Несколько явных контроллеров MPC
Панель инструментов управления прогнозом модели
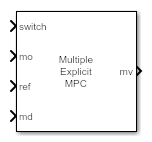
Блок множественных явных контроллеров MPC использует следующие входные сигналы:
Измеренные выходы установки (mo)
Опорная или уставка (ref)
Измеренное возмущение установки (md), при наличии
Сигнал переключения (switch)
Блок «Несколько явных контроллеров MPC» позволяет переходить между несколькими явными контроллерами MPC в режиме реального времени в соответствии с текущими рабочими условиями. Обычно каждый контроллер проектируется для определенной области рабочего пространства. Используя доступные измерения, вы обнаруживаете текущую рабочую область и выбираете соответствующий активный контроллер с помощью switch ввод.
Сигнал переключения выбирает активный контроллер из списка двух или более возможных явных MPC-контроллеров. Эти контроллеры уменьшают вычислительные усилия в режиме онлайн за счет использования закона управления табличным поиском в течение каждого интервала управления вместо решения задачи квадратичного программирования. Дополнительные сведения см. в разделе Явный контроллер MPC.
Для повышения эффективности неактивные контроллеры не оценивают свой закон управления. Однако для обеспечения безударной передачи между контроллерами неактивные контроллеры продолжают выполнять оценку состояния.
Как и для блока «Несколько контроллеров MPC», нельзя отключить оценку для блока «Несколько явных контроллеров MPC». Один контроллер всегда должен быть активным.
Как и блок явного контроллера MPC, блок множественного явного контроллера MPC поддерживает только подмножество дополнительных функций MPC, как описано в следующей таблице.
| Поддерживаемые функции | Неподдерживаемые функции |
|---|---|
|
|

