Оценка модели непрерывного процесса для системы с одним входом и одним выходом (SISO) во временной или частотной области в интерактивном редакторе
Чтобы добавить задачу Оценка модели процесса в живой сценарий в редакторе MATLAB, выполните следующие действия.
На вкладке «Интерактивный редактор» выберите «Задача» > «Оценить модель процесса».
В блоке кода в сценарии введите соответствующее ключевое слово, например process или estimate. Выбрать Estimate Process Model из предложенных завершений команды.
Используйте задачу Оценить динамический редактор модели процесса (Estimate Process Model Live Editor), чтобы оценить модель состояния-пространства и сравнить выходные данные модели с данными измерений.
Откройте этот пример, чтобы просмотреть предварительно настроенный сценарий, содержащий задачу.
Настройка данных
Загрузить данные измерений iddata1 в рабочую область MATLAB.
load iddata1 z1 z1
z1 =
Time domain data set with 300 samples.
Sample time: 0.1 seconds
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
Импорт данных в задачу
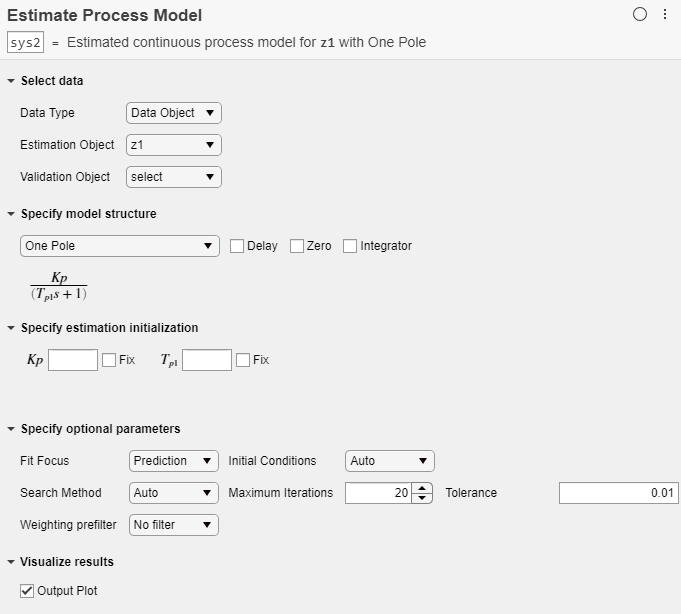
В разделе «Выбор данных» задайте для параметра «Тип данных» значение Data Object и задайте для объекта оценки значение z1.

Объект данных содержит имена входных и выходных переменных, а также время выборки, поэтому указывать их не требуется.
Оценка модели с использованием настроек по умолчанию
Проверьте структуру модели и дополнительные параметры.

В разделе Указать структуру модели (Specify model structure) опция по умолчанию: One Pole без задержки, нуля или интегратора. Уравнения под параметрами в этом разделе отображают указанную структуру.
В разделе Указать инициализацию оценки параметры инициализации, соответствующие параметрам в структуре модели, позволяют задавать начальные точки для оценки. При выборе опции Исправить (Fix) параметр остается фиксированным к указанному значению. В этом примере не указывайте инициализацию. Затем задача использует значения по умолчанию для начальных точек.
В разделе Указать дополнительные параметры (Specify optional parameters) задаются параметры по умолчанию для оценки процесса.
Выполните задачу на вкладке Live Editor с помощью команды Выполнить. График отображает оценочные данные, оценочные выходные данные модели и процент аппроксимации.

Эксперимент с настройками параметров
Поэкспериментируйте с настройками параметров и посмотрите, как они влияют на посадку.
Например, добавьте задержку к One Pole структурировать и запустить задачу.


Оценка соответствия улучшается, хотя процент соответствия все еще ниже 50%.
Попробуйте использовать другую структуру модели. В поле Указать структуру модели (Specify model structure) выберите Underdamped Pair без задержки и запустите задачу.


Результаты подгонки значительно улучшаются.
Создать код
Для отображения кода, создаваемого задачей, щелкните в нижней части раздела параметров. Отображаемый код отражает текущую конфигурацию параметров задачи.
в нижней части раздела параметров. Отображаемый код отражает текущую конфигурацию параметров задачи.

Используйте отдельные данные оценки и проверки, чтобы можно было проверить расчетную модель процесса.
Откройте этот пример, чтобы просмотреть предварительно настроенный сценарий, содержащий задачу.
Настройка данных
Загрузить данные измерений iddata1 в рабочую область MATLAB и проверьте ее содержимое.
load iddata1 z1 z1
z1 =
Time domain data set with 300 samples.
Sample time: 0.1 seconds
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
Извлеките входные и выходные измерения.
u = z1.u; y = z1.y;
Разбейте данные на два набора: половина для оценки и половина для проверки. Исходный набор данных содержит 300 выборок, поэтому каждый новый набор данных содержит 150 выборок.
u_est = u(1:150); u_val = u(151:300); y_est = y(1:150); y_val = y(151:300);
Импорт данных в задачу
В разделе «Выбор данных» установите для параметра «Тип данных» значение «Время». Установите время выборки равным 0.1 секунд, которое является временем выборки в оригинале iddata объект z1. Выберите соответствующие наборы данных для оценки и проверки.

Оценка и проверка модели
В примере Оценка модели процесса с помощью задачи интерактивного редактора (Estimate Process Model with Live Editor Task) достигаются наилучшие результаты с использованием структуры модели. Underdamped Pair. Выберите ту же опцию для этого примера.

Выполните задачу на вкладке Live Editor с помощью команды Выполнить. При выполнении задания создаются два графика. Первый график показывает результаты оценки, а второй график показывает результаты проверки.

Соответствие данным оценки несколько хуже, чем в модели процесса оценки с задачей «Оперативный редактор». Оценка в текущем примере имеет только половину данных, с помощью которых можно оценить модель. Соответствие проверочным данным, которое представляет благость модели в более общем плане, лучше, чем соответствие оценочным данным.
Data Type - Тип данных для входных и выходных данныхTime (по умолчанию) | Frequency | Data ObjectЗадача принимает одноканальные числовые значения измерений, которые равномерно дискретизируются во времени. Данные могут быть упакованы в числовые массивы (Time или Frequency тип) или в объекте данных, таком как iddata или idfrd объект.
Выбранный тип данных определяет дополнительные параметры, которые необходимо указать.
Time - Укажите время образца и время начала в выбранных единицах времени.
Frequency - укажите частоту, выбрав имя переменной частотного вектора в рабочей области MATLAB. Укажите единицы измерения для этого частотного вектора. Укажите время выборки в секундах.
Data Object - не указывать дополнительные параметры, поскольку объект данных уже содержит информацию о временной или частотной выборке.
Estimation Input and Estimation Output - Переменные наименования входных и выходных данных для оценкиВыберите имена входных и выходных переменных из вариантов рабочей области MATLAB. Используйте эти параметры, когда тип данных имеет значение Time или Frequency.
Estimation Object - имя переменной объекта данных, содержащего входные и выходные данные, которые будут использоваться для оценки;Выберите имя переменной объекта данных из вариантов рабочей области MATLAB. Используйте этот параметр, если тип данных имеет значение Data Object.
Validation Input (u) and Validation Output (y) - Переменные имена входных и выходных данных, которые будут использоваться для проверки достоверности Выберите имена входных и выходных переменных или имя объекта данных из вариантов рабочей области. Используйте эти параметры, когда тип данных имеет значение Time или Frequency. Указание данных проверки необязательно, но рекомендуется.
Validation Object - имя переменной объекта данных, содержащего входные и выходные данные для проверки;Выберите имя переменной объекта данных из вариантов рабочей области MATLAB. Используйте этот параметр, если тип данных имеет значение Data Object. Указание данных проверки необязательно, но рекомендуется.
Structure - нули и полюса в моделиOne Pole (по умолчанию) | Two Real Poles | Underdamped Pair | Underdamped Pair + Real PoleЗадача позволяет указать одну из четырех базовых структур. Эти структуры варьируются от простого процесса первого порядка до более динамического процесса второго порядка или третьего порядка с комплексными сопряженными (недампированными) полюсами.
One Pole
Two Real Poles
Underdamped Pair
Underdamped Pair + Real Pole
Delay - Включить задержку транспортировкиВключить задержку передачи или задержку ввода-вывода одной выборки. Задержка транспортировки также известна как время покоя.
Zero - Включить нулевой процессВключите нулевой процесс в числитель.
Integrator - Включить интеграторВключить интегратор, представленный дополнительным термином 1/с. В том числе интегратор создает саморегулирующийся процесс.
Initial Values - Исходные значения параметров конструкцииУкажите начальные значения для оценки и необходимо ли фиксировать или оценивать эти значения. Задаваемые значения зависят от структуры модели и спецификаций задержки и нуля. Под опцией Указать структуру модели (Specify model structure) задача отображает уравнение, представляющее указанную систему. Это уравнение содержит все параметры, которые можно оценить и которые можно инициализировать или исправить. Возможные параметры:
Kp - Статический коэффициент усиления
Tp1 - постоянная времени для первого реального полюса
Tp2 - Постоянная времени для второго реального полюса
Тс - постоянная времени для комплексных полюсов, равная обратной собственной частоте
start- Коэффициент демпфирования для комплексных полюсов
Td - Задержка транспортировки
Tz - постоянная времени для процесса ноль
Все зависящие от времени параметры находятся в единицах времени, выбранных для параметра «Sample Time».
Fit Focus - Минимизация ошибок прогнозирования или моделированияPrediction (по умолчанию) | SimulationFit focus указывает, какую ошибку следует минимизировать в функции потерь во время оценки.
Prediction - Минимизация ошибки одношагового прогнозирования между измеренными и прогнозируемыми выходами. Этот подход оценки фокусируется на создании хорошей модели предсказателя для входных и выходных данных оценки. Фокус прогнозирования обычно дает наилучшие результаты оценки, поскольку он использует как входные, так и выходные измерения, тем самым учитывая возмущения.
Simulation - Минимизация погрешности между измеренными и имитационными выходами. Этот подход оценки фокусируется на получении смоделированной реакции модели, которая хорошо соответствует входным и выходным данным оценки. Фокус моделирования, как правило, лучше всего подходит для проверки, особенно с наборами данных, не используемыми для первоначальной оценки.
Initial Conditions - Обработка исходных условийAuto (по умолчанию) | Zero | Estimate | BackcastУстановите эту опцию, если требуется выбрать конкретный метод инициализации модели. С настройкой по умолчанию Auto, программное обеспечение выбирает способ на основе данных оценки. Возможны следующие варианты:
Zero - Начальное состояние устанавливается равным нулю.
Estimate - Исходное состояние рассматривается как независимый оценочный параметр.
Backcast - Начальное состояние оценивается с использованием наилучшего вписывания наименьших квадратов.
Input Intersampling - Интерсамплинговое поведение для входного сигналаZero-order hold (по умолчанию) | Triangle approximation | Band-limitedВходная интерсампляция является свойством входных данных. Задача использует это свойство при оценке моделей процессов. Укажите интерсамплинг ввода, когда тип данных Time или Frequency. При использовании iddata объект уже содержит информацию о промежуточной выборке. Варианты для этого свойства:
Zero-order hold - Кусочно-постоянный входной сигнал между образцами
Triangle approximation - Кусочно-линейный входной сигнал между выборками, также известный как удержание первого порядка
Band-limited - Входной сигнал имеет нулевую мощность выше частоты Найквиста
Search Method - Режим численного поиска для итеративной оценки параметровAuto (по умолчанию) | Gauss-Newton | Adaptive Gauss-Newton | Levenberg-Marquardt | Gradient Search
Auto - Для каждой итерации программное обеспечение циклически использует методы, пока не найдет первое направление спуска, что приводит к снижению стоимости оценки.
Gauss-Newton - Подпространство поиска наименьших квадратов Гаусса-Ньютона.
Levenberg-Marquardt - поиск наименьших квадратов Левенберга-Марквардта.
Adaptive Gauss-Newton - адаптивный подпространственный поиск Гаусса-Ньютона.
Gradient Search - Поиск самых крутых спускаемых наименьших квадратов.
Max. Iterations - Максимальное число итераций при минимизации ошибокУстановка максимального количества итераций во время минимизации ошибок. Итерации прекращаются, когда Макс. Достигнуты итерации или удовлетворен другой критерий остановки, например Допуск (Tolerance).
Tolerance - Минимальный процент ожидаемого улучшения ошибкиЕсли процент ожидаемого улучшения меньше, чем Допуск (Tolerance), итерации прекращаются.
Weighting Prefilter - Предварительный фильтр взвешивания для функции потерьNo filter (по умолчанию) | Passband(s) | LTI Filter | Frequency weights vectorУстановите эту опцию, если требуется применить весовой предварительный фильтр к функции потерь, которую задача сводит к минимуму при оценке модели. При выборе опции необходимо также выбрать связанную переменную в рабочей области, содержащую информацию о фильтре. Доступные параметры зависят от области данных.
| Весовой предварительный фильтр | Data Domain | Сведения о фильтре |
|---|---|---|
No Filter | Время и частота | |
Passbands | Время и частота | Диапазоны полосы пропускания, задаваемые как вектор строки 1 на 2 или матрица n на 2, где n - число полос пропускания |
LTI Filter | Время и частота | Модель LTI SISO |
Frequency Weights Vector | Частота | Частотные веса, определяемые как вектор-столбец с той же длиной, что и частотный вектор |
Например, предположим, что выполняется оценка с использованием данных частотной области SISO и что в рабочей области MATLAB имеется вектор столбца. W содержит весовые коэффициенты частоты для предварительного фильтра. В задании выберите Весовой предварительный фильтр > Вектор весов частоты и переменная W.
Output Plot - Графическое сравнение модели и измеренных выходных данныхПостройте график сравнения выходных данных модели и исходных измеренных данных, а также процента соответствия. При наличии отдельных данных проверки второй график сравнивает отклик модели на входные данные проверки с результатами измерений из набора данных проверки.
compare | iddata | idfrd | idproc | procest | procestOptions | frd (Панель инструментов системы управления)
