Явный прогнозирующий контроллер модели
Панель инструментов управления прогнозом модели
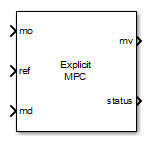
Блок явного контроллера MPC использует следующие входные сигналы:
Либо измеренные выходы установки (mo) или оценка пользовательского состояния (x[k|k])
Опорная или уставка (ref)
Измеренное возмущение установки (md), при наличии
Блок явного контроллера MPC использует таблицу поиска для хранения предварительно рассчитанного кусочно-аффинного оптимального закона управления вместо решения задачи оптимизации квадратичного программирования во время выполнения в каждом интервале управления, таком как блок контроллера MPC. Учитывая одну и ту же проблему MPC, два блока возвращают одно и то же решение. Блок явного контроллера MPC требует меньших вычислительных усилий в режиме онлайн, что полезно для приложений, которым требуется короткий интервал управления. Однако он имеет более значительные вычислительные усилия в автономном режиме и больший объем памяти. Действительно, комбинаторный характер явного MPC ограничивает его использование приложениями с относительно небольшим количеством входов, выходов и переменных состояния, коротким горизонтом прогнозирования и небольшим количеством ограничений выхода.
Явный контроллер MPC поддерживает только подмножество дополнительных функций MPC, как описано в следующей таблице.
| Поддерживаемые функции | Неподдерживаемые функции |
|---|---|
|
|



