Проектирование корневого локуса - это общий метод проектирования системы управления, в котором выполняется редактирование коэффициента усиления компенсатора, полюсов и нулей на диаграмме корневого локуса.
Поскольку коэффициент усиления k системы управления с разомкнутым контуром изменяется в непрерывном диапазоне значений, диаграмма корневого локуса показывает траектории полюсов системы обратной связи с замкнутым контуром. Например, в следующей системе отслеживания:
P (s) является растением, H (s) является динамикой датчика, и k является регулируемым скалярным усилением
s) H (s)
Метод корневого локуса состоит в построении контурных траекторий полюсов в комплексной плоскости по мере изменения k. Этот график можно использовать для определения значения коэффициента усиления, связанного с требуемым набором полюсов замкнутого контура.
В этом примере показано, как сконструировать компенсатор для электрогидравлического сервомеханизма с использованием методов графической настройки корневого локуса.
Модель установки
Простая версия модели электрогидравлического сервомеханизма состоит из:
Двухтактный усилитель (пара электромагнитов)
Скользящий золотник в сосуде с гидравлической жидкостью высокого давления
Отверстия клапанов в сосуде для обеспечения протекания жидкости
Центральная камера с плунжером с поршневым приводом для подачи усилия на груз
Симметричная емкость для возврата жидкости
Усилие на катушке пропорционально току в катушке электромагнита. По мере перемещения золотника клапан открывается, позволяя гидравлической жидкости высокого давления проходить через камеру. Движущаяся текучая среда заставляет поршень двигаться в противоположном направлении от катушки. Для получения дополнительной информации об этой модели, включая вывод линеаризованной модели, см. [1].
Для управления положением плунжера можно использовать входное напряжение электромагнита. При наличии измерений положения плунжера можно использовать обратную связь для управления положением плунжера, как показано ниже, где Gservo представляет сервомеханизм:

Требования к конструкции
В этом примере отрегулируйте компенсатор C (ы) так, чтобы он удовлетворял следующим требованиям к ступенчатой реакции с замкнутым контуром:
Время отстаивания 2% составляет менее 0,05 с.
Максимальное превышение составляет менее 5%.
Конструктор открытых систем управления
В командной строке MATLAB ® загрузите линеаризованную модель сервомеханизма и откройте конструктор систем управления в конфигурации редактора корневого локуса.
load ltiexamples Gservo controlSystemDesigner('rlocus',Gservo);
Приложение открывается и импортируется Gservo в качестве модели установки для архитектуры управления по умолчанию, Конфигурация 1.
В Конструкторе систем управления открывается график редактора корневых локусов (Root Locus Editor) и ответ шага ввода-вывода (input-output Step Response).
Для одновременного просмотра частотной характеристики с разомкнутым контуром и ступенчатой характеристики с замкнутым контуром щелкните и перетащите графики в нужное место.
В приложении отображаются графики «Редактор модов» и «Пошаговый ответ».
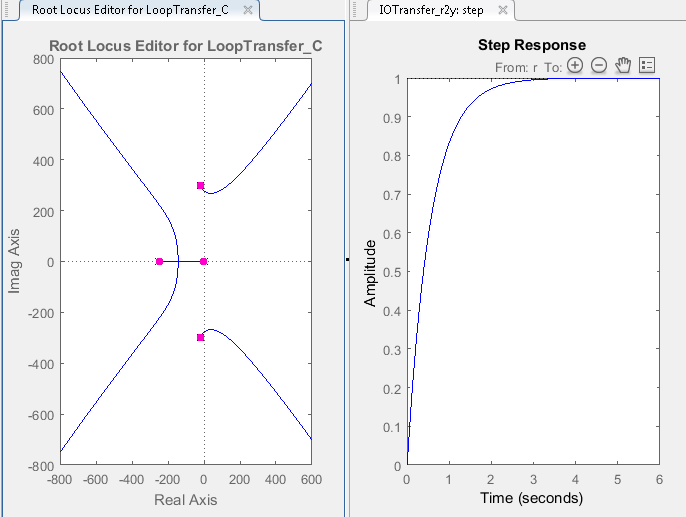
На графике ступенчатой реакции с замкнутым контуром время нарастания составляет около двух секунд, что не удовлетворяет проектным требованиям.
Чтобы облегчить чтение диаграммы корневого локуса, увеличьте масштаб изображения. В редакторе корневых локусов щелкните правой кнопкой мыши область печати и выберите «Свойства».
В диалоговом окне «Редактор свойств» на вкладке «Пределы» задайте пределы реальной и воображаемой осей из -500 кому 500.
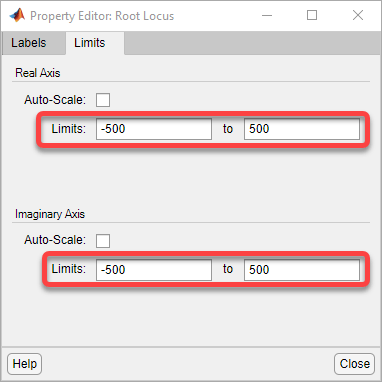
Щелкните Закрыть (Close).
Увеличение коэффициента усиления компенсатора
Чтобы создать более быстрый отклик, увеличьте коэффициент усиления компенсатора. В редакторе корневого местоположения щелкните правой кнопкой мыши область печати и выберите «Редактировать компенсатор».
В диалоговом окне «Редактор компенсаторов» задайте коэффициент усиления 20.
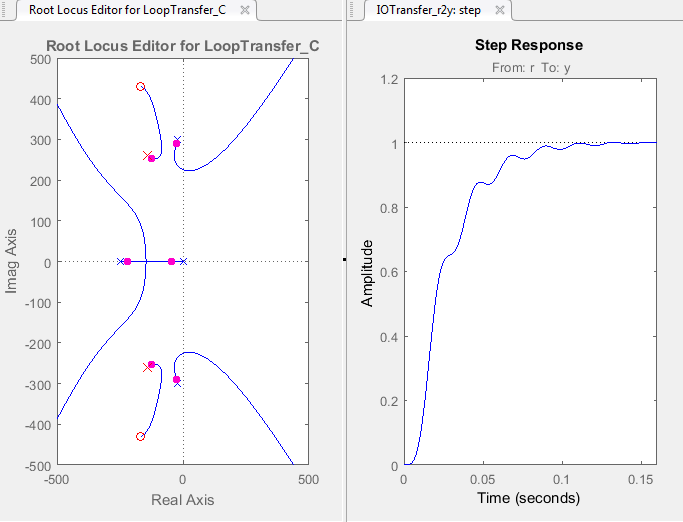
На графике Root Locus Editor расположения полюсов с замкнутым контуром перемещаются, отражая новое значение усиления. Кроме того, обновляется график ответа на шаг.
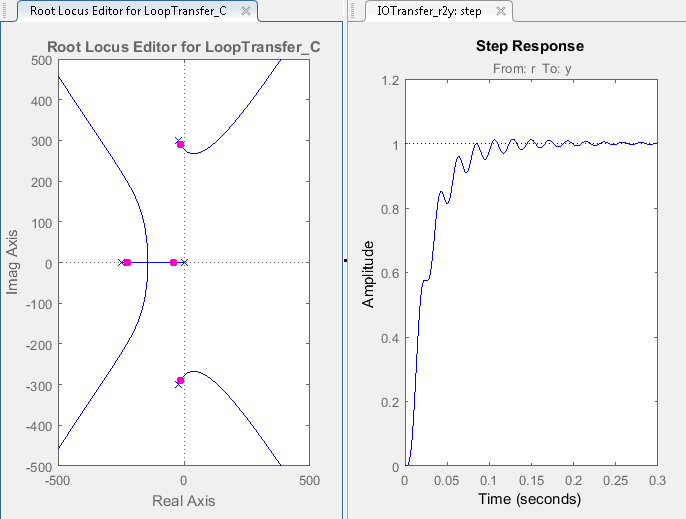
Реакция с замкнутым контуром не удовлетворяет требованию времени установки и проявляет нежелательный вызывной сигнал.
Увеличение коэффициента усиления делает систему недостаточно демпфируемой, а дальнейшее увеличение приводит к нестабильности. Поэтому для соответствия проектным требованиям необходимо указать дополнительную динамику компенсатора. Дополнительные сведения о добавлении и правке динамики компенсатора см. в разделе Правка динамики компенсатора.
Добавление полюсов в компенсатор
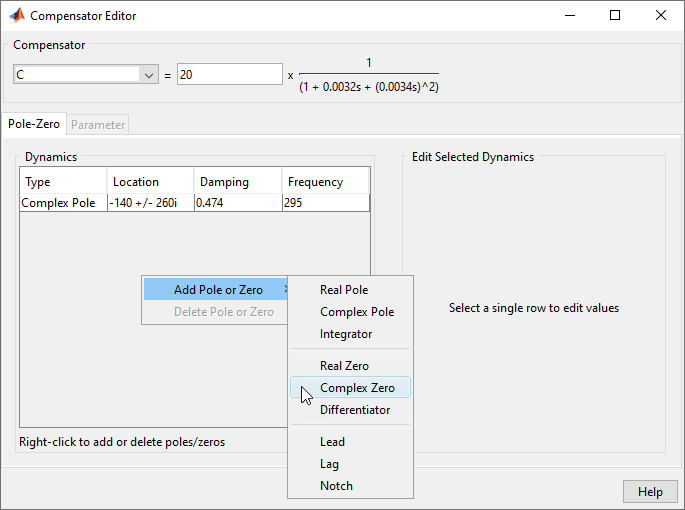
Чтобы добавить сложную пару полюсов в компенсатор, в редакторе корневого местоположения щелкните правой кнопкой мыши область печати и выберите «Добавить полюс/нуль» > «Комплексный полюс». Щелкните область печати, в которую требуется добавить один из сложных полюсов.
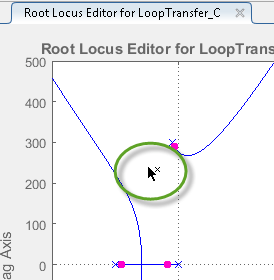
Приложение добавляет сложную пару полюсов в график корневого локуса красным X«s» и обновляет график ответа на шаг.
В редакторе корневых локусов перетащите новые полюса в расположение около -140 ± 260i. При перетаскивании одного полюса он обновляется автоматически.
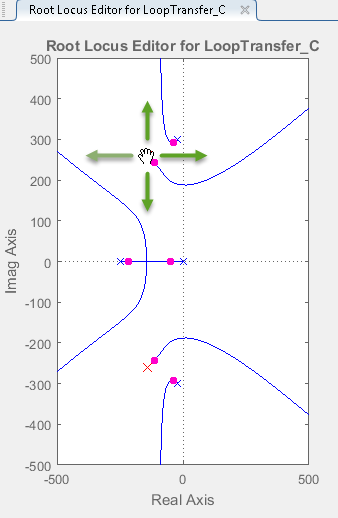
Совет
При перетаскивании полюса или нуля приложение отображает новое значение в строке состояния с правой стороны.

Добавить нули в компенсатор
Чтобы добавить сложную нулевую пару к компенсатору, в диалоговом окне Редактор компенсатора щелкните правой кнопкой мыши таблицу Dynamics и выберите Добавить полюс/ноль > Комплексный ноль
Приложение добавляет пару комплексных нулей в -1 ± i к компенсатору
В таблице Dynamics щелкните строку Комплексный ноль. Затем в разделе Править выбранную динамику укажите действительную часть -170 и воображаемая часть 430.
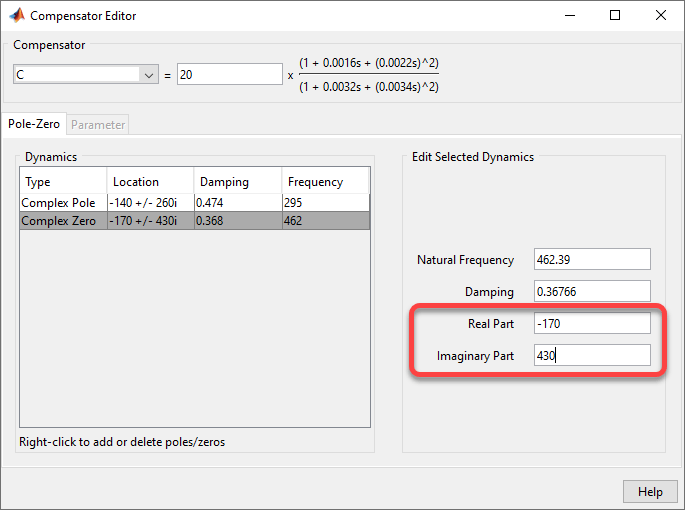
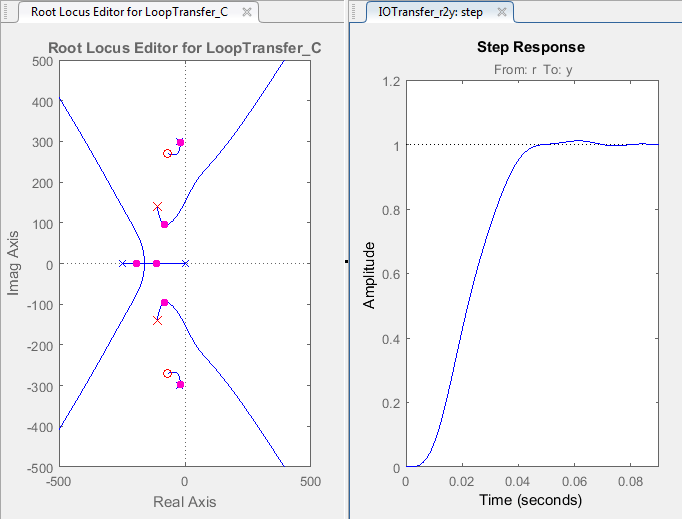
Графики компенсатора и ответа автоматически обновляются для отражения новых нулевых местоположений.
На графике Step Response время установки составляет около 0,1 секунды, что не соответствует проектным требованиям.
Настройка расположения полюсов и нулей
Процесс проектирования компенсатора может включать в себя пробу и ошибку. Отрегулируйте коэффициент усиления компенсатора, положения полюсов и нулевые положения до тех пор, пока не будут соблюдены критерии проектирования.
Одна возможная конструкция компенсатора, удовлетворяющая проектным требованиям:
Коэффициент усиления компенсатора 10
Сложные полюса при -110 ± 140i
Комплексные нули при -70 ± 270i
В диалоговом окне Редактор компенсаторов настройте компенсатор, используя эти значения. На графике Step Response время установки составляет около 0,05 секунды.
Чтобы проверить точное время настройки, щелкните правой кнопкой мыши область графика Ответ шага (Step Response) и выберите Признаки (Characteristics) > Время настройки (Settling Time). На графике ответа появляется индикатор времени расчета.
Для просмотра времени настройки наведите курсор на индикатор времени настройки.
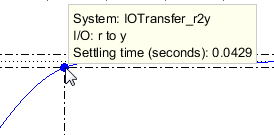
Время отстаивания составляет около 0,043 секунды, что удовлетворяет проектным требованиям.
[1] Кларк, R.N. Control System Dynamics, Cambridge University Press, 1996.
Конструктор системы управления | rlocusplot
