Оценка модели состояния пространства с использованием временных или частотных данных в редакторе Live Editor
Чтобы добавить задачу Оценка модели состояния-пространства к сценарию в реальном времени в редакторе MATLAB, выполните следующие действия.
На вкладке «Интерактивный редактор» выберите «Задача» > «Оценить модель состояния-пространства».
В блоке кода в сценарии введите соответствующее ключевое слово, например state, space, или estimate. Выбрать Estimate State Space Model из предложенных завершений команды.
Используйте задачу Оценить состояние-пространство (Estimate State-Space Model Live Editor), чтобы оценить модель состояния-пространства и сравнить выходные данные модели с данными измерений.
Откройте этот пример, чтобы просмотреть предварительно настроенный сценарий, содержащий задачу.
Настройка данных
Загрузить данные измерений iddata1 в рабочую область MATLAB.
load iddata1 z1 z1
z1 =
Time domain data set with 300 samples.
Sample time: 0.1 seconds
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
Импорт данных в задачу
В разделе «Выбор данных» задайте для параметра «Тип данных» значение Data Object и задайте для объекта оценки значение z1.

Объект данных содержит имена входных и выходных переменных, а также время выборки, поэтому указывать их не требуется.
Оценка модели с использованием настроек по умолчанию
Проверьте структуру модели и дополнительные параметры.

В разделе Указать структуру модели для заказа завода установлено значение по умолчанию: 4 и модель находится в непрерывной временной области. Уравнения под параметрами в этом разделе отображают указанную структуру.
В разделе Указать дополнительные параметры отображаются параметры по умолчанию для оценки состояния пространства.
Выполните задачу на вкладке Live Editor с помощью команды Выполнить. График отображает оценочные данные, оценочные выходные данные модели и процент аппроксимации.

Эксперимент с настройками параметров
Поэкспериментируйте с настройками параметров и посмотрите, как они влияют на посадку.
Например, в пункте Указать структуру модели (Specify model structure) выбрано поле Оценить возмущение (Estimate ristance), поэтому матрица возмущений K присутствует в уравнениях. Если очистить рамку, термин K исчезнет. Запустите обновленную конфигурацию и посмотрите, как изменяется посадка.


Измените значение параметра «Заказ на завод» на «Выбор наилучшего значения в диапазоне». Значение по умолчанию: 1:10.

При запуске модели на графике «Выбор порядка модели» отображается вклад каждого состояния в динамическое поведение модели. При исходных настройках задания для других параметров на графике отображается рекомендация 2 для порядка модели.

Примите эту рекомендацию, нажав кнопку «Применить», и узнайте, как это изменение влияет на вписывание.

Создать код
Для отображения кода, создаваемого задачей, щелкните в нижней части раздела параметров. Отображаемый код отражает текущую конфигурацию параметров задачи.
в нижней части раздела параметров. Отображаемый код отражает текущую конфигурацию параметров задачи.

Используйте отдельные данные оценки и проверки, чтобы можно было проверить предполагаемое состояние модели пространства.
Откройте этот пример, чтобы просмотреть предварительно настроенный сценарий, содержащий задачу.
Настройка данных
Данные измерения нагрузки iddata1 в рабочую область MATLAB и проверьте ее содержимое.
load iddata1 z1 z1
z1 =
Time domain data set with 300 samples.
Sample time: 0.1 seconds
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
Извлеките входные и выходные измерения.
u = z1.u; y = z1.y;
Разбейте данные на два набора: половина для оценки и половина для проверки. Исходный набор данных содержит 300 выборок, поэтому каждый новый набор данных содержит 150 выборок.
u_est = u(1:150); u_val = u(151:300); y_est = y(1:150); y_val = y(151:300);
Импорт данных в задачу
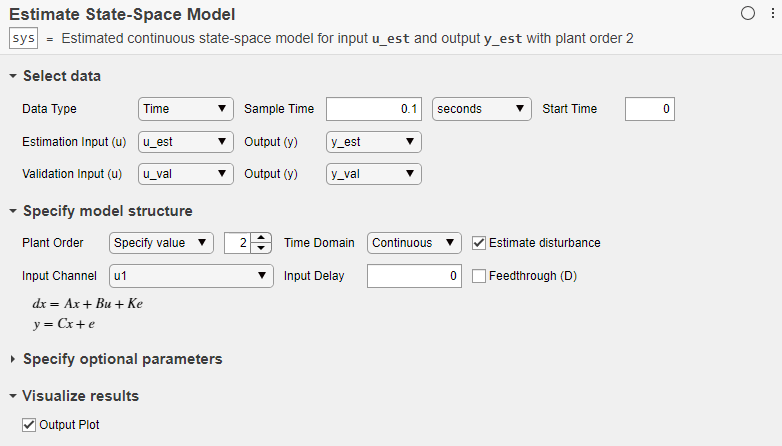
В разделе «Выбор данных» задайте для параметра «Тип данных» значение Time. Задать время выборки равным 0.1 секунд, которое является временем выборки в оригинале iddata объект z1. Выберите соответствующие наборы данных для оценки и проверки.

Оценка и проверка модели
В примере Оценка модели состояния-пространства с помощью задачи «Интерактивный редактор» (Estimate State-Space Model with Live Editor) рекомендуется порядок модели 2. Используйте это значение для заказа завода. Оставьте другие параметры значениями по умолчанию. Следует отметить, что входной канал относится не к набору входных данных, а к индексу канала в наборе входных данных, который для системы с одним входом всегда u1.

Выполните задачу на вкладке Live Editor с помощью команды Выполнить. При выполнении задания создаются два графика. Первый график показывает результаты оценки, а второй график показывает результаты проверки.

Соответствие данным оценки несколько хуже, чем в модели состояния-пространства оценки с задачей Live Editor. Оценка в текущем примере имеет только половину данных, с помощью которых можно оценить модель. Соответствие проверочным данным, которое представляет благость модели в более общем плане, лучше, чем соответствие оценочным данным.
Data Type - Тип данных для входных и выходных данныхTime (по умолчанию) | Frequency | Data ObjectЗадача принимает числовые значения измерений, которые равномерно дискретизируются во времени. Входные и выходные сигналы могут содержать множество каналов. Данные могут быть упакованы в числовые массивы (для Time или Frequency) или в объекте данных, таком как iddata или idfrd объект.
Выбранный тип данных определяет необходимость указания дополнительных параметров.
Time - Укажите время образца и время начала в выбранных единицах времени.
Frequency - укажите частоту, выбрав имя переменной частотного вектора в рабочей области MATLAB. Укажите единицы измерения для этого частотного вектора. Укажите время выборки в секундах.
Data Object - не указывать дополнительные параметры, поскольку объект данных уже содержит информацию о временной или частотной выборке.
Estimation Input (u) and Estimation Output (y) - Переменные наименования входных и выходных данных для оценкиВыберите имена входных и выходных переменных из вариантов рабочей области MATLAB. Используйте эти параметры, когда тип данных имеет значение Time или Frequency.
Estimation Object - имя переменной объекта данных, содержащего входные и выходные данные для оценки;Выберите имя переменной объекта данных из вариантов рабочей области MATLAB. Используйте этот параметр, если тип данных имеет значение Data Object.
Validation Input (u) and Validation Output (y) - Переменные имена входных и выходных данных для проверкиВыберите имена входных и выходных переменных из вариантов рабочей области. Используйте эти параметры, когда тип данных имеет значение Time или Frequency. Указание данных проверки необязательно, но рекомендуется.
Validation Object - имя переменной объекта данных, содержащего входные и выходные данные для проверки;Выберите имя переменной объекта данных из вариантов рабочей области MATLAB. Используйте этот параметр, если тип данных имеет значение Data Object. Указание данных проверки необязательно, но рекомендуется.
Plant Order - Порядок оценки моделиЗадача позволяет указать одно значение или диапазон значений для порядка оценки модели.
Specify value - явно указать порядок модели.
Pick best value in range - Укажите диапазон значений, например: 1:10. При выполнении задачи график сингулярного значения Ханкеля визуализирует относительный вклад энергии каждого состояния в расчетной модели и рекомендует наименьший порядок воспроизведения критического динамического поведения. Выполните эту рекомендацию или выберите другой заказ в поле Выбранный заказ. Нажмите кнопку Применить (Apply), чтобы принять заказ модели и продолжить.
Time Domain - Непрерывная или дискретная временная областьContinuous (по умолчанию) | DiscreteВыберите модель непрерывного или дискретного времени.
Estimate Disturbance - Включить нарушения в модель оценкиВыберите эту опцию для оценки модели возмущения. При выборе этой опции уравнения модели обновляются, чтобы показать матрицу K и член e.
Input Channel - Настройка параметров задержки и прохождения входного каналаДля каждого входного канала назначьте значения «Входная задержка» и «Транзитный канал».
Входной канал (Input Channel) - выберите входной канал. Входной канал всегда имеет вид ui, где i - i-й канал входа u.
Входная задержка (Input Delay) - введите входную задержку в количестве выборок (модель дискретного времени) или в количестве единиц времени (модель непрерывного времени) для канала. Например, задать 0,2-секундную задержку на входе для системы непрерывного времени, для которой единицей времени является milliseconds, введите 200.
Проход (Feedthrough) - выберите эту опцию для оценки прохода канала от входа к выходу. При выборе этой опции уравнения модели обновляются для отображения элемента Du.
Fit Focus - Минимизация ошибок прогнозирования или моделированияPrediction (по умолчанию) | SimulationFit focus указывает, какую ошибку следует минимизировать в функции потерь во время оценки.
Prediction - Минимизация ошибки одношагового прогнозирования между измеренными и прогнозируемыми выходами. Этот подход оценки фокусируется на создании хорошей модели предсказателя для входных и выходных данных оценки. Фокус прогнозирования обычно дает наилучшие результаты оценки, поскольку он использует как входные, так и выходные измерения, тем самым учитывая возмущения.
Simulation - Минимизация погрешности между измеренными и моделируемыми выходами. Этот подход оценки фокусируется на получении смоделированной реакции модели, которая хорошо соответствует входным и выходным данным оценки. Фокус моделирования, как правило, лучше всего подходит для проверки, особенно с наборами данных, не используемыми для первоначальной оценки.
Initial Conditions - Обработка начальных состоянийAuto (по умолчанию) | Zero | Estimate | BackcastУстановите эту опцию, если требуется выбрать конкретный метод инициализации состояний модели. С настройкой по умолчанию Auto, программное обеспечение выбирает способ на основе данных оценки. Возможны следующие варианты:
Zero - Начальное состояние устанавливается равным нулю.
Estimate - Исходное состояние рассматривается как независимый оценочный параметр.
Backcast - Начальное состояние оценивается с использованием наилучшего вписывания наименьших квадратов.
Input Intersampling - Интерсамплинговое поведение для входного сигналаZero-order hold (по умолчанию) | Triangle approximation | Band-limitedВходная интерсампляция является свойством входных данных. Задача использует это свойство при оценке непрерывных моделей. Укажите интерсамплинг ввода, когда тип данных Time или Frequency. При использовании iddata объект уже содержит информацию о промежуточной выборке. Варианты для этого свойства:
Zero-order hold - Кусочно-постоянный входной сигнал между образцами
Triangle approximation - Кусочно-линейный входной сигнал между выборками, также известный как удержание первого порядка
Band-limited - Входной сигнал имеет нулевую мощность выше частоты Найквиста
Search Method - Режим численного поиска для итеративной оценки параметровAuto (по умолчанию) | Gauss-Newton | Adaptive Gauss-Newton | Levenberg-Marquardt | Gradient Search
Auto - Для каждой итерации программное обеспечение циклически использует методы, пока не найдет первое направление спуска, что приводит к снижению стоимости оценки.
Gauss-Newton - Подпространство поиска наименьших квадратов Гаусса-Ньютона.
Levenberg-Marquardt - поиск наименьших квадратов Левенберга-Марквардта.
Adaptive Gauss-Newton - адаптивный подпространственный поиск Гаусса-Ньютона.
Gradient Search - Поиск самых крутых спускаемых наименьших квадратов.
Max. Iterations - Максимальное число итераций при минимизации ошибокУстановка максимального количества итераций во время минимизации ошибок. Итерации прекращаются, когда Макс. Достигнуты итерации или удовлетворен другой критерий остановки, например Допуск (Tolerance).
Tolerance - Минимальный процент ожидаемого улучшения ошибкиЕсли процент ожидаемого улучшения меньше, чем Допуск (Tolerance), итерации прекращаются.
Weighting Prefilter - Предварительный фильтр взвешивания для функции потерьNo filter (по умолчанию) | Passband(s) | LTI Filter | Frequency weights vector | Inverse of magnitude of the frequency response | Inverse of square root of magnitude of the frequency responseУстановите эту опцию, если требуется применить весовой предварительный фильтр к функции потерь, которую задача сводит к минимуму при оценке модели. При выборе опции необходимо также выбрать связанную переменную в рабочей области, содержащую информацию о фильтре. Доступные параметры зависят от области данных.
| Весовой предварительный фильтр | Data Domain | Сведения о фильтре |
|---|---|---|
No Filter | Время и частота | |
Passbands | Время и частота | Диапазоны полосы пропускания, задаваемые как вектор строки 1 на 2 или матрица n на 2, где n - число полос пропускания. |
LTI Filter | Время и частота | Модель LTI SISO. |
Frequency Weights Vector | Частота | Частотные веса, определяемые как вектор-столбец с той же длиной, что и частотный вектор. |
Inverse of magnitude of the frequency response | Частотная характеристика | Весовой фильтр ) |, где G (λ) - комплексные частотно-характеристические данные. Только системы SISO и SIMO. |
Inverse of square root of magnitude of the frequency response | Частотная характеристика | Весовой фильтр равен |. Только системы SISO и SIMO. |
Например, предположим, что выполняется оценка с использованием данных частотной области SISO и что в рабочей области MATLAB имеется вектор столбца. W содержит весовые коэффициенты частоты для предварительного фильтра. В задании выберите Весовой предварительный фильтр > Вектор весов частоты и переменная W.
Output Plot - Графическое сравнение модели и измеренных выходных данныхПостройте график сравнения выходных данных модели и исходных измеренных данных, а также процента соответствия. При наличии отдельных данных проверки второй график сравнивает отклик модели на входные данные проверки с результатами измерений из набора данных проверки.
compare | iddata | idfrd | idss | ssest | ssestOptions | frd (Панель инструментов системы управления)
