Track-Oriented Multi-Гипотеза-трекер
Панель инструментов для слияния и отслеживания датчиков/алгоритмы отслеживания нескольких объектов
Блок Track-Oriented Multi-Topeesis Tracker обрабатывает обнаружения нескольких целей от нескольких датчиков. Блок трекера инициализирует, подтверждает, прогнозирует, корректирует и удаляет дорожки. Входами в блок трекера являются отчеты об обнаружении, генерируемые objectDetection, fusionRadarSensor, irSensor, или sonarSensor объекты. Блок трекера оценивает вектор состояния и ковариационную матрицу вектора состояния для каждой дорожки. Трекер назначает обнаружения, основываясь на ориентированном на дорожки подходе с несколькими гипотезами.
Любой новый трек начинается в предварительном состоянии. Если предварительной дорожке назначено достаточно обнаружений, ее статус изменяется на подтвержденный. Если обнаружение уже имеет известную классификацию ( ObjectClassID поле возвращаемой дорожки ненулевое), эта трасса подтверждается немедленно. Когда дорожка подтверждена, многообъектный трекер рассматривает дорожку как представляющую физический объект. Если обнаружения не назначены дорожке в пределах заданного количества обновлений, дорожка удаляется. Обзор функционирования трекера см. в разделе Алгоритмы.
Detections - Список обнаруженияСписок обнаружения, указанный как шина Simulink, содержащая структуру MATLAB. Структура имеет вид:
| Область | Описание | Напечатать |
|---|---|---|
NumDetections | Количество обнаружений | Целое число |
Detections | Обнаружения объектов | Массив objectDetection конструкции. Первое NumDetections из этих обнаружений являются фактическими обнаружениями. |
Поля структуры обнаружений:
| Область | Описание | Напечатать |
|---|---|---|
Time | Время измерения | Single или Double |
Measurement | Измерения объектов | Single или Double |
MeasurementNoise | Ковариационная матрица шума измерения | Single или Double |
SensorIndex | Уникальный идентификатор датчика | Single или Double |
ObjectClassID | Идентификатор классификации объектов | Single или Double |
MeasurementParameters | Параметры, используемые функциями инициализации фильтров слежения | Шина Simulink |
ObjectAttributes | Дополнительная информация передана трекеру | Шина Simulink |
Посмотрите objectDetection для более подробного пояснения этих полей.
Примечание
Структура обнаружения объекта содержит Time поле. Тег времени каждого обнаружения объекта должен быть меньше или равен времени при текущем вызове блока. Тег времени также должен быть больше времени обновления, указанного в предыдущем вызове блока.
Prediction Time - Отслеживание времени обновленияВремя обновления отслеживания, указанное как действительный скаляр в секундах. Трекер обновляет все дорожки до этого времени. Время обновления всегда должно увеличиваться с каждым вызовом блока. Время обновления должно быть не менее наибольшего Time указан во входном порте Detections.
Если порт не активизирован, время обновления определяется синхросигналом моделирования, управляемым Simulink.
Чтобы включить этот порт, на вкладке Port Setting установите для параметра Prediction time source значение Input port.
Cost Matrix - Матрица затратМатрица затрат, заданная как действительная матрица N-на-М, где N - количество ветвей, а M - количество текущих обнаружений.
Строки матрицы затрат должны находиться в том же порядке, что и список ветвей. Ветви упорядочиваются по мере их появления в списке ветвей из выходного порта «Все ветви» при предыдущем вызове блока. Столбцы соответствуют обнаружениям.
При первом обновлении трекера, или если у трекера нет предыдущих дорожек, назначьте матрице затрат размер [0, N]. Стоимость должна быть рассчитана так, чтобы более низкие затраты указывали на более высокую вероятность того, что трекер назначит обнаружение дорожке. Чтобы предотвратить назначение определенных обнаружений определенным дорожкам, используйте Inf.
Если этот порт не активирован, фильтр, инициализированный функцией инициализации фильтра, вычисляет матрицу затрат с помощью метода расстояния.
Чтобы включить этот порт, на вкладке Port Setting выберите Enable cost matrix input.
Detectable BranchIDs - Обнаруживаемые идентификаторы филиаловОбнаруживаемые идентификаторы ветвей, заданные как действительный вектор M-by-1 или матрица M-by-2. Обнаруживаемые ветви - это ветви, которые датчики ожидают обнаружить. Первый столбец матрицы содержит список идентификаторов ветвей, которые датчики сообщают как обнаруживаемые. Дополнительный второй столбец позволяет добавить вероятность обнаружения для каждой ветви. Ветви перечислены в выходных данных «Все ветви» предыдущего вызова блока.
Треки, идентификаторы которых не включены в обнаруживаемые BranchIDs, считаются необнаруживаемыми. Логика удаления дорожки не засчитывает отсутствие обнаружения как «пропущенное обнаружение» для целей удаления дорожки.
Если этот порт не активизирован, то трекер предполагает, что все дорожки могут быть обнаружены при каждом вызове блока.
Чтобы включить этот порт, на вкладке Port Setting выберите Enable detectable branch ID input.
State Parameters - Параметры состояния дорожкиПараметры состояния отслеживания, заданные как шина Simulink, содержащая структуру MATLAB. Структура имеет вид:
| Область | Описание |
|---|---|
NumParameters | Количество нестандартных параметров состояния, указанных как неотрицательное целое число |
Parameters | Массив структур параметров состояния |
Блок использует значение Parameters поле для StateParameters поле сформированных дорожек. Эти параметры можно использовать для определения опорной рамки, в которой сообщается о дорожке, или других требуемых атрибутов сгенерированных дорожек.
Например, можно использовать следующую структуру для определения прямоугольной опорной рамки, исходная позиция которой находится в [10 10 0] метров и чья начальная скорость [2 -2 0] метров в секунду относительно кадра сценария.
| Имя поля | Стоимость |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Чтобы включить этот порт, на вкладке Tracker Configuration выберите параметр Update track state parameters with time.
Confirmed Tracks - Подтвержденные трекиПодтвержденные дорожки, возвращенные как шина Simulink, содержащая структуру MATLAB. Структура имеет вид:
| Область | Описание |
|---|---|
NumTracks | Количество дорожек |
Tracks | Массив структур дорожек длиной, заданной параметром Максимальное количество дорожек. Только первый NumTracks из них фактические треки. |
Поля структуры дорожки отображаются в структуре дорожки.
Дорожка подтверждается, если она удовлетворяет порогу, указанному в параметре Порог подтверждения (Confirmation threshold) на вкладке Логика дорожки (Track Logic).
Tentative Tracks - Предварительные направленияПредварительные трассы, возвращенные в виде шины Simulink, содержащей структуру MATLAB. Трек является предварительным, прежде чем он будет подтвержден.
Поля структуры дорожки отображаются в структуре дорожки.
Чтобы включить этот порт, на вкладке Port Setting выберите Enable tentative tracks output.
All Tracks - Подтвержденные и предварительные направленияСводный список подтвержденных и предварительных дорожек, возвращенных в виде шины Simulink, содержащей структуру MATLAB.
Поля структуры дорожки отображаются в структуре дорожки.
Чтобы включить этот порт, на вкладке Port Setting выберите Enable all tracks output.
Info - Дополнительная информация для анализа обновлений отслеживанияДополнительная информация для анализа обновлений дорожки, возвращенная в виде шины Simulink, содержащей структуру MATLAB.
В этой таблице представлены поля информационной структуры:
| Область | Описание |
BranchIDsAtStepBeginning | Идентификаторы ветвей при запуске обновления. |
CostMatrix | Матрица стоимости назначения. |
Assignments | Назначения, возвращенные из |
UnassignedTracks | Идентификаторы неназначенных ветвей, возвращенные от трекера. |
UnassignedDetections | Идентификаторы неназначенных обнаружений, возвращенные от трекера. |
InitialBranchHistory | История ветвления после ветвления и перед обрезкой. |
InitialBranchScores | Баллы ветвления перед обрезкой. |
KeptBranchHistory | История ветвления после начальной обрезки. |
KeptBranchScores | Баллы ветвления после начальной обрезки. |
Clusters | Преобразование логического массива в кластеры. Ветви принадлежат одному и тому же кластеру, если они совместно используют обнаружения в своей истории или принадлежат к одному и тому же треку либо непосредственно, либо через другие ветви. |
TrackIncompatibility | Матрица несовместимости ветвей. |
GlobalHypotheses | Отображение логической матрицы разветвляется на глобальные гипотезы. Совместимые ветви могут принадлежать в одних и тех же гипотезах. |
GlobalHypScores | Общий балл глобальных гипотез. |
PrunedBranches | Логический массив ветвей, |
GlobalBranchProbabilities | Глобальная вероятность каждой ветви, существующей в глобальных гипотезах. |
BranchesDeletedByPruning | Ветви, удаленные трекером. |
BranchIDsAtStepEnd | Идентификаторы ветвей после завершения обновления. |
Чтобы включить этот порт, на вкладке Port Setting выберите Enable information output.
All Branches - Все филиалыВсе ветви, возвращенные как шина Simulink, содержащая структуру MATLAB.
Поля структуры ветви совпадают со структурой дорожки.
Чтобы включить этот порт, на вкладке Port Setting выберите Enable all branches output.
Tracker identifier - Уникальный идентификатор трекера0 (по умолчанию) | неотрицательное целое числоУникальный идентификатор трекера, указанный как неотрицательное целое число. Этот параметр передается как SourceIndex в выходах трекера и различает дорожки, которые поступают от разных трекеров в системе с несколькими трекерами. Необходимо указать это свойство как положительное целое число, чтобы использовать выходные данные дорожки в качестве входных данных для trackFuser объект.
Пример: 1
Filter initialization function - Функция инициализации фильтра@initcvekf (по умолчанию) | дескриптор функции | символьный векторФункция инициализации фильтра, заданная как дескриптор функции или как символьный вектор, содержащий имя функции инициализации фильтра. Трекер использует функцию инициализации фильтра при создании новых дорожек.
Sensor Fusion and Tracking Toolbox™ обеспечивает множество функций инициализации, совместимых с этим блоком.
| Функция инициализации | Определение функции |
|---|---|
initcvabf | Инициализация фильтра альфа-бета с постоянной скоростью |
initcaabf | Инициализация альфа-бета-фильтра с постоянным ускорением |
initcvekf | Инициализируйте расширенный фильтр Калмана с постоянной скоростью. |
initcackf | Инициализация кубического фильтра с постоянным ускорением. |
initctckf | Инициализация кубатурного фильтра с постоянной скоростью поворота. |
initcvckf | Инициализация кубатурного фильтра постоянной скорости. |
initcapf | Инициализация фильтра частиц с постоянным ускорением. |
initctpf | Инициализация фильтра частиц с постоянной скоростью поворота. |
initcvpf | Инициализация фильтра частиц с постоянной скоростью. |
initcvkf | Инициализируйте линейный фильтр Калмана с постоянной скоростью. |
initcvukf | Инициализация неописанного фильтра Калмана с постоянной скоростью. |
initcaekf | Инициализация расширенного фильтра Калмана с постоянным ускорением. |
initcakf | Инициализация линейного фильтра Калмана с постоянным ускорением. |
initcaukf | Инициализация неописанного фильтра Калмана с постоянным ускорением. |
initctekf | Инициализация расширенного фильтра Калмана с постоянной скоростью поворота. |
initctukf | Инициализация неописанного фильтра Калмана с постоянной скоростью поворота. |
initcvmscekf | Инициализируйте изменяемые сферические координаты с постоянной скоростью с расширенным фильтром Калмана. |
initrpekf | Инициализация постоянного диапазона скоростей - параметризованный расширенный фильтр Калмана. |
initapekf | Инициализируйте постоянный угол скорости-параметризованный расширенный фильтр Калмана. |
initekfimm | Инициализация фильтра IMM отслеживания. |
Также можно создать собственную функцию инициализации. Функция должна иметь следующий синтаксис:
filter = filterInitializationFcn(detection)
objectDetection объект. Вывод этой функции должен быть объектом фильтра: trackingKF, trackingEKF, trackingUKF, trackingCKF, trackingPF, trackingMSCEKF, trackingGSF, trackingIMM, или trackingABF.
Чтобы помочь в написании этой функции, можно изучить подробные сведения о поддерживаемых функциях в MATLAB. Например:
type initcvekfТипы данных: function_handle | char
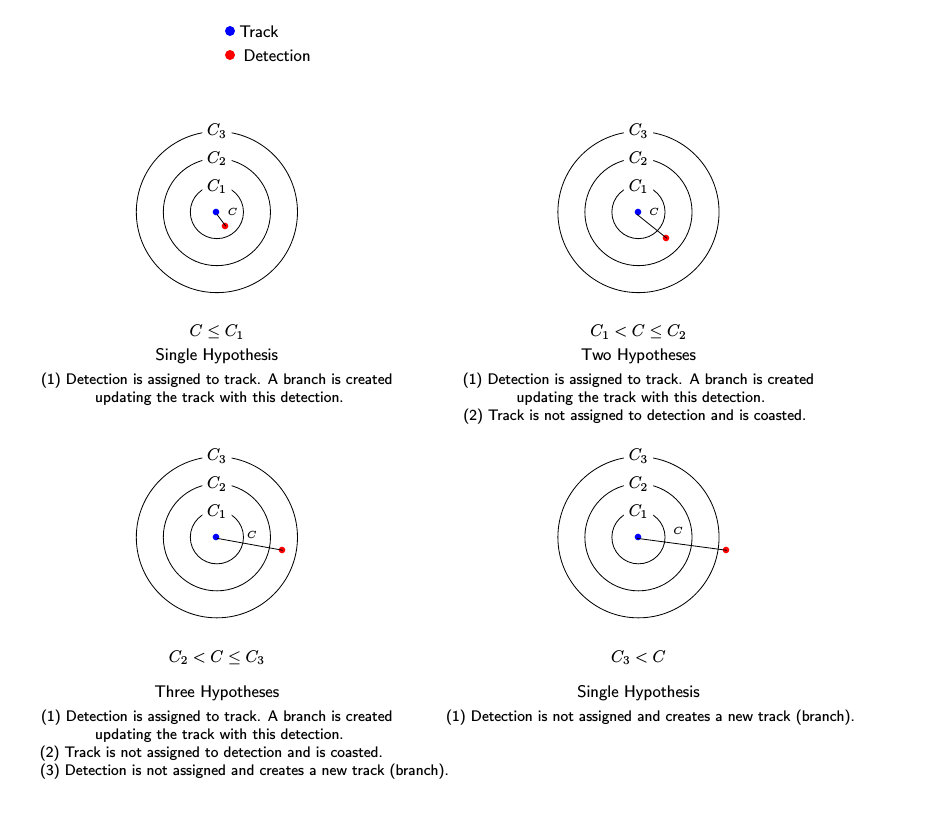
Threshold for assigning detections to tracks - Пороговое значение для назначения обнаружений дорожкам30*[0.3 0.7 1 Inf] (по умолчанию) | положительный скаляр | вектор 1 на 3 положительных значений | вектор 1 на 4 положительных значенийПорог назначения обнаружений дорожкам, определяемый как положительный скаляр, вектор 1 на 3 неубывающих положительных значений, [C1, C2, C3] или вектор a1 на 4 неубывающих положительных значений, [C1, C2, C3, C4]. Если указано как скаляр, указанное значение, val, будет расширено до [0,3,0,7,1,Inf] * вал. Если указан как [C1, C2, C3], он будет расширен как [C1,C2,C3,Inf].
Пороговые значения управляют (1) назначением обнаружения дорожке, (2) созданием новой ветви из обнаружения и (3) созданием новой ветви из неназначенной дорожки. Пороговые значения должны соответствовать: C1 < = C2 < = C3 < = C4.
C1 определяет расстояние так, что если дорожка имеет назначенное обнаружение с меньшим расстоянием, чем C1, дорожка больше не считается неназначенной и не создает неназначенную ветвь дорожки.
C2 определяет расстояние таким образом, что если обнаружение было назначено дорожке с меньшим расстоянием, чем C2, обнаружение больше не считается неназначенным и не создает новую ветвь дорожки.
C3 определяет максимальное расстояние для назначения обнаружения дорожке.
C4 определяет комбинации дорожки и обнаружения, для которых выполняется точный нормированный расчет стоимости. Первоначально трекер выполняет грубую оценку для нормализованного расстояния между всеми дорожками и обнаружениями. Трекер вычисляет только точное нормированное расстояние для комбинаций, грубое нормированное расстояние которых меньше C4.
Совет:
Увеличьте значение C3, если есть обнаружения, которые должны быть назначены дорожкам, но не. Уменьшите значение, если есть обнаружения, которые назначены дорожкам, которым они не должны быть назначены (слишком далеко).
Увеличение значений C1 и C2 помогает контролировать количество создаваемых ветвей дорожки. Тем не менее, это уменьшает количество ветвей (гипотез), которые имеет каждая дорожка.
Увеличьте значение C4, если существуют комбинации дорожки и обнаружения, которые должны быть рассчитаны для назначения, но не являются таковыми. Уменьшите его, если расчет затрат занимает слишком много времени.
Типы данных: single | double
Maximum number of tracks - Максимальное количество дорожек100 (по умолчанию) | положительное целое числоМаксимальное количество дорожек, которое может поддерживать блок, указанное как положительное целое число.
Maximum number of sensors - Максимальное количество датчиков20 (по умолчанию) | положительное целое числоМаксимальное количество датчиков, которые могут быть подключены к трекеру, указанное как положительное целое число. MaxNumSensors должно быть больше или равно наибольшему значению SensorIndex найдено во всех обнаружениях, использованных для обновления трекера. SensorIndex является одним из свойств objectDetection объект. Блок MaxNumSensors свойство определяет, сколько наборов ObjectAttributes поля, которые может иметь каждая дорожка вывода.
Out-of-sequence measurements handling - Обработка несистематических измеренийTerminate (по умолчанию) | neglectОбработка измерений вне последовательности, указанная как Terminate или neglect. Каждое обнаружение имеет связанную с ним временную метку td, и блок трекера имеет собственную временную метку tt, которая обновляется при каждом вызове. Блок трекера рассматривает измерение как OOSM, если td < tt.
Если параметр указан как:
Terminate - Блок прекращает работу, когда он сталкивается с любыми измерениями вне последовательности.
Neglect - Блок игнорирует любые измерения вне последовательности и продолжает работать.
Track state parameters - Параметры опорного кадра состояния путиПараметры опорного кадра состояния дорожки, заданные как структура или массив структуры. Блок передает значение этого параметра в StateParameters поле сформированных дорожек. Эти параметры можно использовать для определения опорной рамки, в которой сообщается о дорожке, или других требуемых атрибутов сгенерированных дорожек.
Например, можно использовать следующую структуру для определения прямоугольной опорной рамки, исходная позиция которой находится в [10 10 0] метров и чья начальная скорость [2 -2 0] метров в секунду относительно кадра сценария.
| Имя поля | Стоимость |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Параметры состояния дорожки можно обновить с помощью входного порта State Parameters, выбрав параметр Update track state parameters with time.
Типы данных: struct
Update track state parameters with time - Обновить параметры состояния дорожки во времениoff (по умолчанию) | onВыберите этот параметр, чтобы включить входной порт для параметров состояния отслеживания через входной порт State Parameters.
Track output method - Метод вывода трека'Tracks' (по умолчанию) | 'Hypothesis' | 'Clusters'Метод вывода дорожки, указанный как 'Tracks', 'Hypothesis', или 'Clusters'.
'Tracks' - Вывод центроида каждого пути на основе его ветвей пути.
'Hypothesis' - Выходные ветви, которые находятся в определённых гипотезах. При выборе этой опции перечислите гипотезы для вывода с помощью HypothesesToOutput собственность.
'Clusters' - Вывод центроида каждого кластера. Аналогично 'Tracks' вывод, но включает все дорожки в кластере.
Типы данных: char
Simulate using - Тип выполняемого моделированияInterpreted Execution (по умолчанию) | Code GenerationInterpreted execution - Моделирование модели с помощью интерпретатора MATLAB. Этот параметр сокращает время запуска. В Interpreted execution можно отладить исходный код блока.
Code generation - моделирование модели с использованием сгенерированного кода C. При первом запуске моделирования Simulink генерирует код C для блока. Код C используется повторно для последующего моделирования до тех пор, пока модель не изменится. Для этого параметра требуется дополнительное время запуска.
Maximum number of hypotheses to be maintained - Максимальное количество гипотез, подлежащих сохранению5 (по умолчанию) | положительное целое числоМаксимальное количество гипотез, поддерживаемых треками в случаях неоднозначности, указанных как положительное целое число. Большие значения увеличивают вычислительную нагрузку.
Пример: 10
Типы данных: single | double
Maximum number of track branches per track - Максимальное количество ответвлений пути на один путь3 (по умолчанию) | положительное целое числоМаксимальное количество ветвей дорожки (гипотез), допустимое для каждой дорожки, указанное как положительное целое число. Большие значения увеличивают вычислительную нагрузку.
Типы данных: single | double
Maximum number of scans maintained in the branch history - Максимальное количество сканирований, сохраненных в истории филиала4 (по умолчанию) | положительное целое числоМаксимальное число сканирований, сохраненных в журнале ветвей, указанное как положительное целое число. Количество сканирований журнала дорожек обычно составляет от 2 до 6. Большие значения увеличивают вычислительную нагрузку.
Типы данных: single | double
Minimum probability required to keep a branch - Минимальная вероятность сохранения филиала.001 (по умолчанию) | положительный скалярМинимальная вероятность, необходимая для сохранения ветви дорожки, заданная как положительный скаляр меньше единицы. Отсекают любую дорожку с вероятностью ниже указанной. Типичные значения от 0,001 до 0,005.
Пример: .003
Типы данных: single | double
N-scan pruning method - Метод обрезки N-сканирования'None' (по умолчанию) | 'Hypothesis'Метод отсечения N-scan, указанный как 'None' или 'Hypothesis'. При обрезке N-сканирования ветви, принадлежащие одной дорожке, отсекаются (удаляются), если в истории N-сканирований они противоречат наиболее вероятной ветви для той же дорожки. Наиболее вероятная ветвь определяется одним из двух способов:
'None' - Обрезка N-сканирования не выполняется.
'Hypothesis' - Выбранная ветвь находится в наиболее вероятной гипотезе.
Пример: 'Hypothesis'
Confirmation threshold [positive scalar] - Минимальный балл, необходимый для подтверждения отслеживания20 (по умолчанию) | положительный скалярМинимальный балл, необходимый для подтверждения дорожки, указан как положительный скаляр. Подтверждается любая трасса с результатом выше этого порога.
Пример: 12
Типы данных: single | double
Deletion threshold [negative scalar] - Максимальное падение баллов для удаления дорожки-7 (по умолчанию) | скалярМаксимальное падение баллов перед удалением дорожки, указанное как скаляр. Любая дорожка с результатом, который падает более чем на этот параметр из максимального значения, удаляется. На порог удаления влияет вероятность ложного аварийного сигнала.
Пример: -1
Типы данных: single | double
Probability of detection used for track score - Вероятность обнаружения, используемая для оценки трека0.9 (по умолчанию) | положительный скаляр от 0 до 1Вероятность обнаружения, заданная как положительный скаляр между 0 и 1. Это свойство используется для вычисления показателя дорожки.
Пример: 0.5
Типы данных: single | double
Rate of false positives used for track score - вероятность ложной тревоги, используемой для оценки трассы;1e-6 (по умолчанию) | скалярВероятность ложной тревоги, указанная как скаляр. Это свойство используется для вычисления показателя дорожки.
Пример: 1e-5
Типы данных: single | double
Volume of the sensor's detection bin - Объем измерительного бункера датчика1 (по умолчанию) | положительный скалярОбъем ячейки измерения датчика, указанный как положительный скаляр. Например, если радар производит измерение 4-D, которое включает азимут, отметку, дальность и дальность, объем 4-D определяется шириной углового луча радара, шириной ячейки диапазона и шириной ячейки диапазона. Объем используется для вычисления показателя дорожки при инициализации и обновлении дорожки.
Пример: 1.5
Типы данных: single | double
Rate of new tracks per unit volume - Коэффициент новых путей на единицу объема1 (по умолчанию) | положительный скалярЧастота новых дорожек на единицу объема, указанная как положительный скаляр. Параметр используется при вычислении показателя дорожки во время инициализации дорожки.
Пример: 2.5
Типы данных: single | double
Prediction time source - Источник времени прогнозированияAuto (по умолчанию) | Input portИсточник для времени прогнозирования, указанный как Input port или Auto. Выбрать Input port для ввода времени обновления с помощью входного порта прогнозируемого времени. В противном случае время обновления определяется часами моделирования, управляемыми Simulink.
Enable cost matrix input - Включить входной порт для матрицы затратВыберите этот параметр, чтобы включить ввод матрицы затрат с помощью порта ввода матрицы затрат.
Enable detectable branch IDs input - Включение ввода обнаруживаемых идентификаторов ветвейВыберите этот параметр, чтобы включить входной порт обнаруживаемых идентификаторов ветвей.
Enable tentative tracks output - Включить выходной порт для предварительных дорожекВыберите этот параметр для активизации вывода предварительных дорожек через выходной порт предварительных дорожек.
Enable all tracks output - Включить выходной порт для всех дорожекВыберите этот параметр, чтобы включить вывод всех дорожек через выходной порт All Tracks.
Enable information output - Включить выходной порт для анализа информацииВыберите этот параметр, чтобы включить выходной порт для анализа информации через выходной порт Info.
Enable all branches output - Включить выходной порт для всех ветвейВыберите этот параметр для активизации вывода всех ветвей через выходной порт All Branches.
Source of output bus name - Наименование выходной шины путиAuto (по умолчанию) | PropertyИсточник имени шины выходного пути, указанный как:
Auto - Блок автоматически создает имя шины выходного пути.
Property - укажите имя шины выходной дорожки с помощью параметра Specify an output bus name.
Source of output info bus name - Наименование шины выходной информацииAuto (по умолчанию) | PropertyИсточник имени шины выходной информации, указанный как:
Auto - блок автоматически создает имя шины выходной информации.
Property - укажите имя шины выходной информации с помощью параметра Specify an output info bus name.
Для включения этого параметра на вкладке Port Setting выберите Enable information output.
При обработке обнаружений с помощью трекера выполните следующие действия.
Трекер пытается назначить обнаружения существующим дорожкам.
Дорожка допускает множество гипотез о назначении обнаружений дорожкам.
Неназначенные обнаружения приводят к созданию новых дорожек.
Назначения обнаружений дорожкам создают ветви для назначенных дорожек.
Трассы без назначенных обнаружений раскладываются (прогнозируются).
Все ветви пути оценены. Срезают ветви с низкими начальными показателями.
Создаются кластеры ветвей, которые совместно используют обнаружения (несовместимые ветви) в своей истории.
Формулируются и оцениваются глобальные гипотезы совместимых ветвей.
Ветви оцениваются на основе их существования в глобальных гипотезах. Подрезают низкозаметные ветви.
Дополнительная обрезка выполняется на основе истории N-сканирования.
Все дорожки корректируются и прогнозируются по входному времени.
Три порога назначения, C1, C2 и C3, управляют (1) назначением обнаружения дорожке, (2) созданием новой ветви из обнаружения и (3) созданием новой ветви из неназначенной дорожки. Пороговые значения должны соответствовать: C1 < = C2 < = C3 .
Если стоимость присвоения равна C = costmatrix(i,j), следующие гипотезы создаются на основе сравнения стоимости со значениями пороговых значений назначения. Под каждым сравнением находится список возможных гипотез.
Совет:
Увеличьте значение C3, если есть обнаружения, которые должны быть назначены дорожкам, но не. Уменьшите значение, если есть обнаружения, которые назначены дорожкам, которым они не должны быть назначены (слишком далеко).
Увеличение значений C1 и C2 помогает контролировать количество создаваемых ветвей дорожки. Тем не менее, это уменьшает количество ветвей (гипотез), которые имеет каждая дорожка.
Чтобы отменить назначение каждой дорожки, установите значение C1 = 0.
Чтобы каждое обнаружение не назначалось, установите значение C2 = 0.
Все числовые входные данные могут иметь одну или двойную точность, но все они должны иметь одинаковую точность.
Поля структуры дорожки:
| Область | Определение |
|---|---|
SourceIndex | Уникальный индекс источника, используемый для различения источников отслеживания в среде нескольких трекеров. |
TrackID | Уникальный идентификатор дорожки, используемый для различения нескольких дорожек. |
BranchID | Уникальный идентификатор ветви дорожки, используемый для различения нескольких ветвей дорожки. |
UpdateTime | Время обновления дорожки. Единицы измерения в секундах. |
Age | Количество раз, когда дорожка выживала. |
State | Значение вектора состояния во время обновления. |
StateCovariance | Ковариационная матрица неопределенности. |
TrackLogic | Логический тип подтверждения и удаления, возвращенный как 'History' или 'Integrated'. |
TrackLogicState | Текущее состояние типа логики дорожки. На основе типа логики
|
IsConfirmed | Статус подтверждения. Это поле true если дорожка подтверждена как реальная цель. |
IsCoasted | Состояние движения по побережью. Это поле true если дорожка обновляется без нового обнаружения. |
IsSelfReported | Укажите, сообщается ли трекер о дорожке. Это поле используется в среде слияния дорожек. Возвращается как |
ObjectClassID | Целое значение, представляющее классификацию объектов. Стоимость 0 представляет неизвестную классификацию. Ненулевые классификации применяются только к подтвержденным трекам. |
ObjectAttributes | Дополнительная информация о дорожке. |
[1] Вертманн, Дж. Р. «Пошаговое описание вычислительно эффективной версии отслеживания множественных гипотез». В Международном обществе оптики и фотоники, т. 1698, стр. 228-301, 1992.
[2] Блэкман, С. и Р. Пополи. Проектирование и анализ современных систем слежения. Радарная библиотека Artech House, Бостон, 1999 год.
fusionRadarSensor | irSensor | objectDetection | objectTrack | sonarSensor | trackerGNN | trackingABF | trackingCKF | trackingEKF | trackingGSF | trackingIMM | trackingKF | trackingMSCEKF | trackingPF | trackingUKF1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
