Прямоугольная модель движения цели с постоянной скоростью поворота
updatedstates = ctrect(states)states на основе прямоугольной модели движения цели. Шаг времени по умолчанию - 1 секунда.
updatedstates = ctrect(states,dt)dt, в секундах.
updatedstates = ctrect(states,w,dt)w.
states - Текущие прямоугольные состоянияТекущие прямоугольные состояния, задаваемые как вектор вещественного значения 1 на 7, вектор вещественного значения 7 на 1 или 7-by-N матрица вещественного значения, где N - число состояний. Семизмерное прямоугольное целевое состояние определяется как [x; y; s; θ; ω; L; W]:
| Переменная | Значение | Единица |
| x | Положение центра прямоугольника в направлении x | m |
| y | Положение центра прямоугольника в направлении y | m |
| s | Скорость в направлении курса | м/с |
| θ | Угол ориентации прямоугольника относительно направления x | степень |
| ω | Скорость поворота | степень/с |
| L | Длина прямоугольника | m |
| W | Ширина прямоугольника | m |
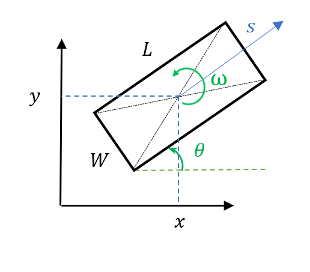
Пример: [1;2;2;30;1;4.7;1.8]
Типы данных: single | double
dt - Шаг времениВременной шаг, заданный как действительный положительный скаляр в секунду.
Типы данных: single | double
w - Технологический шумШум процесса, заданный как 2-by-N вещественно-значная матрица, где N - количество состояний, указанных в states вход. Если указан как скаляр, он расширяется до 2-by-N матрицы со всеми элементами, равными скаляру. Первая строка матрицы определяет шум процесса в ускорении (m/s2). Во второй строке указывается шум процесса в ускорении рыскания (градусы/с2).
Типы данных: single | double
ctrectcorners | ctrectjac | ctrectmeas | ctrectmeasjac | gmphd | initctrectgmphd | trackerPHD
