Схема Боде представляет собой интерактивный графический способ модификации компенсатора для достижения специфического отклика разомкнутого цикла (формирования цикла). Чтобы интерактивно сформировать отклик с разомкнутым контуром с помощью конструктора систем управления, используйте редактор бодов. В редакторе можно настроить полосу пропускания и конструкцию с разомкнутым контуром в соответствии со спецификациями коэффициента усиления и запаса по фазе.
Чтобы настроить форму контура, можно добавить полюса и нули в компенсатор и скорректировать их значения непосредственно в редакторе модов или использовать редактор компенсаторов. Дополнительные сведения см. в разделе Правка компенсатора Dynamics.
Сведения обо всех методах настройки, доступных в конструкторе систем управления, см. в разделе Методы настройки конструктора систем управления.
В этом примере показано, как сконструировать компенсатор для двигателя постоянного тока с использованием методов графической настройки диаграммы Боде.
Модель установки и требования
Передаточная функция двигательной установки постоянного тока, как описано в SISO Пример: Двигатель постоянного тока, является:
+ 40,02
В этом примере требования к конструкции:
Время нарастания менее 0,5 секунды
Погрешность установившегося состояния менее 5%
Перерасход менее 10%
Запас усиления более 20 дБ
Запас по фазе больше 40 градусов
Конструктор открытых систем управления
В командной строке MATLAB ® создайте модель передаточной функции завода и откройте конструктор систем управления в конфигурации редактора бодов.
G = tf(1.5,[1 14 40.02]);
controlSystemDesigner('bode',G);Приложение открывается и импортируется G в качестве модели установки для архитектуры управления по умолчанию, Конфигурация 1.
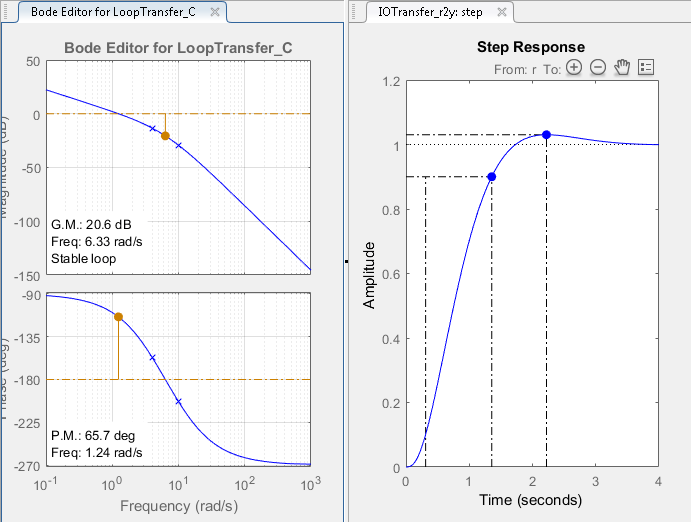
В приложении открываются следующие графики ответов:
Редактор модов с разомкнутым контуром для LoopTransfer_C ответ. Этот ответ является функцией GC передачи с разомкнутым контуром, где C - компенсатор, а G - установка.
Ответ на шаг для IOTransfer_r2y ответ. Этот отклик является передаточной функцией «вход-выход» для всей системы с замкнутым контуром.
Совет
Чтобы открыть редактор модов с разомкнутым контуром, когда конструктор систем управления уже открыт, на вкладке Система управления в раскрывающемся списке Методы настройки выберите Редактор модов. В диалоговом окне «Выбор ответа для редактирования» выберите существующий ответ для печати или создайте New Open-Loop Response.
Для одновременного просмотра частотной характеристики с разомкнутым контуром и ступенчатой характеристики с замкнутым контуром щелкните и перетащите графики в нужное место.
Приложение отображает графики редактора модов и пошагового ответа бок о бок.
Настройка пропускной способности
Поскольку конструкция требует времени нарастания менее 0,5 секунды, установите частоту перехода постоянного тока с разомкнутым контуром около 3 рад/с. Для аппроксимации первого порядка эта частота пересечения соответствует постоянной времени 0,33 секунды.
Для облегчения просмотра кроссовера включите сетку графика. Щелкните правой кнопкой мыши в области печати Редактора объектов и выберите «Сетка». Приложение добавляет сетку к графикам ответа Боде.
Для регулировки частоты перехода увеличить коэффициент усиления компенсатора. На графике редактора модов на графике откликов величины перетащите отклик вверх. Это увеличивает коэффициент усиления компенсатора.
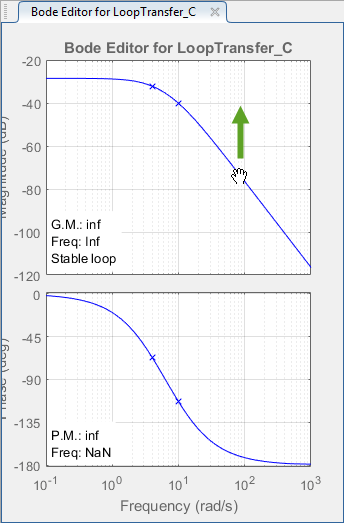
При перетаскивании графика величины приложение вычисляет коэффициент усиления компенсатора и обновляет графики отклика.
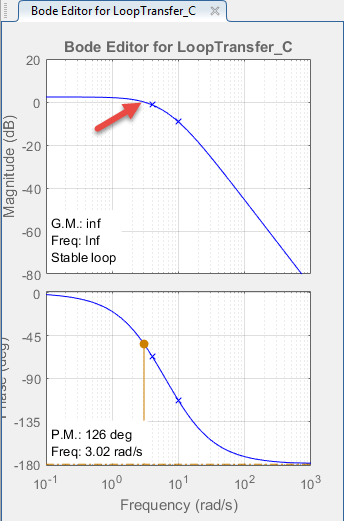
Перетащите амплитудный отклик вверх до тех пор, пока частота пересечения не составит около 3 рад/с.
Просмотр характеристик ответа на шаг
Чтобы добавить время подъема к графику «Ответ шага», щелкните правой кнопкой мыши область графика и выберите «Характеристики» > «Время подъема».
Для просмотра времени подъема наведите курсор на индикатор времени подъема.
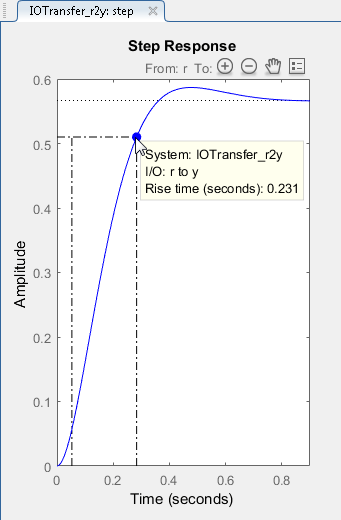
Время подъема составляет около 0,23 секунды, что удовлетворяет проектным требованиям.
Аналогично, чтобы добавить пиковый отклик к графику «Ответ шага», щелкните правой кнопкой мыши область графика и выберите «Характеристики» > «Пиковый отклик».
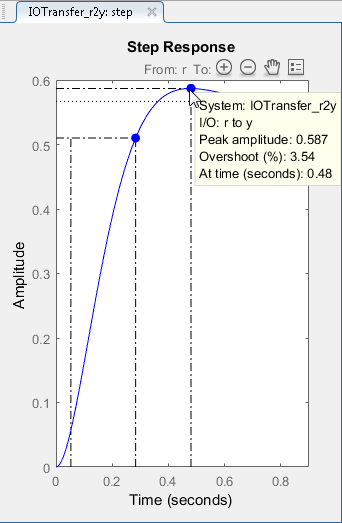
Пиковое превышение составляет около 3,5%.
Добавить интегратор в компенсатор
Чтобы выполнить требование 5% к статической ошибке, устраните статическую ошибку из реакции на шаг с замкнутым контуром, добавив интегратор к компенсатору. В редакторе модов щелкните правой кнопкой мыши в области печати и выберите «Добавить полюс/нуль» > «Интегратор».
Добавление интегратора приводит к нулевой стационарной ошибке. Однако изменение динамики компенсатора также меняет частоту кроссовера, увеличивая время подъема. Чтобы сократить время подъема, увеличьте частоту кроссовера примерно до 3 рад/с.
Регулировка коэффициента усиления компенсатора
Для возврата частоты кроссовера примерно в 3 рад/с увеличьте коэффициент усиления компенсатора. Щелкните правой кнопкой мыши в области печати Редактора модов и выберите «Редактировать компенсатор».
В диалоговом окне «Редактор компенсаторов» в разделе «Компенсатор» задайте коэффициент усиления 99и нажмите Enter.
Графики ответов обновляются автоматически.
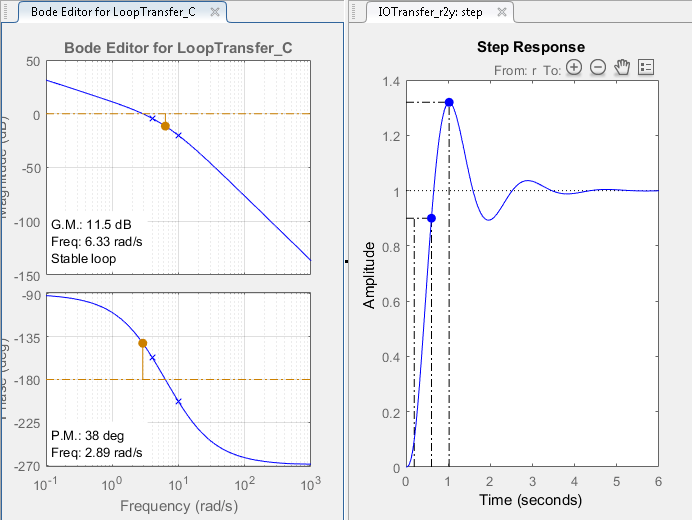
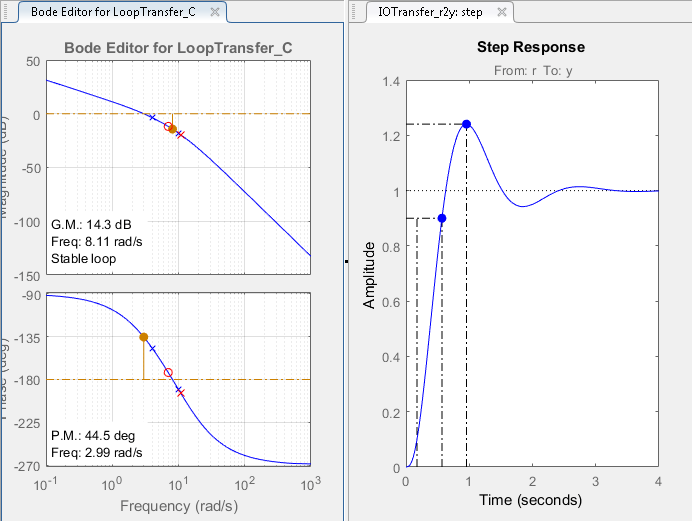
Время подъема составляет около 0,4 секунды, что удовлетворяет проектным требованиям. Однако пиковое превышение составляет около 32%. Компенсатор, состоящий из коэффициента усиления и интегратора, недостаточен для соответствия проектным требованиям. Поэтому компенсатор требует дополнительной динамики.
Добавить сеть свинца в компенсатор
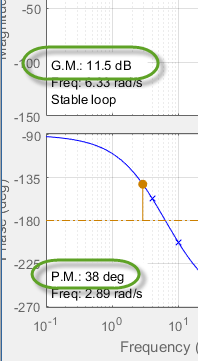
В редакторе Боде просмотрите запас усиления и запас фазы для текущей конструкции компенсатора. Конструкция требует запаса усиления более 20 дБ и запаса фазы более 40 градусов. Текущая конструкция не соответствует ни одному из этих требований.
Для увеличения запаса устойчивости добавьте свинцовую сеть к компенсатору.
В редакторе модов щелкните правой кнопкой мыши и выберите «Добавить полюс/нуль» > «Вывод».
Чтобы указать местоположение ведущего полюса сети, щелкните отклик величины. Приложение добавляет настоящий столб (красный X) и вещественный ноль (красный O) на компенсатор и на график редактора модов.
В редакторе объектов перетащите полюс и ноль, чтобы изменить их расположение. При перетаскивании приложение обновляет значения полюса/нуля и обновляет графики ответа.
Чтобы уменьшить величину полюса или нуля, перетащите его влево. Так как полюс и ноль находятся на отрицательной вещественной оси, перетаскивание их влево перемещает их ближе к началу координат в комплексной плоскости.
Совет
При перетаскивании полюса или нуля приложение отображает новое значение в строке состояния с правой стороны.
В качестве начальной оценки перетащите ноль в положение вокруг -7 и полюс в положение вокруг -11.
Запас по фазе соответствует проектным требованиям; однако запас усиления все еще слишком низок.
Редактировать полюс и нуль свинцовой сети
Для повышения производительности контроллера настройте параметры ведущей сети.
В диалоговом окне Редактор компенсаторов в разделе Dynamics щелкните строку Интерес.
В разделе Править выбранную динамику в текстовом поле Вещественный ноль укажите расположение -4.3, и нажмите Enter. Это значение находится вблизи самого медленного (крайнего левого) полюса моторной установки постоянного тока.
В текстовом поле «Реальный полюс» укажите значение -28и нажмите Enter.
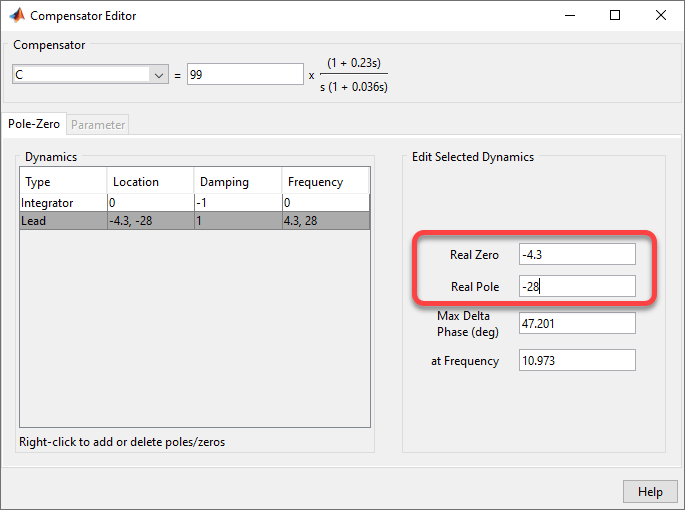
При изменении параметров сети интереса автоматически обновляются графики Компенсатор (Compensator) и Ответ (Response).
В приложении в Bode Editor запас усиления составляет 20.5 просто соответствует проектным требованиям.
Чтобы повысить надежность системы, в диалоговом окне Редактор компенсаторов уменьшите коэффициент усиления компенсатора до 84.5и нажмите Enter. Запас усиления увеличивается до 21.8и обновляются графики ответа.
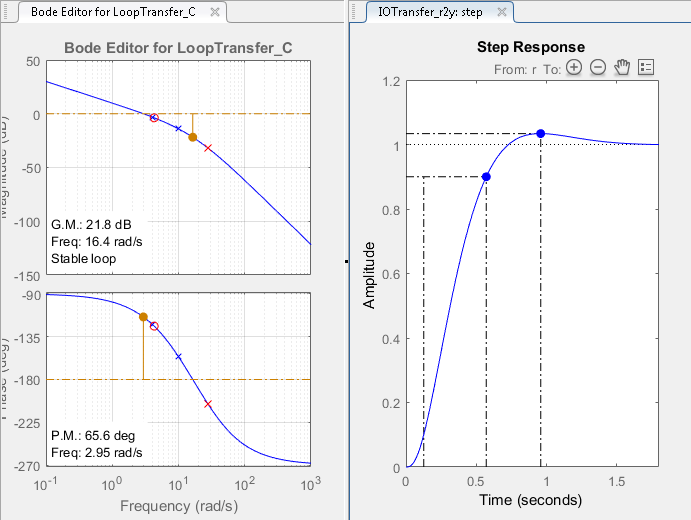
В конструкторе систем управления на графиках ответов сравните производительность системы с проектными требованиями. Рабочие характеристики системы:
Время подъема составляет 0,445 секунды.
Ошибка установившегося состояния равна нулю.
Перерасход составляет 3,39%.
Запас усиления составляет 21,8 дБ.
Запас по фазе составляет 65,6 градуса.
Отклик системы соответствует всем проектным требованиям.
bodeplot | Конструктор системы управления
