В физических аппаратных средствах ток двигателя, считываемый датчиками тока, фильтруется и масштабируется до диапазона измерения АЦП. Периферийное устройство АЦП в процессоре считывает текущие сигналы и выводит счетчики АЦП для текущего алгоритма управления. На этом рисунке показан пример того, как можно моделировать алгоритмы измерения фазового тока двигателя и формирования сигнала.
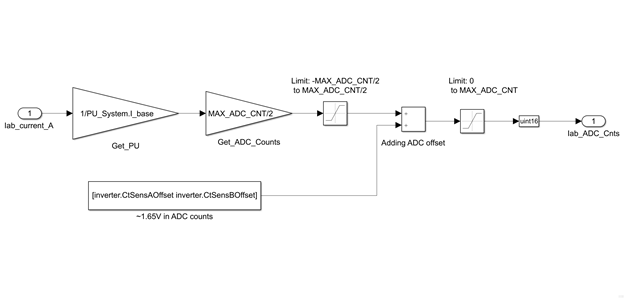
Максимальный измеряемый пиковый ток рассматривается как базовый ток. Отсчеты АЦП можно вычислить на основе значений основного тока, полноразмерного АЦП, а также смещения АЦП, используя следующее уравнение:
смещение АЦП
Параметры инвертора по умолчанию и схемы формирования сигналов для коммерчески доступных инверторов см. в mcb_SetInverterParameters.m файл. Чтобы добавить новую конфигурацию инвертора, создайте тип инвертора в этом файле и используйте его в сценарии инициализации модели для инициализации параметров. Если для измерения тока используются фильтры нижних частот, добавьте среднюю модель для фильтрации тока.
