Открыть тюнер PID для настройки PID
pidTuner(sys,type)
pidTuner(sys,Cbase)
pidTuner(sys)
pidTuner
pidTuner( запускает приложение PID Tuner и разрабатывает контроллер типа sys,type)type для завода sys.
pidTuner( запускает PID-тюнер с базовым контроллером sys,Cbase)Cbase для сравнения производительности между разработанным контроллером и базовым контроллером. Если Cbase является pid, pidstd, pid2 или pidstd2 объект контроллера, PID-тюнер проектирует контроллер той же формы, типа и дискретных формул интегратора, что и Cbase.
pidTuner( конструирует ПИ-контроллер параллельной формы.sys)
pidTuner запускает PID-тюнер с установкой по умолчанию 1 и пропорциональным (P) контроллером 1.
|
Модель установки для проектирования контроллера.
Если растение имеет неустойчивые полюса, и
затем необходимо указать количество неустойчивых полюсов в установке. Для этого после открытия PID Tuner в меню Plant выберите |
|
Тип разрабатываемого контроллера, указанный как символьный вектор. Термин тип контроллера обозначает, какие термины присутствуют в действии контроллера. Например, PI-контроллер имеет только пропорциональный и интегральный член, в то время как PIDF-контроллер содержит пропорциональные, интеграторные и отфильтрованные производные члены. 1-DOF Контроллеры
2-DOF Контроллеры
Дополнительные сведения о 2-DOF контроллеров PID в целом см. в разделе Двухстепенные контроллеры PID. 2-DOF Контроллеры с фиксированными весами уставки
Для более подробной информации о фиксированном весе заданного значения диспетчеры PID с 2 финансовыми департаментами посмотрите диспетчера PID Тайпеса для Настройки. Форма контроллераПри использовании Если
Дополнительные сведения о формулах дискретных интеграторов см. в разделе |
|
Динамическая система, представляющая базовый контроллер, позволяющая сравнивать производительность проектируемого контроллера с производительностью Если
Если |
Интерактивная настройка PID контроллера параллельной формы
Запуск PID-тюнера для проектирования параллельного контроллера PIDF для установки дискретного времени:
Gc = zpk([],[-1 -1 -1],1); Gd = c2d(Gc,0.1); % Create discrete-time plant pidTuner(Gd,'pidf') % Launch PID Tuner
Интерактивная настройка PID контроллера стандартной формы с использованием метода дискретизации интегратора
Проектирование стандартного контроллера PIDF с использованием BackwardEuler формула дискретного интегратора:
Gc = zpk([],[-1 -1 -1],1);
Gd = c2d(Gc,0.1); % Create discrete-time plant
% Create baseline controller.
Cbase = pidstd(1,2,3,4,'Ts',0.1,...
'IFormula','BackwardEuler','DFormula','BackwardEuler')
pidTuner(Gd,Cbase) % Launch PID TunerPID-тюнер проектирует контроллер для Gd имеющие ту же форму, тип и дискретные интеграторные формулы, что и Cbase. Для сравнения можно просмотреть графики ответов Cbase с графиками ответов разработанного контроллера, установив флажок Show baseline в PID Tuner.
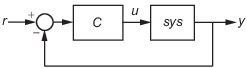
Если type или Cbase задает контроллер PID с одной степенью свободы (1-DOF), затем pidTuner конструирует контроллер для контура единичной обратной связи, как показано:
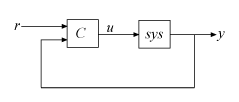
Если type или Cbase задает контроллер PID с двумя степенями свободы (2-DOF), затем pidTuner конструирует контроллер 2-DOF, как в контуре обратной связи этой иллюстрации:
Тюнер PID имеет целевой запас фазы по умолчанию 60 градусов и автоматически настраивает прирост PID для балансировки производительности (время отклика) и надежности (пределы стабильности). Используйте ползунки Время отклика или Полоса пропускания и Запас по фазе, чтобы настроить производительность контроллера в соответствии с вашими требованиями. Повышение производительности обычно снижает надежность и наоборот.
Выберите графики ответа в меню «Ответ» для анализа производительности контроллера.
Если вы предоставите Cbase, установите флажок Показать опорную структуру (Show baseline), чтобы отобразить ответ контроллера базовой структуры.
Более подробную информацию об использовании PID-тюнера см. в разделе Проектирование PID-контроллеров с PID-тюнером.
Для получения информации о интерактивной настройке PID в интерактивном редакторе см. задачу Настройка контроллера PID в интерактивном редакторе. Эта задача позволяет в интерактивном режиме проектировать контроллер PID и автоматически генерировать код MATLAB ® для сценария в реальном времени.
Сведения об алгоритме настройки PID MathWorks ® см. в разделе Алгоритм настройки PID.
Можно открыть PID-тюнер с рабочего стола MATLAB на вкладке «Приложения». При этом используйте меню Plant в PID Tuner для определения модели завода.
Для настройки PID в командной строке используйте pidtune. pidtune команда может проектировать контроллер для нескольких установок одновременно.
Для получения информации о интерактивной настройке PID в интерактивном редакторе см. задачу Настройка контроллера PID в интерактивном редакторе. Эта задача позволяет в интерактивном режиме проектировать контроллер PID и автоматически генерировать код MATLAB для сценария в реальном времени.
Oström, K. J. и Hägglund, T. Advanced PID Control, Research Triangle Park, NC: Instrumentation, Systems, and Automation Society, 2006.
