Совместный вероятностный трекер ассоциации данных
Панель инструментов для слияния и отслеживания датчиков/алгоритмы отслеживания нескольких объектов
Блок мультиобъектного трекера Объединенной вероятностной ассоциации данных способен обрабатывать обнаружения множества целей от множества датчиков. Трекер использует совместную вероятностную ассоциацию данных для назначения обнаружений каждой дорожке. Трекер применяет мягкое назначение, в котором множественные обнаружения могут вносить вклад в каждую дорожку. Трекер инициализирует, подтверждает, корректирует, прогнозирует (выполняет накрутку) и удаляет дорожки. Трекер оценивает вектор состояния и ковариационную матрицу ошибки оценки состояния для каждой дорожки. Каждое обнаружение назначается, по меньшей мере, одной дорожке. Если обнаружение не может быть назначено какой-либо существующей дорожке, трекер создает новую дорожку.
Любой новый трек начинается в предварительном состоянии. Если предварительной дорожке назначено достаточно обнаружений, ее статус изменяется на подтвержденный. Если обнаружение уже имеет известную классификацию ( ObjectClassID поле возвращаемой дорожки ненулевое), что соответствующая дорожка подтверждается немедленно. Когда дорожка подтверждена, трекер считает, что дорожка представляет физический объект. Если обнаружения не назначены дорожке в пределах заданного количества обновлений, дорожка удаляется.
В типичном рабочем процессе для системы отслеживания трекер должен определить, может ли обнаружение быть связано с какой-либо из существующих дорожек. Если трекер поддерживает только одну дорожку, назначение может быть выполнено путем оценки проверочного затвора вокруг предсказанного измерения и принятия решения о том, попадает ли измерение в проверочный затвор. В пространстве измерения проверочный затвор представляет собой пространственную границу, такую как эллипс 2-D или эллипсоид 3-D, центрированный при прогнозируемом измерении. Проверочный вентиль определяется с использованием информации о вероятности (оценка состояния и ковариация, например) существующей дорожки, так что правильные или идеальные обнаружения имеют высокую вероятность (97% вероятность, например) попадания в этот проверочный вентиль.
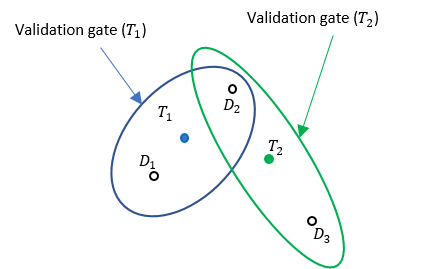
Однако, если трекер поддерживает множество дорожек, процесс ассоциации данных становится более сложным, поскольку одно обнаружение может попасть в вентили проверки достоверности множества дорожек. Например, на следующем рисунке дорожки T1 и T2 активно поддерживаются в трекере, и каждая из них имеет свой вентиль проверки. Поскольку D2 обнаружения находится на пересечении вентилей проверки достоверности как T1, так и T2, две дорожки (T1 и T2) соединены и образуют кластер. Кластер - это набор подключенных дорожек и связанных с ними обнаружений.
Для представления отношения связи в кластере обычно используется матрица проверки. Каждая строка матрицы проверки соответствует обнаружению, в то время как каждый столбец соответствует дорожке. Для учета вероятности того, что каждое обнаружение будет загромождаться, добавляется первый столбец, который обычно называют «дорожкой 0» или T0. Если детектор Di находится внутри проверочного вентиля дорожки Dj, то (j, i + 1) запись проверочной матрицы равна 1. В противном случае он равен нулю. Для кластера, показанного на рисунке, проверочная матрица
Обратите внимание на то, что все элементы в первом столбце Λ равны 1, поскольку любое обнаружение может быть загроможденным или ложным. Важным шагом в логике ассоциации совместных вероятностных данных (JPDA) является получение всех возможных независимых совместных событий в кластере. Двумя предположениями для возможных совместных мероприятий являются:
Обнаружение не может быть выдано несколькими дорожками.
Во время одного сканирования датчик не может обнаружить дорожку более одного раза.
На основе этих двух предположений могут быть сформулированы возможные совместные события (FJE). Каждый FJE отображается на FJE-матрицу Startp из начальной проверочной матрицы Λ. Например, с помощью проверочной матрицы Λ можно получить восемь матриц FJE:
Как прямое следствие этих двух предположений, matrices Startp имеет ровно одно значение «1» на строку. Кроме того, за исключением первого столбца, отображаемого для загромождения, может быть не более одного «1» на столбец. Когда количество соединенных дорожек растет в кластере, количество FJE быстро увеличивается. jpdaEvents функция использует эффективный алгоритм поиска по глубине для генерации всех возможных матриц совместных событий.
objectDetection | objectTrack | staticDetectionFuser | trackerGNN | trackerTOMHT | trackHistoryLogic | trackingABF | trackingCKF | trackingEKF | trackingIMM | trackingKF | trackingUKF
