует в модели, создайте ее. (Если интерфейс C-S содержит операцию-заполнитель с именем Operation1, вы можете безопасно удалить его.)
В представлении операций нажмите кнопку Добавить. ![]() Это действие открывает диалоговое окно Добавить операцию (Add Operation).
Это действие открывает диалоговое окно Добавить операцию (Add Operation).
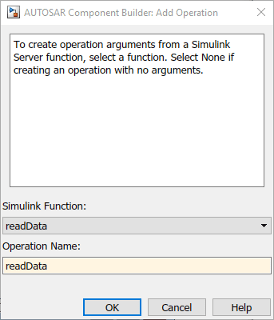
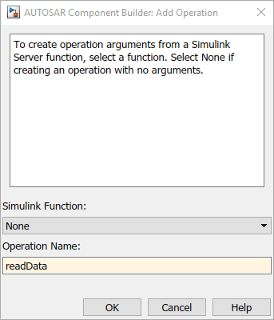
В диалоговом окне введите имя операции. Укажите имя соответствующей функции сервера Simulink.
Если соответствующая серверная функция Simulink имеет аргументы, выберите функцию в списке Simulink Function. Это действие приводит к автоматическому созданию аргументов операции AUTOSAR на основе аргументов функции сервера Simulink. Нажмите кнопку ОК. Операция и ее аргументы отображаются в представлении операций.
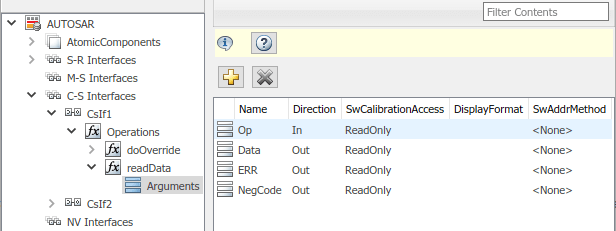
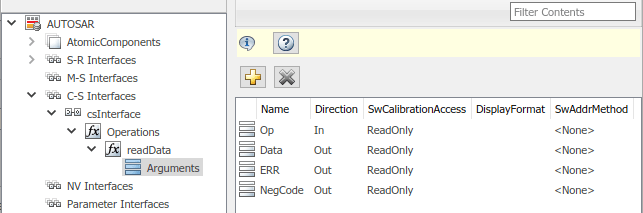
Проверьте аргументы, перечисленные для операции сервера AUTOSAR. Разверните «Операции», разверните отдельную операцию (например, readData) и выберите «Аргументы». Перечисленные аргументы соответствуют прототипу серверной функции Simulink.
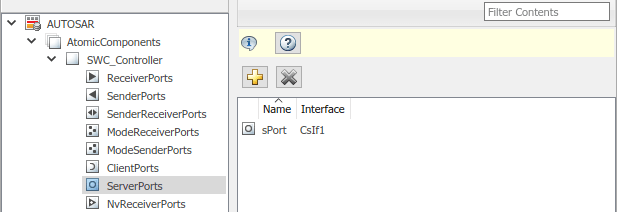
Для просмотра серверных портов AUTOSAR в модели перейдите к представлению серверных портов. Разверните узел AtomicComponents, разверните настраиваемый компонент и выберите пункт Сервер (Server) Порты (Ports). Пример модели уже содержит порт сервера AUTOSAR с именем sPort.
Если порт сервера еще не существует в модели, создайте его.
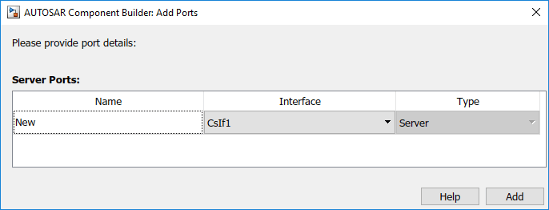
В представлении серверных портов нажмите кнопку Add. ![]() Это действие открывает диалоговое окно Добавить порты (Add Ports).
Это действие открывает диалоговое окно Добавить порты (Add Ports).
В диалоговом окне присвойте имя новому порту сервера и выберите интерфейс C-S, для которого была настроена операция сервера. Нажмите кнопку Add. Новый порт появится в представлении серверных портов.
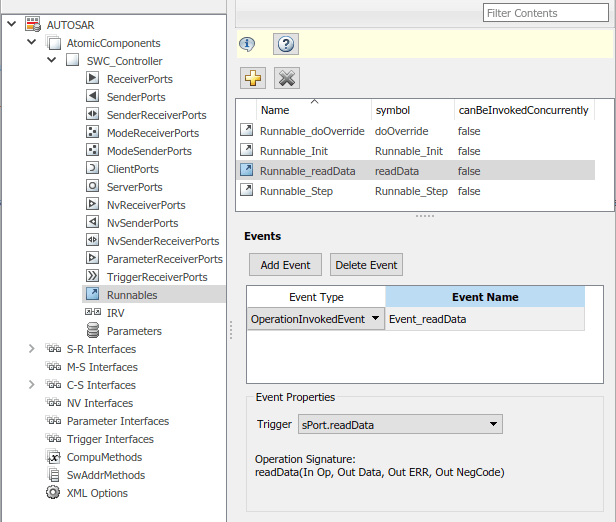
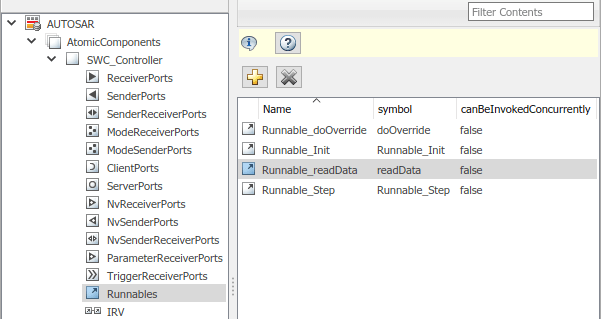
Для каждой операции сервера AUTOSAR настройте сервер AUTOSAR, выполняемый для выполнения клиентских запросов. Чтобы просмотреть исполняемые объекты AUTOSAR в модели, выберите Выполняемые объекты (Runnables). Пример модели уже содержит сервер, который можно запустить для readData, имя Runnable_readData.
Если подходящий сервер еще не существует в модели, создайте его.
В представлении runnables нажмите кнопку Add. ![]() Это действие добавляет запись таблицы для новой выполняемой.
Это действие добавляет запись таблицы для новой выполняемой.
Выберите новую возможность выполнения и настройте ее имя и символ. Имя символа, указанное для выполняемой функции, должно соответствовать имени функции сервера Simulink. (В примере модели имя символа для Runnable_readData - имя функции readData.)
Создайте событие, вызываемое операцией, чтобы запустить запускаемый сервер. (Пример модели определяет событие event_readData для выполняемого сервера Runnable_readData.)
В разделе События щелкните Добавить событие. Выберите новое событие.
Для параметра «Тип события» выберите OperationInvokedEvent.
Введите имя события.
В разделе Свойства события выберите значение триггера, соответствующее порту сервера и операции C-S, ранее созданной для функции сервера. (В примере модели значение Триггер выбрано для Runnable_readData является sPort.readData, объединение серверного порта sPort с работой readData.) Нажмите кнопку «Применить».
На этом шаге завершается настройка сервера AUTOSAR в представлении конфигурации AUTOSAR Dictionary.
Переключитесь в режим редактора сопоставлений кодов конфигурации и сопоставьте функцию сервера Simulink с сервером AUTOSAR, который можно запустить.
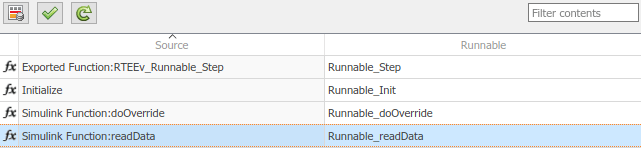
Откройте редактор сопоставлений кода. Выберите вкладку Функции.
Выберите функцию сервера Simulink. Чтобы сопоставить функцию с исполняемой функцией AUTOSAR, щелкните по полю Выполняемая функция и выберите соответствующую выполняемую функцию из списка доступных запускаемых серверов. В примерной модели функция Simulink readData сопоставлен с возможностью выполнения AUTOSAR Runnable_readData.
Для проверки конфигурации компонента AUTOSAR нажмите кнопку Validate. ![]() Если сообщается об ошибках, исправьте их и повторите проверку. Повторяйте до успешного завершения проверки.
Если сообщается об ошибках, исправьте их и повторите проверку. Повторяйте до успешного завершения проверки.
Создайте код C и ARXML для модели.
После настройки сервера AUTOSAR настройте соответствующий вызов клиента AUTOSAR, как описано в разделе Настройка клиента AUTOSAR.
После настройки сервера AUTOSAR, как описано в разделе Настройка сервера AUTOSAR, настройте соответствующий вызов клиента AUTOSAR. В этом примере показано, как настроить блок вызывающего абонента функции как вызов клиента AUTOSAR. В примере используется файл matlabroot/help/toolbox/autosar/examples/mControllerWithInterface_client.slx
Откройте модель, в которой требуется создать и настроить клиент AUTOSAR, или откройте пример модели. mControllerWithInterface_client.slx.
Добавьте в модель блок вызывающей функции. В примере модели предусмотрен блок функции Simulink с именем readData, который расположен внутри Runnable3_Subsystem.
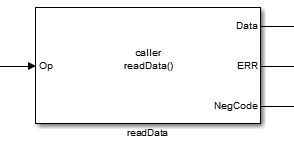
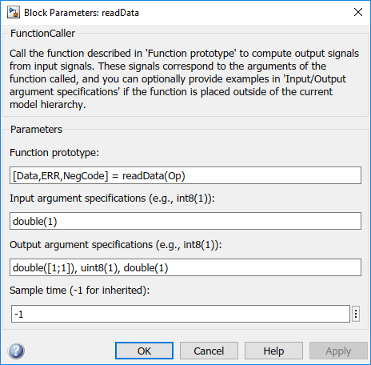
Сконфигурируйте блок вызова функции для вызова соответствующего блока функции Simulink. Дважды щелкните блок, чтобы открыть его, и отредактируйте параметры блока, чтобы указать прототип функции сервера.
В примерной модели readData Параметры вызывающего абонента функции определяют прототип функции для readData функция сервера, используемая в примере сервера AUTOSAR, Настройка сервера AUTOSAR. Вот readData из примера сервера.
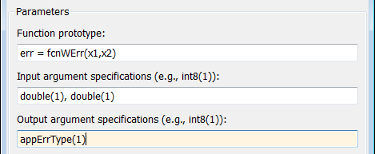
Параметры вызывающей функции включают в себя поля прототипа функции и спецификации аргумента. Имя функции в прототипе должно соответствовать имени операции, указанному для соответствующей операции сервера. См. шаг создания операции в разделе Настройка сервера AUTOSAR. Типы аргументов и измерения также должны соответствовать аргументам функции сервера.
Примечание
Если необходимо смоделировать вызов функции в этот момент, следует поместить блок вызывающей функции в общую модель или тестовый жгут с соответствующим блоком функции Simulink. Для этого примера моделирование не требуется.
Когда вызов функции полностью сформирован в Simulink, настройте блок вызова функции в модели, настроенной для AUTOSAR. Например, настройте текущую модель для AUTOSAR или скопируйте блок в модель AUTOSAR.
Совет
При создании (или копировании) блока вызывающей функции в модели перед отображением и конфигурированием компонента AUTOSAR имеется возможность заполнения программным обеспечением аргументов операции AUTOSAR вместо создания аргументов вручную. Чтобы создать аргументы вместе с полностью сконфигурированным клиентским портом AUTOSAR и полностью сопоставленной вызывающей функцией Simulink, используйте быстрый запуск компонента AUTOSAR для создания компонента по умолчанию. Дополнительные сведения см. в разделе Создание программного компонента AUTOSAR в Simulink.
Примером модели является модель AUTOSAR, в которой блок «Вызывающая функция» readData был скопирован. Блок подключается к входам, выходам и сигнальным линиям, соответствующим типам данных и измерениям аргументов функции.

Примечание
При каждом добавлении или изменении блока вызывающего абонента функции в модели AUTOSAR обновите вызывающих абонентов функции в конфигурации AUTOSAR. Откройте редактор сопоставлений кода. В диалоговом окне нажмите кнопку «Обновить». ![]() Это действие загружает или обновляет передачу данных Simulink, вызывающие функции и числовые типы в модели. После обновления добавленный вызывающий абонент функции появляется на вкладке «Вызывающие абоненты функции» редактора сопоставлений кодов.
Это действие загружает или обновляет передачу данных Simulink, вызывающие функции и числовые типы в модели. После обновления добавленный вызывающий абонент функции появляется на вкладке «Вызывающие абоненты функции» редактора сопоставлений кодов.
Необходимыми элементами для настройки клиента AUTOSAR в общем порядке их создания являются:
Интерфейс клиент-сервер (C-S) AUTOSAR
Одна или несколько операций AUTOSAR, соответствующих функциям сервера Simulink, определенным в модели сервера AUTOSAR
Порт клиента AUTOSAR для приема запросов клиента на операцию сервера, предлагаемую интерфейсом C-S
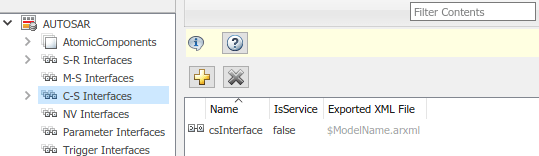
Откройте словарь AUTOSAR. Для просмотра интерфейсов AUTOSAR C-S в модели перейдите к ракурсу C-S Interfaces. Пример модели уже содержит интерфейс клиент-сервер с именем csInterface.
Если интерфейс C-S еще не существует в конфигурации AUTOSAR, создайте его.
В представлении интерфейсов C-S нажмите кнопку Add. ![]() Это действие открывает диалоговое окно Добавить интерфейсы (Add Interfaces).
Это действие открывает диалоговое окно Добавить интерфейсы (Add Interfaces).
В диалоговом окне присвойте имя новому интерфейсу C-S и укажите количество операций, которые требуется связать с интерфейсом. Оставьте другие параметры по умолчанию. Нажмите кнопку Add. Новый интерфейс появится в представлении интерфейсов C-S.
В разделе Интерфейсы C-S создайте одну или несколько операций AUTOSAR, соответствующих функциям сервера Simulink, определенным в модели сервера AUTOSAR.
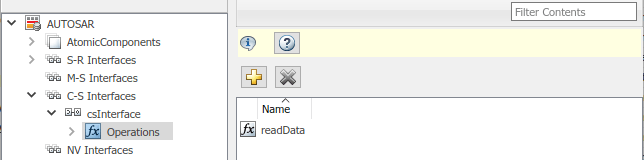
Раскройте узел Интерфейсы C-S и разверните отдельный интерфейс C-S, к которому требуется добавить операцию AUTOSAR. (В примере модели разверните CsInterface.) Чтобы просмотреть операции для интерфейса, выберите Операции. Пример модели уже содержит операцию AUTOSAR с именем readData.
Если операция AUTOSAR еще не существует в модели, создайте ее. (Если интерфейс C-S содержит операцию-заполнитель с именем Operation1, вы можете безопасно удалить его.)
В представлении операций нажмите кнопку Добавить. ![]() Это действие открывает диалоговое окно Добавить операцию (Add Operation).
Это действие открывает диалоговое окно Добавить операцию (Add Operation).
В диалоговом окне введите имя операции. Укажите имя соответствующей функции сервера Simulink. Оставить для функции Simulink значение None, поскольку клиентская модель не содержит функционального блока сервера Simulink. Нажмите кнопку ОК. Новая операция появится в представлении операций.
Добавьте аргументы операции AUTOSAR.
Разверните «Операции», разверните отдельную операцию (например, readData) и выберите «Аргументы».
В представлении аргументов нажмите кнопку Добавить![]() один раз для каждого аргумента функции. Например, для
один раз для каждого аргумента функции. Например, для readDataнажмите кнопку «Добавить» четыре раза для поиска аргументов Op, Data, ERR, и NegCode. Каждый щелчок создает одну новую запись аргумента.
Выберите каждую запись аргумента и задайте параметры Name и Direction в соответствии с прототипом функции.
Для просмотра портов клиента AUTOSAR в модели перейдите к представлению портов клиента. Раскройте узел AtomicComponents, разверните настраиваемый компонент и выберите пункт «Порты». Пример модели уже содержит клиентский порт AUTOSAR с именем cPort.
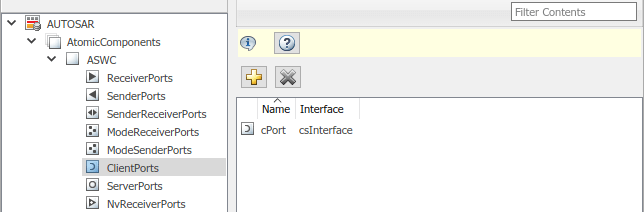
Если порт клиента еще не существует в модели, создайте его.
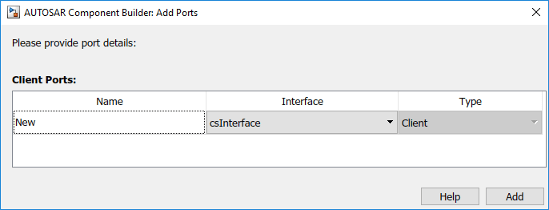
В ракурсе портов клиента нажмите кнопку Add. ![]() Это действие открывает диалоговое окно Добавить порты (Add Ports).
Это действие открывает диалоговое окно Добавить порты (Add Ports).
В диалоговом окне присвойте имя новому порту клиента и выберите интерфейс C-S. Нажмите кнопку Add. Новый порт появится в представлении клиентских портов.
На этом шаге завершается настройка клиента AUTOSAR в представлении конфигурации AUTOSAR Dictionary.
Переключитесь в режим редактора сопоставлений кодов конфигурации и сопоставьте вызывающего абонента функции Simulink с клиентским портом AUTOSAR и операцией C-S.
Откройте редактор сопоставлений кода. Выберите закладку Function Callers.
Выберите вызывающего абонента функции Simulink. Щелкните по полю ClirePort и выберите порт из списка доступных клиентских портов AUTOSAR. Щелкните по полю Operation и выберите операцию из списка доступных операций AUTOSAR C-S. В примере модели вызывающая сторона функции Simulink readData сопоставлен с клиентским портом AUTOSAR cPort и работа C-S readData.

Для проверки конфигурации компонента AUTOSAR нажмите кнопку Validate. ![]() Если сообщается об ошибках, исправьте их и повторите проверку. Повторяйте до успешного завершения проверки.
Если сообщается об ошибках, исправьте их и повторите проверку. Повторяйте до успешного завершения проверки.
Создайте код C и ARXML для модели.
AUTOSAR определяет механизм состояния ошибки приложения для обработки ошибок клиент-сервер. Сервер AUTOSAR возвращает состояние ошибки со значением, соответствующим предопределенной возможной ошибке. Клиент AUTOSAR получает состояние ошибки и отвечает на него. Программный компонент AUTOSAR, который следует инструкциям по обработке ошибок между клиентом и сервером, потенциально обеспечивает состояние ошибок для базового программного обеспечения AUTOSAR, такого как Diagnostic Event Manager (DEM).
В Simulink можно:
Импорт кода ARXML, реализующего обработку ошибок клиент-сервер.
Настройка обработки ошибок для интерфейса клиент-сервер.
Создание кода C и ARXML для обработки ошибок клиент-сервер.
При импорте кода ARXML, реализующего обработку ошибок клиент-сервер, импортер создает порты состояния ошибок в соответствующих местоположениях точки вызова сервера (блок вызова функции).
Для реализации обработки ошибок клиента-сервера AUTOSAR в Simulink:
Определите возможные значения состояния ошибки, возвращаемые сервером AUTOSAR в типе данных Simulink. Определите один или несколько кодов ошибок в диапазоне от 0 до 63 включительно. Базовое хранилище типа данных должно быть беззнаковым 8-разрядным целым числом. Объем данных должен быть Exported. Например, определите тип перечисления appErrType:
classdef(Enumeration) appErrType < uint8
enumeration
SUCCESS(0)
ERROR(1)
COMM_MODE_LIMITATION(2)
OVERFLOW(3)
UNDERFLOW(4)
VALUE_MOD3(5)
end
methods (Static = true)
function descr = getDescription()
descr = 'Definition of application error type.';
end
function hdrFile = getHeaderFile()
hdrFile = '';
end
function retVal = addClassNameToEnumNames()
retVal = false;
end
function dataScope = getDataScope()
dataScope = 'Exported';
end
end
endПримечание
Тип данных Simulink, определенный для представления возможных ошибок в модели, не влияет непосредственно на возможные ошибки AUTOSAR, которые импортируются и экспортируются в коде ARXML. Чтобы изменить экспортированные возможные ошибки для интерфейса C-S или операции C-S, используйте функции свойств AUTOSAR. В этом разделе приведены примеры.
Определите выходной аргумент состояния ошибки для блока функции Simulink, моделирующего сервер AUTOSAR. Настройте аргумент состояния ошибки как единственный вывод функции или добавьте его к другим выводам. Например, вот блок Simulink Function, который возвращает значение состояния ошибки в выходных данных. err.
Блок Simulink Function реализует алгоритм возврата состояния ошибки.
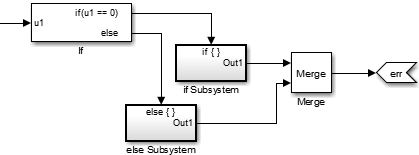
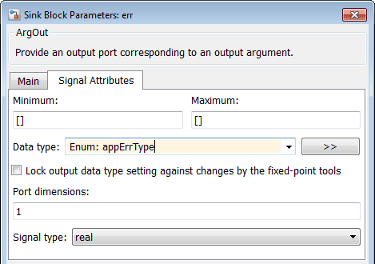
Ссылка на тип возможных значений ошибок в модели. В параметрах блока Argument Outport для аутпорта ошибки укажите тип данных состояния ошибки, в данном случае: appErrType. Задайте для размеров порта значение 1, а для типа сигнала - значение real.
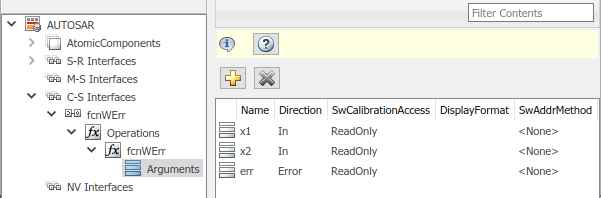
Настройте свойства AUTOSAR аргумента ошибки в интерфейсе клиент-сервер. Откройте словарь AUTOSAR, разверните интерфейс C-S и перейдите к представлению Arguments операции AUTOSAR. Чтобы добавить аргумент, нажмите кнопку Добавить. ![]() Настройте имя аргумента и задайте для параметра Direction значение
Настройте имя аргумента и задайте для параметра Direction значение Error.
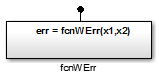
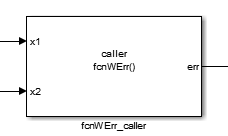
Создайте порт ошибки в каждом блоке вызывающего абонента функции, который моделирует вызов клиента AUTOSAR. Например, вот блок вызывающего абонента функции, который моделирует вызов fcnWErr.
В параметрах блока Function Caller укажите тот же тип данных состояния ошибки.
Настройте свойства AUTOSAR аргумента ошибки в соответствии с информацией в словаре AUTOSAR, представление «Аргументы», показанное на шаге 4.
Сгенерированный код C для функции отражает сконфигурированную сигнатуру функции и логику, определенную в модели для обработки возможных ошибок.
appErrType fcnWErr(real_T x1, real_T x2)
{
appErrType rty_err_0;
if (...) == 0.0) {
rty_err_0 = ...;
} else {
rty_err_0 = ...;
}
return rty_err_0;
}Кроме того, для определения класса типа перечисления, используемого в этом примере, построение генерирует файл заголовка appErrType.h, содержащий возможные определения типов ошибок.
Экспортированный код ARXML содержит возможные определения ошибок и ссылки на них.
<POSSIBLE-ERRORS>
<APPLICATION-ERROR …>
<SHORT-NAME>SUCCESS</SHORT-NAME>
<ERROR-CODE>0</ERROR-CODE>
</APPLICATION-ERROR>
<APPLICATION-ERROR …>
<SHORT-NAME>ERROR</SHORT-NAME>
<ERROR-CODE>1</ERROR-CODE>
</APPLICATION-ERROR>
…
<APPLICATION-ERROR …>
<SHORT-NAME>UNDERFLOW</SHORT-NAME>
<ERROR-CODE>4</ERROR-CODE>
</APPLICATION-ERROR>
<APPLICATION-ERROR …>
<SHORT-NAME>VALUE_MOD3</SHORT-NAME>
<ERROR-CODE>5</ERROR-CODE>
</APPLICATION-ERROR>
</POSSIBLE-ERRORS>Функции свойств AUTOSAR можно использовать для программного изменения возможных ошибок, экспортируемых в коде ARXML, и для установки для свойства Direction аргумента операции C-S значения Error.
Следующий пример добавляет UNDERFLOW и VALUE_MOD3 к возможным ошибкам для интерфейса C-S с именем fcnWErr.
>> arProps = autosar.api.getAUTOSARProperties(bdroot)
>> get(arProps,'fcnWErr','PossibleError')
ans =
'fcnWErr/SUCCESS' 'fcnWErr/ERROR' 'fcnWErr/COMM_MODE…'
'fcnWErr/OVERFLOW'
>> get(arProps,'fcnWErr/OVERFLOW','errorCode')
ans =
3
>> add(arProps,'fcnWErr','PossibleError','UNDERFLOW')
>> set(arProps,'fcnWErr/UNDERFLOW','errorCode',4)
>> add(arProps,'fcnWErr','PossibleError','VALUE_MOD3')
>> set(arProps,'fcnWErr/VALUE_MOD3','errorCode',5)
>> get(arProps,'fcnWErr','PossibleError')
ans =
'fcnWErr/SUCCESS' 'fcnWErr/ERROR' 'fcnWErr/COMM_MODE…'
'fcnWErr/OVERFLOW' 'fcnWErr/UNDERFLOW' 'fcnWErr/VALUE_MOD3'Также можно получить доступ к возможным ошибкам в операции C-S. В следующем примере перечислены возможные ошибки для операции fcnWErr на интерфейсе C-S fcnWErr.
>> arProps = autosar.api.getAUTOSARProperties(bdroot)
>> get(arProps,'fcnWErr/fcnWErr','PossibleError')
ans =
'fcnWErr/SUCCESS' 'fcnWErr/ERROR' 'fcnWErr/COMM_MODE…'
'fcnWErr/OVERFLOW'В следующем примере задается направление аргумента операции C-S err кому Error.
>> arProps = autosar.api.getAUTOSARProperties(bdroot)
>> set(arProps,'fcnWErr/fcnWErr/err','Direction','Error')
>> get(arProps,'fcnWErr/fcnWErr/err','Direction')
ans =
ErrorСледующие блоки и шаблоны моделирования несовместимы с параллельным выполнением выполняемого сервера AUTOSAR.
Блоки внутри функции Simulink:
Блоки с состоянием, например «Единичная задержка».
Блоки с логикой пересечения нулей, такие как триггерная подсистема и включенная подсистема.
Диаграммы Stateflow ®.
Другие функциональные блоки Simulink.
Неинлинированные подсистемы.
Вызов унаследованной функции C с побочными эффектами.
Моделирование шаблонов внутри функции Simulink:
Запись в память хранилища данных (например, на экземпляр памяти).
Запись в глобальный блочный сигнал (например, в статическую память).
Для применения ограничений параллелизма к выполняемым серверам AUTOSAR используйте свойство runnable canBeInvokedConcurrently. Свойство находится в представлении Runnables словаря AUTOSAR.
Когда canBeInvokedConcurrently имеет значение true для выполняемого сервера проверка AUTOSAR проверяет наличие блоков и шаблонов моделирования, несовместимых с параллельным выполнением выполняемого сервера. Если функция Simulink содержит несовместимый блок или шаблон моделирования, проверка сообщает об ошибках. Если canBeInvokedConcurrently имеет значение false, проверка не проверяет блоки и шаблоны моделирования, несовместимые с параллельным выполнением выполняемого сервера.
Можно задать свойство canBeInvokedConcurrently кому true только для сервера AUTOSAR, запускаемого с помощью OperationInvokedEvent. Выполнение с другими триггерами событий, такими как события синхронизации, не может быть вызвано одновременно. Если canBeInvokedConcurrently имеет значение true для не выполняемого сервера проверка AUTOSAR завершается неуспешно.
Программная установка свойства runnable canBeInvokedConcurrently, используйте функцию свойства AUTOSAR set. В следующем примере задается свойство runnable canBeInvokedConcurrently кому true для сервера AUTOSAR с именем Runnable_readData.
addpath(fullfile(matlabroot,'/help/toolbox/autosar/examples')); open_system('mControllerWithInterface_server') arProps = autosar.api.getAUTOSARProperties('mControllerWithInterface_server'); SRPath = find(arProps,[],'Runnable','Name','Runnable_readData')
SRPath =
1×1 cell array
{'SWC_Controller/ControllerWithInterface_ar/Runnable_readData'}invConc = get(arProps,'SWC_Controller/ControllerWithInterface_ar/Runnable_readData',... 'canBeInvokedConcurrently')
invConc = logical 0
set(arProps,'SWC_Controller/ControllerWithInterface_ar/Runnable_readData',... 'canBeInvokedConcurrently',true) invConc = get(arProps,'SWC_Controller/ControllerWithInterface_ar/Runnable_readData',... 'canBeInvokedConcurrently')
invConc = logical 1
Для программной настройки свойств AUTOSAR интерфейсов клиент-сервер AUTOSAR используйте функции свойств AUTOSAR, такие как set и get.
Для программной настройки данных сопоставления Simulink с AUTOSAR для клиентов и серверов AUTOSAR используйте следующие функции:
Например, сценарии, использующие свойства AUTOSAR и функции сопоставления, см. в разделе Настройка интерфейсов клиент-сервер AUTOSAR.
Ввод аргументов | Вывод аргумента | Вызывающий абонент функции | Функция симулятора | Спусковой механизм
