В этом примере показано, как с помощью PID-тюнера проектировать контроллер PID с двумя степенями свободы (2-DOF). В примере также сравнивается производительность контроллера 2-DOF с производительностью, достигнутой с помощью 1-DOF PID контроллера.
В этом примере завод представлен как модель LTI. Сведения об использовании PID-тюнера для настройки блока PID-контроллера (2DOF) в модели Simulink ® см. в разделе Проектирование двухстепенных PID-контроллеров (Simulink Control Design).
2-DOF Контроллеры PID включают взвешивание уставки на пропорциональном и производном слагаемых. По сравнению с 1-DOF ПИД-контроллером, 2-DOF ПИД-контроллер может достичь лучшего отклонения возмущений без значительного увеличения превышения в отслеживании уставок. Типичную архитектуру контроля, используя диспетчера PID с 2 финансовыми департаментами показывают в следующей диаграмме.

Для этого примера сначала спроектируйте контроллер 1-DOF для установки, заданный следующим образом:
5s + 0,1.
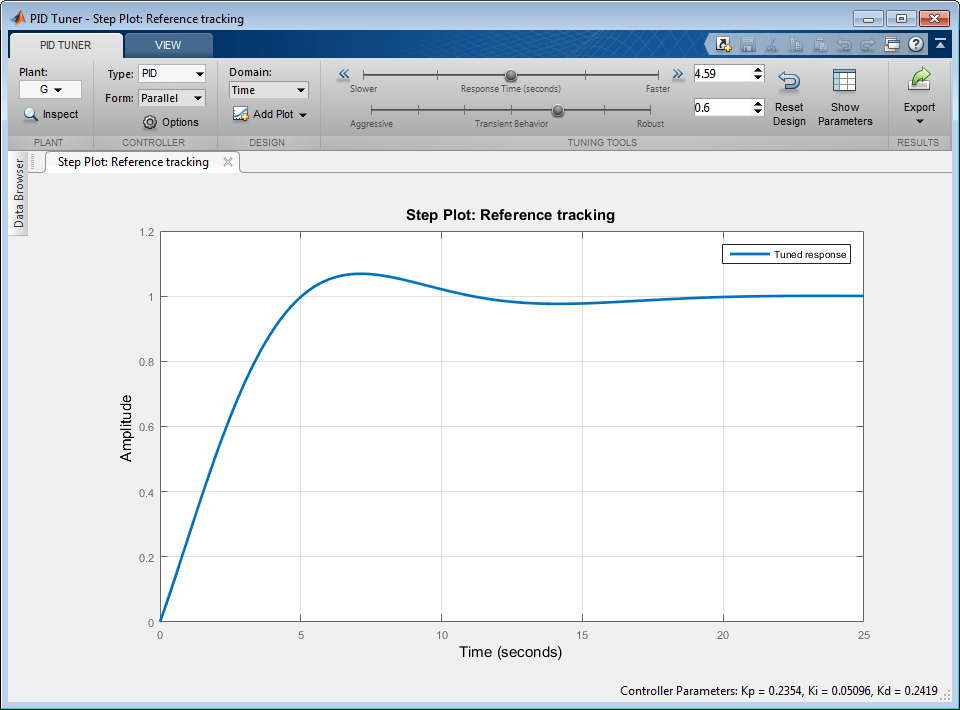
G = tf(1,[1 0.5 0.1]); pidTuner(G,'PID')
Предположим, что для этого примера приложение требует более быстрого ответа, чем первоначальный проект PID-тюнера. В текстовом поле рядом с ползуном Время ответа введите 2.
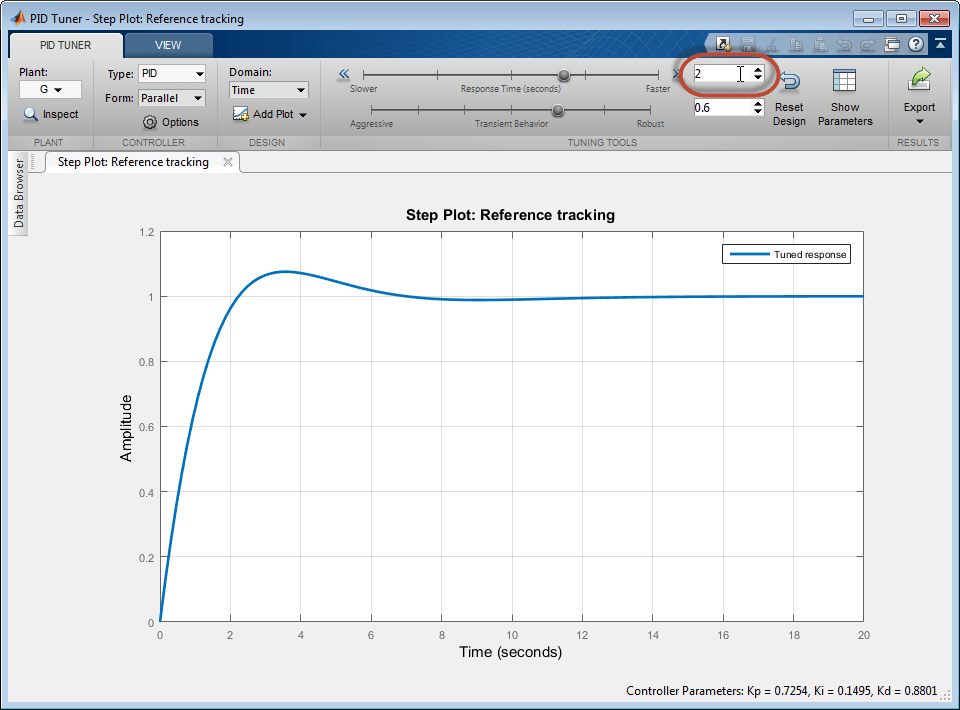
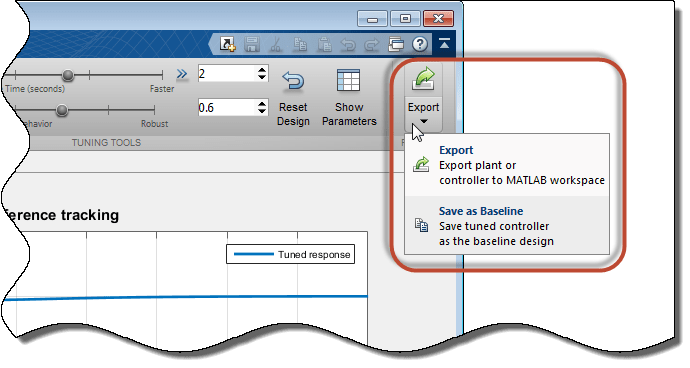
Полученный отклик является быстрым, но имеет значительный перерасход. Спроектируйте контроллер 2-DOF, чтобы улучшить перегрузку. Сначала установите контроллер 1-DOF в качестве базового контроллера для сравнения. Щелкните стрелку «Экспорт![]() » и выберите
» и выберите Save as Baseline.
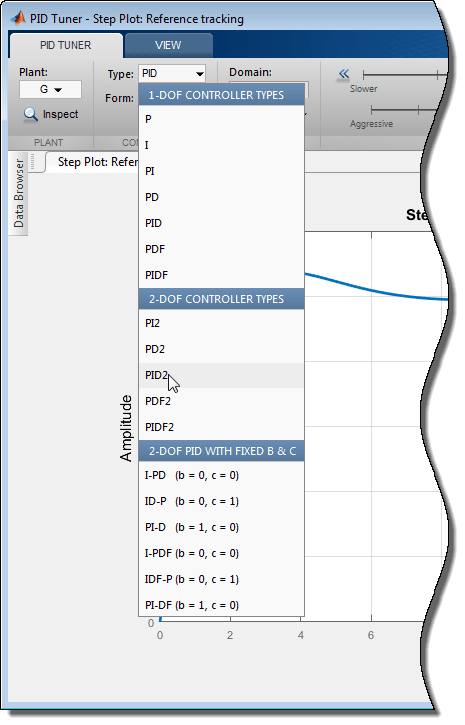
Спроектируйте контроллер 2-DOF. В меню «Тип» выберите PID2.
PID-тюнер генерирует контроллер 2-DOF с тем же целевым временем отклика. Параметры контроллера, отображаемые в правом нижнем углу, показывают, что PID-тюнер настраивает все коэффициенты контроллера, включая веса уставок. b и c, чтобы сбалансировать производительность и надежность. Сравните производительность контроллера 2-DOF (сплошная линия) с производительностью контроллера 1-DOF, сохраненного в качестве базовой линии (пунктирная линия).
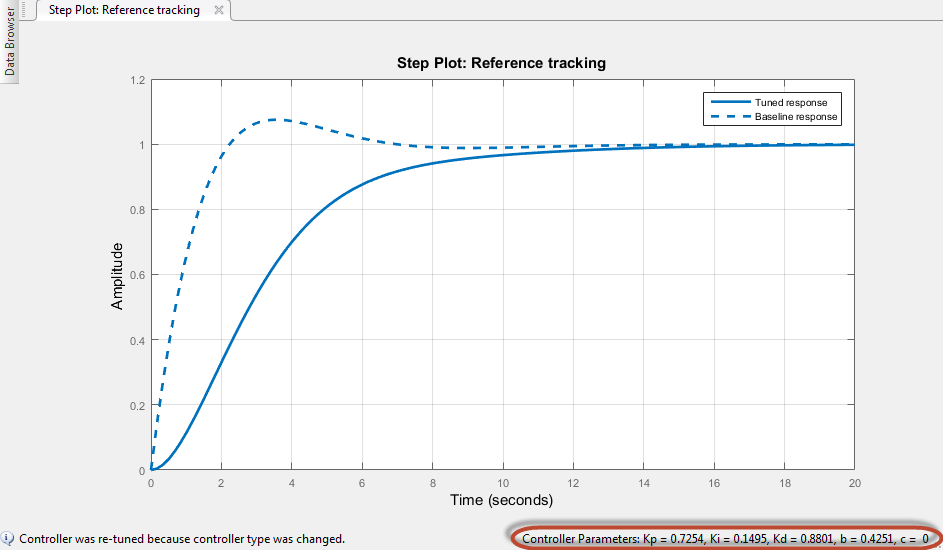
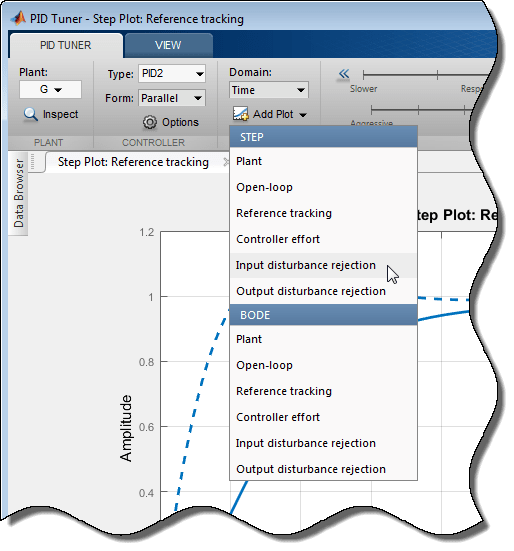
Добавление второй степени свободы устраняет переполнение в отклике отслеживания ссылок. Затем добавьте график ответа на шаг для сравнения характеристик отклонения возмущений двух контроллеров. Выберите «Добавить график» > «Отклонение нарушения ввода».
PID-тюнер накладывает график отклонения-возмущения бок о бок с графиком отслеживания ссылок.

Характеристики возмущения-отбраковки идентичны для обоих контроллеров. Таким образом, использование контроллера 2-DOF устраняет перегрузку опорного отслеживания без каких-либо затрат на отклонение возмущения.
Вы также можете улучшить отклонение возмущений, изменив фокус конструкции PID-тюнера. Сначала щелкните стрелку «Экспорт![]() » и выберите
» и выберите Save as Baseline чтобы установить контроллер 2-DOF в качестве базовой линии для сравнения.
Измените фокус конструкции PID Tuner в пользу отслеживания ссылок без изменения времени отклика или коэффициента переходного поведения. Для этого нажмите «Параметры![]() » и в меню «Фокус» выберите
» и в меню «Фокус» выберите Input disturbance rejection.
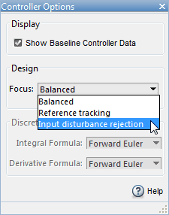
PID-тюнер автоматически перенастраивает коэффициенты контроллера с акцентом на характеристики нарушения-отклонения.
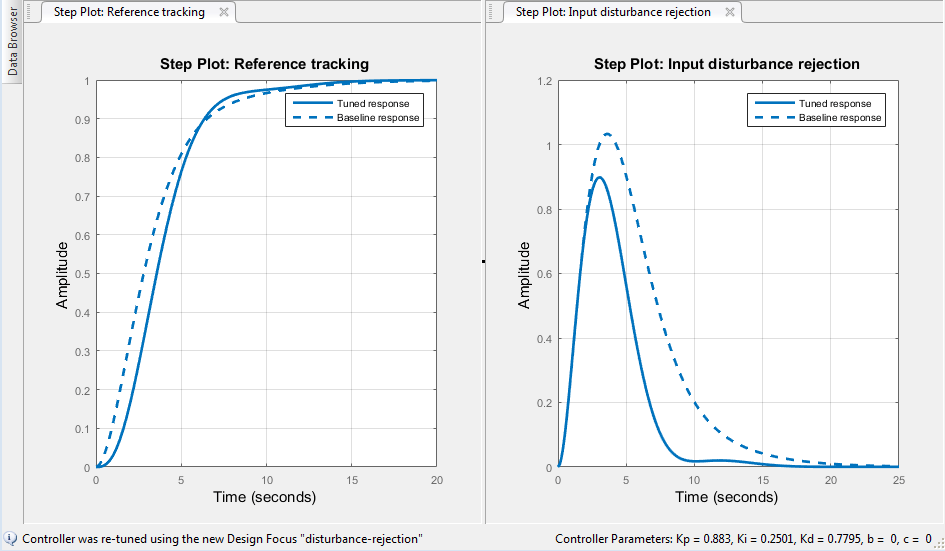
При сбалансированной направленности проекта по умолчанию PID-тюнер выбирает b значение от 0 до 1. Для этого завода, при изменении фокуса конструкции в пользу отклонения нарушений, наборы PID Tuner b = 0 и c = 0. Таким образом, PID-тюнер автоматически генерирует контроллер I-PD для оптимизации для отклонения возмущений. (Явное указание контроллера I-PD без задания проектного фокуса дает аналогичный контроллер.)
Графики ответа показывают, что при изменении фокусировки конструкции отклонение возмущений дополнительно улучшается по сравнению с регулятором сбалансированного 2-DOF. Это улучшение связано с некоторым жертвоприношением производительности отслеживания ссылок, что несколько медленнее. Однако отклик на отслеживание ссылок по-прежнему не имеет превышения.
Таким образом, использование 2-DOF управления может улучшить отклонение возмущений, не жертвуя таким же количеством эталонных характеристик отслеживания, как 1-DOF управление. Это влияние на производительность системы сильно зависит от свойств установки и скорости контроллера. Для некоторых установок и некоторых контрольных полос пропускания использование 2-DOF управления или изменение фокуса проектирования оказывает меньшее влияние на настроенный результат или вообще не влияет на него.
