Программное обеспечение Fuzzy Logic Toolbox™ поддерживает два типа систем нечеткого вывода:
Системы Мамдани
Системы Сугено
| Система нечеткого вывода | Преимущества |
|---|---|
| Mamdani |
|
| Sugeno |
|
Мамдани нечеткий вывод был впервые введен как метод создания системы управления путем синтеза набора правил лингвистического контроля, полученных от опытных операторов человека [1]. В системе Мамдани выход каждого правила является нечетким набором.
Поскольку системы Mamdani имеют более интуитивно понятные и более простые в понимании базы правил, они хорошо подходят для приложений экспертных систем, где правила создаются на основе экспертных знаний человека, таких как медицинская диагностика.
Процесс вывода системы Мамдани описан в документе Fuzzy Inverence Process и обобщен на следующем рисунке.
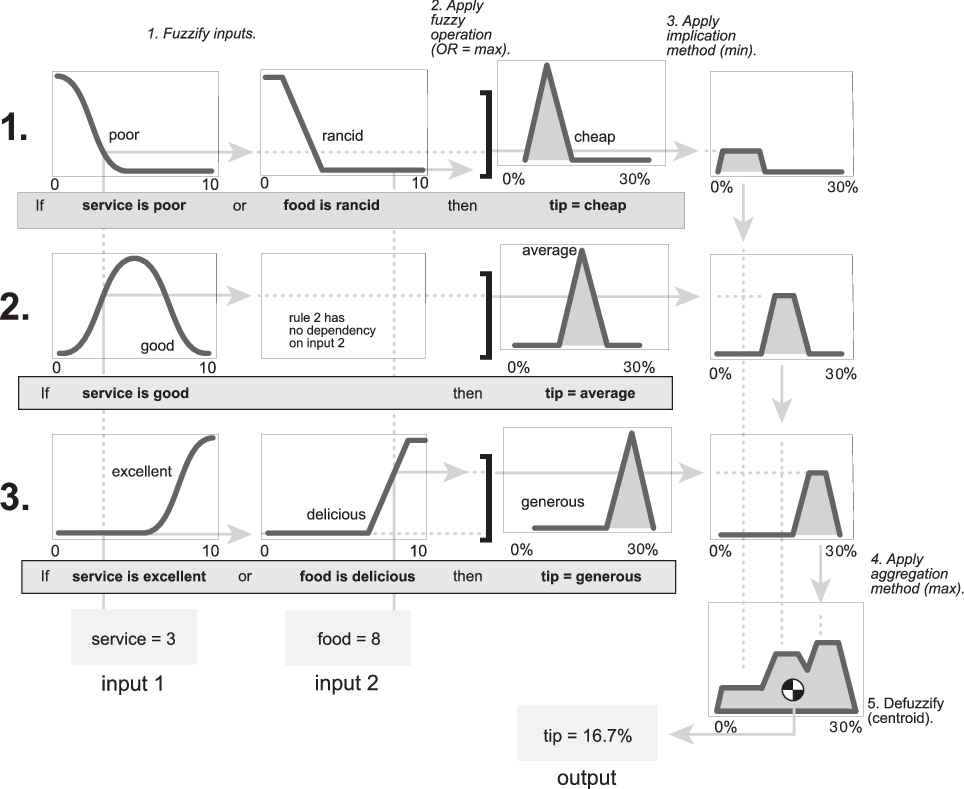
Выходные данные каждого правила представляют собой нечеткий набор, полученный из функции членства выходных данных и метода импликации FIS. Эти выходные нечеткие наборы объединяются в один нечеткий набор с использованием метода агрегирования FIS. Затем, чтобы вычислить конечное точное выходное значение, объединенное выходное нечеткое множество дефузизируется с использованием одного из методов, описанных в методе дефузификации.
Нечеткий вывод Сугено, также называемый нечетким выводом Такаги-Сугено-Кана, использует синглтонные функции членства выхода, которые являются либо постоянной, либо линейной функцией входных значений. Процесс дефузификации для системы Сугено более эффективен в вычислительном отношении по сравнению с системой Мамдани, поскольку он использует средневзвешенную или взвешенную сумму нескольких точек данных, а не вычисляет центроид двумерной области. [2]
Вы можете преобразовать систему Mamdani в систему Sugeno с помощью convertToSugeno функция. Полученная система Sugeno имеет постоянные функции членства на выходе, которые соответствуют центроидам функций членства на выходе Mamdani.
Каждое правило в системе Sugeno работает, как показано на следующей диаграмме, которая показывает систему с двумя входами с входными значениями x и y.
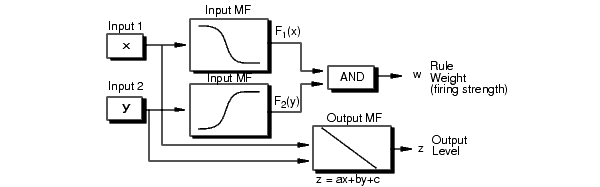
Каждое правило генерирует два значения:
zi - уровень вывода правила, который является либо постоянным значением, либо линейной функцией входных значений:
biy + ci
Здесь, x и y являются значениями входа 1 и входа 2, соответственно, и ai, bi и ci являются постоянными коэффициентами. Для системы Сугено нулевого порядка zi является константой (a = b = 0).
wi - Сила стрельбы правила, производная от предшествующего правила
F2 (y))
Здесь F1 (...) и F2 (...) являются функциями членства для входов 1 и 2 соответственно.
Выходом каждого правила является взвешенный уровень выхода, который является произведением wi и zi.
Самый простой способ визуализировать сугеновские системы первого порядка (a и b ненулевые) - это думать о каждом правиле как об определении местоположения движущегося синглтона. То есть, одиночные выходные пики могут перемещаться линейно в пределах выходного пространства, в зависимости от входных значений. Сила стрельбы по правилу определяет размер одиночного пика.
Конечным выходом системы является средневзвешенное значение по всем выходам правил:
где N - количество правил.
На следующем рисунке показан процесс нечеткого вывода для системы Сугено.
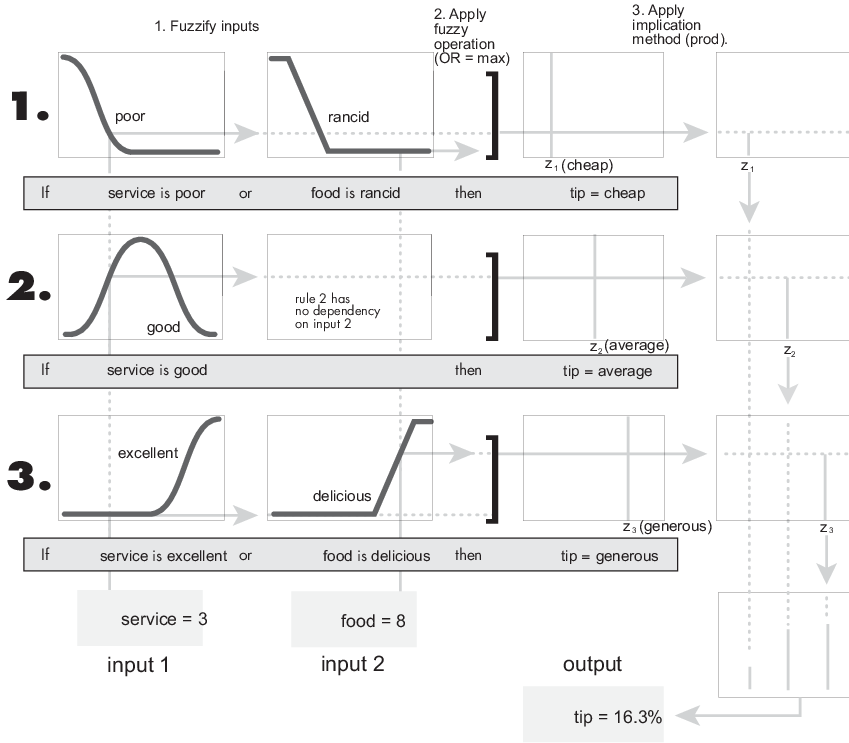
Примечание
Системы Sugeno всегда используют импликацию продукта и агрегирование суммы.
Из-за линейной зависимости каждого правила от входных переменных метод Сугено идеально подходит для того, чтобы действовать в качестве интерполирующего супервизора множества линейных контроллеров, которые должны применяться, соответственно, к различным рабочим условиям динамической нелинейной системы. Например, рабочие характеристики летательного аппарата могут резко меняться в зависимости от высоты и числа Маха. Линейные контроллеры, хотя и просты в вычислении и подходят для любого конкретного условия полета, должны регулярно и плавно обновляться, чтобы не отставать от изменяющегося состояния летного аппарата. Система нечеткого вывода Сугено подходит для задачи плавной интерполяции линейных коэффициентов усиления, которые будут применяться во входном пространстве; это естественный и эффективный планировщик усиления. Аналогично, система Сугено подходит для моделирования нелинейных систем путем интерполяции между несколькими линейными моделями.
[1] Мамдани, Э. Х. и С. Ассилиан. «Эксперимент в лингвистическом синтезе с нечетким логическим контроллером». Международный журнал человеко-машинных исследований 7, № 1 (январь 1975 года): 1-13. https://doi.org/10.1016/S0020-7373 (75) 80002-2.
[2] Sugeno, Michio, ред. Промышленные применения нечеткого контроля. Амстердам; Нью-Йорк: Нью-Йорк, Нью-Йорк, США: Северная Голландия; Единственный дистрибьютор в США и Канаде, Elsevier Science Pub. Ко, 1985.
