Во многих случаях применение одноконтурной системы управления невозможно из-за требований к конструкции или конструкции установки. При наличии конструкции с внутренним и внешним контурами можно использовать конструктор систем управления для проектирования компенсаторов для обоих контуров.
Типичная процедура состоит в том, чтобы сначала настроить компенсатор для внутреннего контура, изолировав внутренний контур от остальной части системы управления. После удовлетворительной настройки внутреннего контура настройте внешний контур, чтобы получить требуемый отклик замкнутого контура.
Для этого примера разработать систему управления положением двигателя постоянного тока. Одноконтурный регулятор угловой скорости разработан в Bode Diign Design. Чтобы создать контроллер углового положения, добавьте внешний контур, содержащий интегратор.
Определите модель установки в пространстве состояний, как описано в примере SISO «Двигатель постоянного тока».
% Define the motor parameters R = 2.0 L = 0.5 Km = .015 Kb = .015 Kf = 0.2 J = 0.02 % Create the state-space model A = [-R/L -Kb/L; Km/J -Kf/J] B = [1/L; 0]; C = [0 1]; D = [0]; sys_dc = ss(A,B,C,D);
Целью проектирования является минимизация времени установки ступенчатого отклика с замкнутым контуром при сохранении запаса фазы с внутренним контуром не менее 65 градусов с максимальной шириной полосы:
Минимальное время установки ступенчатого отклика с замкнутым контуром.
Запас фазы внутреннего контура не менее 65 градусов.
Максимальная пропускная способность внутреннего контура.
Control System Designer имеет шесть возможных архитектур управления, из которых можно выбрать. Дополнительные сведения об этих архитектурах см. в разделе Архитектуры управления обратной связью.
В этом примере используется конфигурация 4, которая имеет внутренний и внешний контуры управления.

В настоящее время структура системы управления не соответствует конфигурации 4. Однако с помощью алгебры блок-схем можно изменить модель системы, добавив:
Интегратор на выходе двигателя для получения углового смещения.
Дифференциатор пути обратной связи с внутренним контуром.
В командной строке MATLAB ® добавьте интегратор в модель моторного завода.
plant = sys_dc*tf(1,[1,0]);
Создайте начальную модель компенсатора внутреннего контура, которая содержит дифференциатор обратной связи.
Cdiff = tf('s');Откройте конструктор системы управления.
controlSystemDesigner
В конструкторе систем управления на вкладке Система управления щелкните Изменить архитектуру.
В диалоговом окне «Редактирование архитектуры» в разделе «Выбор архитектуры управления» выберите четвертую архитектуру.
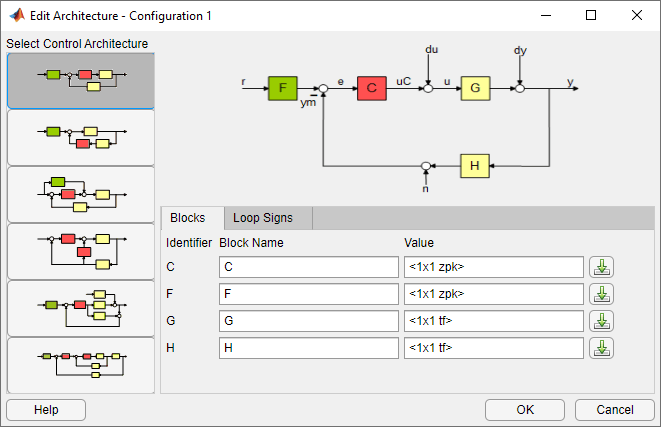
Импортируйте модели завода и контроллера из рабочего пространства MATLAB.
На вкладке «Блоки» выполните следующие действия.
C2 контроллера, укажите значение Cdiff.
Завод G, укажите значение plant.
Нажмите кнопку ОК.
Приложение обновляет архитектуру управления и импортирует указанные модели для моторной установки и контроллера внутреннего контура.
В конструкторе систем управления открываются следующие графики:
Редактор модов для LoopTransfer_C1 - Редактор модов с открытым контуром для внешнего контура
Редактор корневых локусов для LoopTransfer_C1 - редактор корневых локусов с открытым контуром для внешнего контура
Редактор модов для LoopTransfer_C2 - Редактор модов с открытым контуром для внутреннего цикла
Редактор корневого локуса для LoopTransfer_C2 - редактор корневого локуса с открытым контуром для внутреннего цикла
IOTransfer_r2y: step - Общий отклик шага с замкнутым контуром от входа r к выходу y
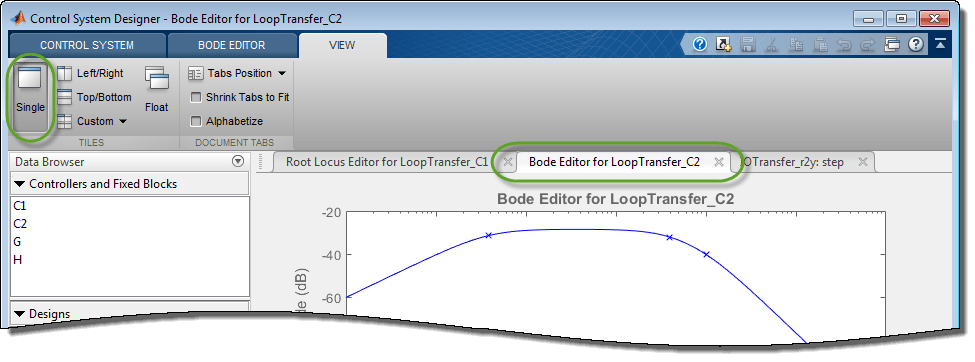
В этом примере закройте Редактор модов для LoopTransfer_C1 и Редактор корневых локусов для LoopTransfer_C2 графиков.
Поскольку сначала настраивается внутренний цикл, настройте графики так, чтобы они отображались только на графике редактора Bode с внутренним циклом. На вкладке Вид (View) нажмите кнопку Один (Single), а затем выберите Редактор модов (Bode Editor) для LoopTransfer_C2.
Чтобы изолировать внутренний контур от остальной архитектуры системы управления, добавьте размыкание контура к отклику разомкнутого контура внутреннего контура. В браузере данных щелкните правой кнопкой мыши LoopTransfer_C2и выберите «Открыть выделенный фрагмент».
Чтобы добавить размыкание контура на выходе компенсатора внешнего контура, C1 в диалоговом окне Функция передачи разомкнутого контура (Open-Loop Transfer Function) щелкните![]() Добавить расположение размыкания контура в список. Затем выберите uC1.
Добавить расположение размыкания контура в список. Затем выберите uC1.
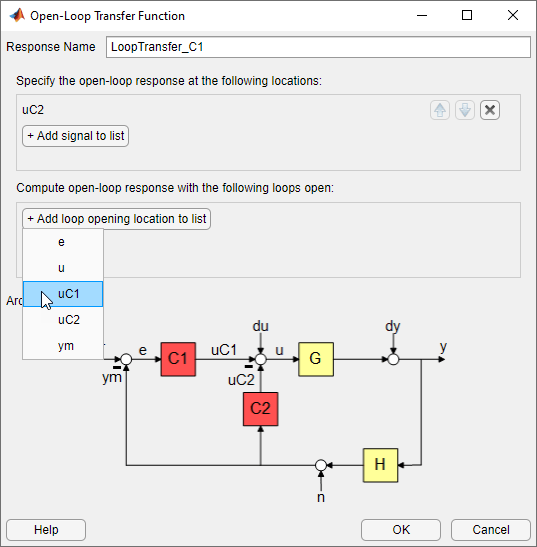
Нажмите кнопку ОК.
Приложение добавляет открытие цикла в выбранном расположении. Это отверстие устраняет влияние внешнего контура управления на передаточную функцию разомкнутого контура внутреннего контура.
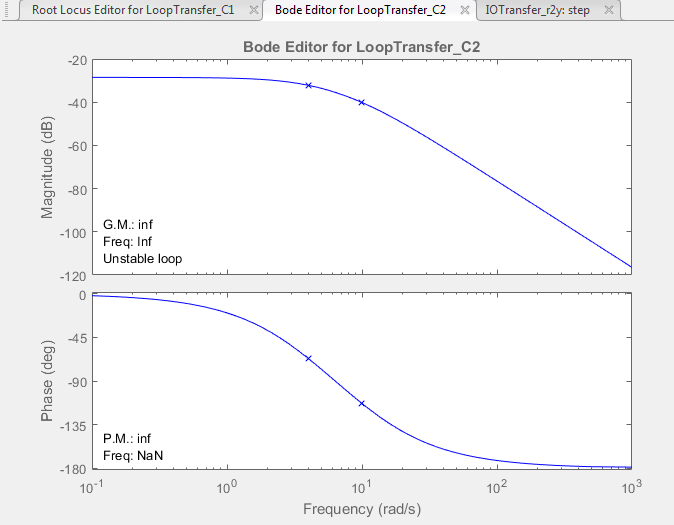
График ответа редактора бодов обновляется для отражения новой функции передачи с разомкнутым контуром.
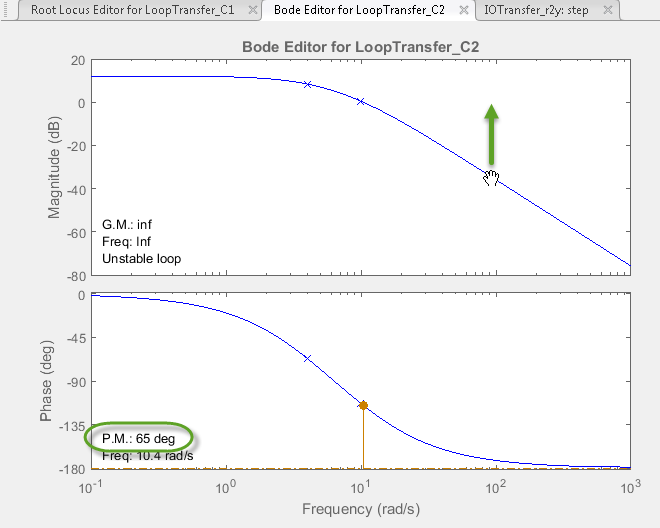
Для увеличения полосы пропускания внутреннего контура увеличить коэффициент усиления компенсатора C2.
На графике редактора модов перетащите отклик величины вверх до тех пор, пока поле фазы не станет равным 65 градусам. Это соответствует коэффициенту усиления компенсатора 107. Увеличение коэффициента усиления дополнительно уменьшает фазовый запас ниже 65 градусов.
Можно также скорректировать значение коэффициента усиления с помощью редактора компенсатора. Дополнительные сведения см. в разделе Правка компенсатора Dynamics.
После настройки внутреннего контура можно настроить внешний контур, чтобы сократить время установки замкнутого контура.
В конструкторе систем управления на вкладке «Вид» выберите «Слева/Справа». Расположите графики так, чтобы они отображали корневой локус для LoopTransfer_C1 и IOTransfer_r2y_step графиков одновременно.
Для просмотра текущего времени настройки щелкните правой кнопкой мыши на графике ответа на шаг и выберите Characteristics > Settling Time.
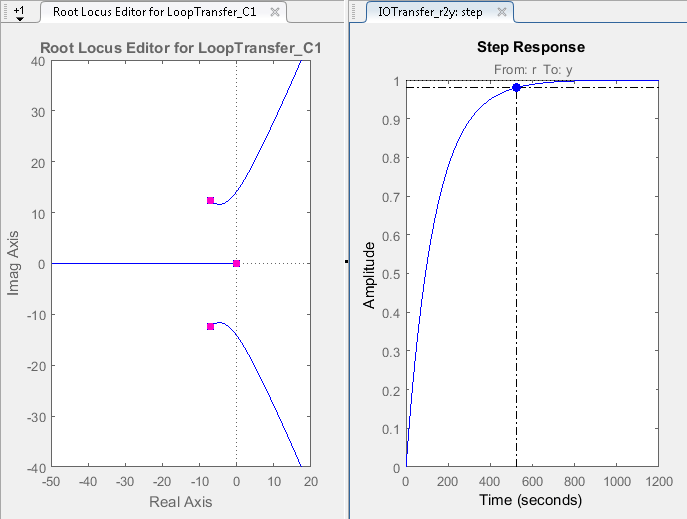
Текущее время установки по замкнутому контуру превышает 500 секунд.
В редакторе корневых локусов увеличьте коэффициент усиления C1 компенсатора. По мере увеличения коэффициента усиления пара сложных полюсов движется к более медленной постоянной времени, а реальный полюс движется к более быстрой постоянной времени. Выигрыш 600 обеспечивает хороший компромисс между временем нарастания и временем отстоя.
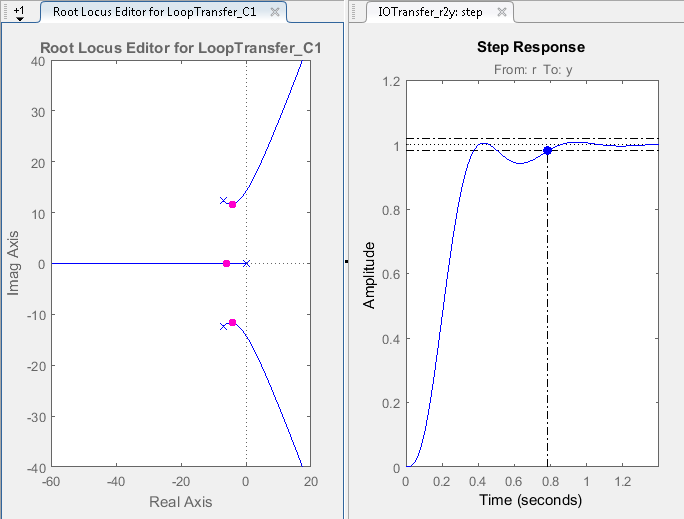
При времени осадки по замкнутому контуру ниже 0,8 секунды и пределе фазы по внутреннему контуру 65 градусов конструкция удовлетворяет проектным требованиям.
Конструктор системы управления
