Обнаружение экранных объектов на графике птичьего глаза
plotDetection( отображает обнаруженные объекты из списка позиций объектов на графике птичьего глаза. Плоттер обнаружения, detPlotter,positions)detPlotter, связан с birdsEyePlot и настраивает отображение указанных обнаружений.
Удаление всех обнаружений, связанных с плоттером обнаружения detPlotter, вызовите clearData функции и указать detPlotter в качестве входного аргумента.
plotDetection( отображает обнаружения и их скорости на графике птичьего глаза.detPlotter,positions,velocities)
plotDetection( отображает обнаружения и их метки на графике птичьего глаза.detPlotter,positions,labels)
plotDetection( отображает обнаружения и их скорости и метки на графике птичьего глаза. detPlotter,positions,velocities,labels)velocities и labels может появляться в любом порядке, но должно приходить после detPlotter и positions.
Создайте график птичьего глаза с диапазоном осей X от 0 до 90 метров и с диапазоном осей Y от -35 до 35 метров.
bep = birdsEyePlot('XLim',[0 90],'YLim',[-35 35]);

Отображение зоны покрытия с 35-градусным полем обзора и 60-метровым диапазоном.
caPlotter = coverageAreaPlotter(bep,'DisplayName','Radar coverage area'); mountPosition = [1 0]; range = 60; orientation = 0; fieldOfView = 35; plotCoverageArea(caPlotter,mountPosition,range,orientation,fieldOfView);

Отображение радиолокационных обнаружений с координатами (30, -5), (50, -10) и (40, 7).
radarPlotter = detectionPlotter(bep,'DisplayName','Radar detections'); plotDetection(radarPlotter,[30 -5; 50 -10; 40 7]);

Создайте график птичьего глаза с диапазоном осей X от 0 до 90 метров и с диапазоном осей Y от -35 до 35 метров. Создайте плоттер радиолокационного обнаружения, отображающий обнаруженные объекты синим цветом.
bep = birdsEyePlot('XLim',[0 90],'YLim',[-35 35]); detPlotter = detectionPlotter(bep,'DisplayName','Radar detections', ... 'MarkerFaceColor','b');

Отображение положений и скоростей трех помеченных обнаружений.
positions = [30 5; 30 -10; 30 15];
velocities = [-10 0; -10 3; -10 -4];
labels = {'D1','D2','D3'};
plotDetection(detPlotter,positions,velocities,labels);
detPlotter - Плоттер обнаруженияDetectionPlotter объектПлоттер обнаружения, указанный как DetectionPlotter объект. Этот объект хранится в Plotters свойство birdsEyePlot и конфигурирует отображение указанных обнаружений на графике птичьего глаза. Чтобы создать этот объект, используйте detectionPlotter функция.
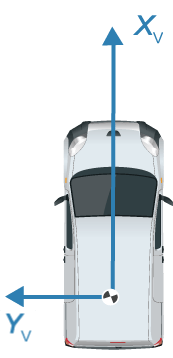
positions - Положения обнаруженных объектовПоложения обнаруженных объектов в координатах транспортного средства, определяемые как M-by-2 действительная матрица положений (X, Y). M - количество обнаруженных объектов. Положительное направление X указывает перед центром транспортного средства. Положительное направление Y указывает влево от начала координат транспортного средства, которое является центром задней оси, как показано на этом рисунке системы координат транспортного средства.
velocities - Скорости обнаруженных объектовСкорости обнаруженных объектов, задаваемые как M-by-2 действительная матрица скоростей в направлении (X, Y). M - количество обнаруженных объектов. Скорости строятся как линейные векторы, исходящие из центральных положений обнаружений при их отслеживании.
labels - Метки обнаруженияМетки обнаружения, заданные как строковый массив M-длины или массив ячеек M-длины символьных векторов. M - количество обнаруженных объектов. Метки соответствуют расположениям в positions матрица. По умолчанию обнаруженные объекты не имеют меток. Для удаления всех аннотаций и меток, связанных с плоттером обнаружения, используйте clearData функция.
